背景
业务需求需要将某些解码后的视频帧保存为图片,大部分情况下图片都是正常的,更换了某些视频流后,在保存的图片顶部就会出现一条绿线,现记录下解决过程。

部分代码如下
解码回调如下,完整代码可参考之前的文章Gstreamer 硬解码Rtsp流及代码实现:
最终排查结果是:
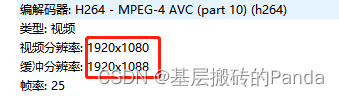
有些相机本身推的视频帧的大小与gstreame解码出来的 width 和 height不匹配导致的。如:gstreamer实际解出来的width = 1920, height = 1080, 但实际上一帧的数据是:1920 * 1088,多出来了8个字节。如果用获取到的width 和 height去计算拷贝帧的大小,在相机推送不标准的情况下就会出现该问题。
采用opencv保存图片,先将YUV转成NV12,再调用cv::imwrite() 。以19201080为例:
修复前,使用 解码得到的width 和 height计算帧大小:预期帧大小为:19201080*3 / 2 = 3,110,400
{
......
cv::Mat img;
// 创建并初始化原始YUV Mat对象
yuvNV12.create(height * 3 / 2, width, CV_8UC1);
memcpy(yuvNV12.data, map.data, width * height * 3 / 2);
// yuv to img Mat
cv::cvtColor(yuvNV12, img, cv::COLOR_YUV2BGR_NV12);
......
}
实际帧大小 map.size = 3,133,440:
{
......
cv::Mat img;
// 创建并初始化原始YUV Mat对象
yuvNV12.create((map.size / width), width, CV_8UC1);
memcpy(yuvNV12.data, map.data, map.size);
// yuv to img Mat
cv::cvtColor(yuvNV12, img, cv::COLOR_YUV2BGR_NV12);
}
GstFlowReturn ReadvideoFrame_callback(GstElement *sink, gpointer user_data)
{
CustomData *data = (CustomData *)user_data;
char video_format[32] = {0};
int framerate[2] = {0};
unsigned long long ts = 0;
GstSample *sample;
GstBuffer *buffer;
GstCaps *caps;
GstStructure *s;
gint width, height; // 图片的尺寸
// 使用pull-sample拉取视频帧,并映射到map变量,通过map拷贝出frame数据
g_signal_emit_by_name(sink, "pull-sample", &sample);
// g_print("new_sample succeeded (type '%d').\n", sample);
if (sample)
{
caps = gst_sample_get_caps(sample);
if (!caps)
{
g_print("gst_sample_get_caps fail\n");
gst_sample_unref(sample);
return GST_FLOW_ERROR;
}
s = gst_caps_get_structure(caps, 0);
gboolean res;
res = gst_structure_get_int(s, "width", &width); // 获取图片的宽
// g_print("width: %d, ", width);
res |= gst_structure_get_int(s, "height", &height); // 获取图片的高
// g_print("height: %d \n", height);
if (!res)
{
g_print("gst_structure_get_int fail\n");
gst_sample_unref(sample);
return GST_FLOW_ERROR;
}
const char *format = gst_structure_get_string(s, "format");
strcpy(video_format, format);
gst_structure_get_fraction(s, "framerate", &framerate[0], &framerate[1]);
// 获取视频的一帧buffer,注意,这个buffer是无法直接用的,它不是char类型
buffer = gst_sample_get_buffer(sample);
if (!buffer)
{
g_print("gst_sample_get_buffer fail\n");
gst_sample_unref(sample);
return GST_FLOW_ERROR;
}
GstMapInfo map;
// 把buffer映射到map,这样我们就可以通过map.data取到buffer的数据
auto rett = gst_buffer_map(buffer, &map, GST_MAP_READ);
if (rett)
{
cv::Mat yuvNV12;
cv::Mat img;
// 创建并初始化原始YUV Mat对象
// 有问题代码如下:
// yuvNV12.create(height * 3 / 2, width, CV_8UC1);
// memcpy(yuvNV12.data, map.data, width * height * 3 / 2);
//修复如下:
yuvNV12.create((map.size / width), width, CV_8UC1);
memcpy(yuvNV12.data, map.data, map.size);
// yuv to img Mat
cv::cvtColor(yuvNV12, img, cv::COLOR_YUV2BGR_NV12);
gst_buffer_unmap(buffer, &map); // 解除映射
}
else
{
g_print("gst_buffer_map failed!, %d\n", rett);
}
// release sample reference
gst_sample_unref(sample);
}
else
{
g_print("sample is null...\n");
}
return GST_FLOW_OK;
}
推荐一个零声学院免费教程,个人觉得老师讲得不错,
分享给大家:[Linux,Nginx,ZeroMQ,MySQL,Redis,
fastdfs,MongoDB,ZK,流媒体,CDN,P2P,K8S,Docker,
TCP/IP,协程,DPDK等技术内容,点击立即学习: