void TIM3_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_InitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
// Enable clock for TIM3 and GPIOB
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3 | RCC_APB2Periph_GPIOB, ENABLE);
// Initialize GPIOB to output PWM signal
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
// Initialize TIM3 for PWM generation with interrupt on update
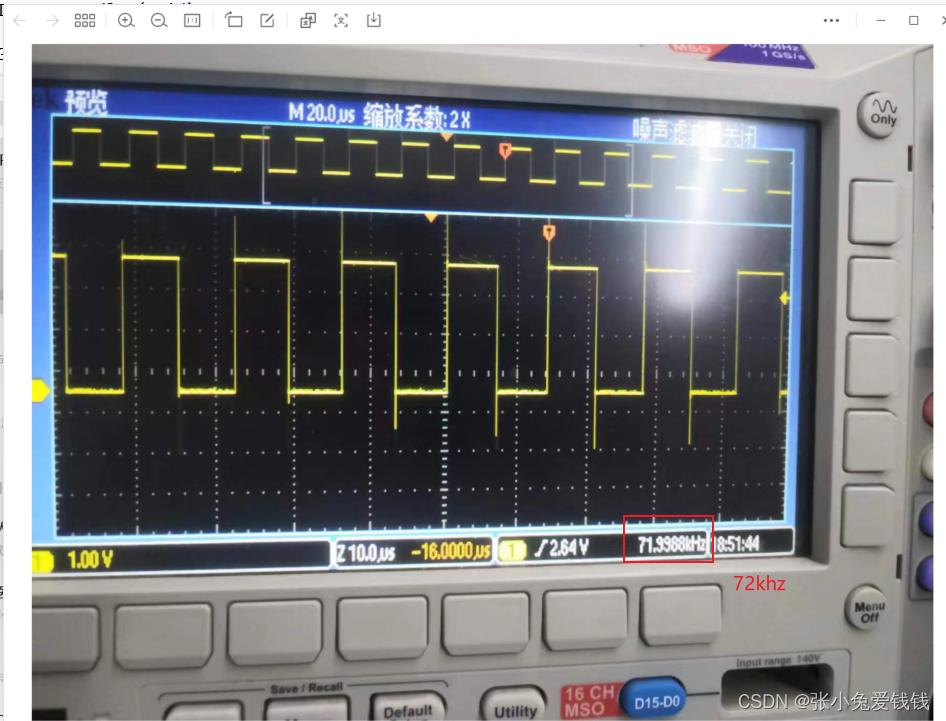
TIM_InitStruct.TIM_Period = 999; // Set PWM frequency to 70kHz (72 MHz / 1000 / 7)
TIM_InitStruct.TIM_Prescaler = 0;
TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_InitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_Pulse = 500; // Duty cycle = 50%
TIM_OC4Init(TIM3, &TIM_OCInitStruct);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) // overflow interrupt
{
printf("龙傲天说,我三岁拳打南山不老院,四岁脚踢北海幼儿园\r\n");
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); // clear interrupt flag
// Handle interrupt by updating PWM duty cycle value
// static uint16_t duty_cycle = 500; // Initial value of 50%
// duty_cycle = duty_cycle < 950 ? duty_cycle + 50 : 0; // Increase duty cycle by 5% every period
// TIM_SetCompare4(TIM3, duty_cycle);
}
int main(void)
{
TIM3_Init();
while (1)
{
printf("剑圣来了,快跑");
}
}