文章目录
- 1. 前言
- 2. 评估板简介
- 3. 官方驱动
- 3.1 官网驱动的介绍
- 3.2 官方驱动的移植
- 3.3 官方驱动的使用
- 4. 参考资料
1. 前言
本篇文章是TLD7002学习笔记的第二篇,主要是介绍如何使用S32K144驱动TLD7002-16ES。为此,笔者做了一套基于TLD7002-16ES的评估板,用于调试和评估TLD7002-16ES。
2. 评估板简介
整个评估板的框图如下所示:
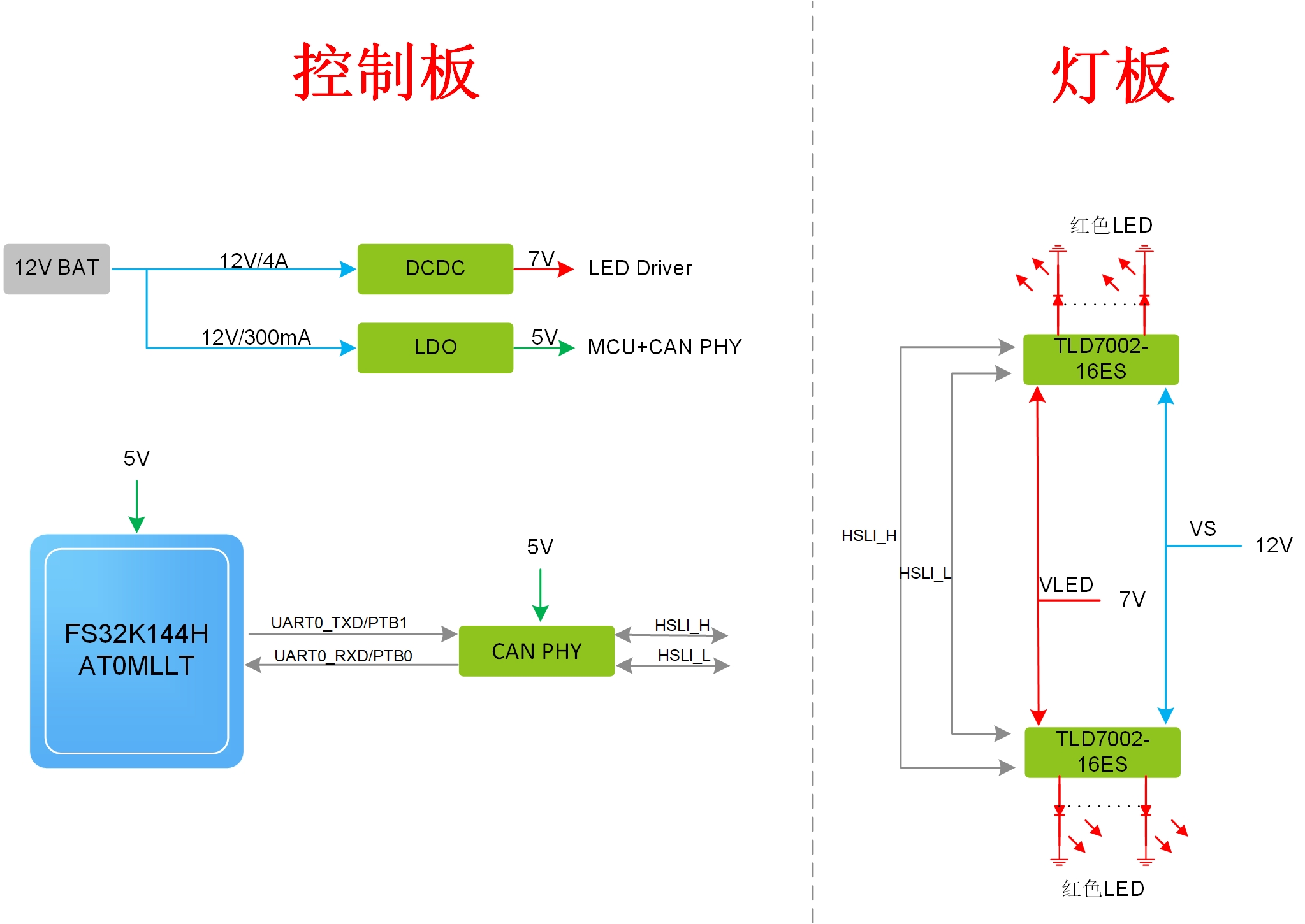
控制板主要由MCU、CAN收发器、DCDC和LDO组成:
- MCU选用了笔者熟悉的S32K144,方便进行软件调试
- MCU加上CAN收发器用于和TLD7002进行HSLI通信(也是一种uart over can的通信)
- LDO用于给MCU和CAN收发器供电
- DCDC用于给灯板供7V电
灯板主要由TLD7002-16ES和LED灯珠组成:
- VS用于整体芯片供电,供电范围为6-20V,该板12V供电
- VLED用于LED灯珠的阳极供电,供电范围为2-20V,该板使用7V供电
- HSLI用于和控制板之间的通信
- 同时还预留了GPIN0用于烧录芯片时使用,框图未标出
3. 官方驱动
3.1 官网驱动的介绍
驱动下载地址:
- TLD7002-16ES Device Driver - Infineon Developer Center
下载之后获取的是一个压缩包,解压之后的文件目录如下:
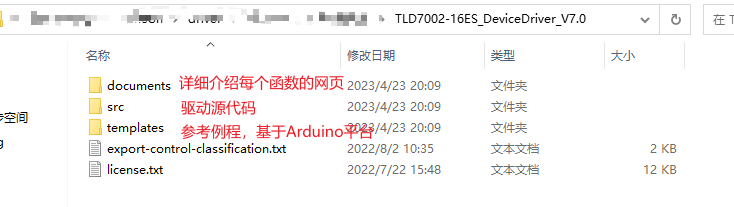
这三个文件夹,有用的是src文件夹;templates文件夹因为里面的例程是基于Arduino平台,对直接使用单片机的参考意义不大;因为源文件每个函数都有详细的注释,所以documents里面的文件也用不上。
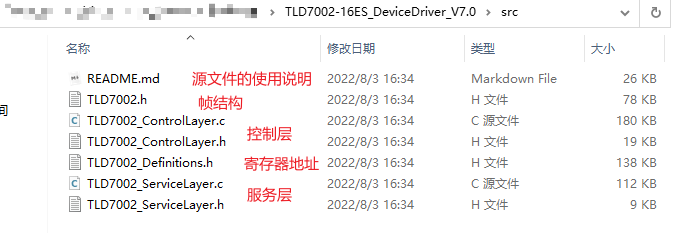
打开src文件夹,所有的文件如下:
对应的TLD7002-16ES的驱动架构如下:
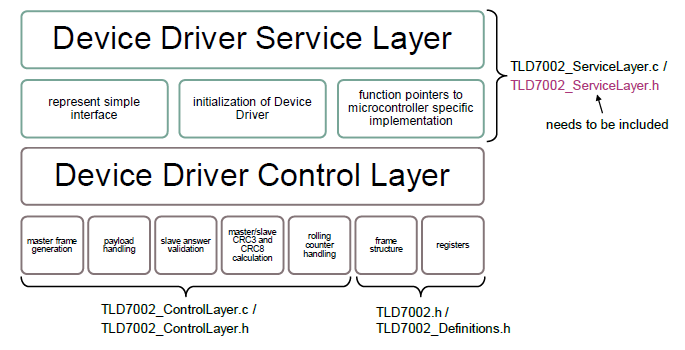
- TLD7002_Definition.h 里面都是关于寄存器的详细定义
- TLD7002.h 里面是其他层需要用到(如帧结构)的结构体等变量的定义
- TLD7002_ControlLayer.c/TLD7002_ControlLayer.h 主要是准备帧的组成元素,如CRC校验,滚动码,负载处理等。
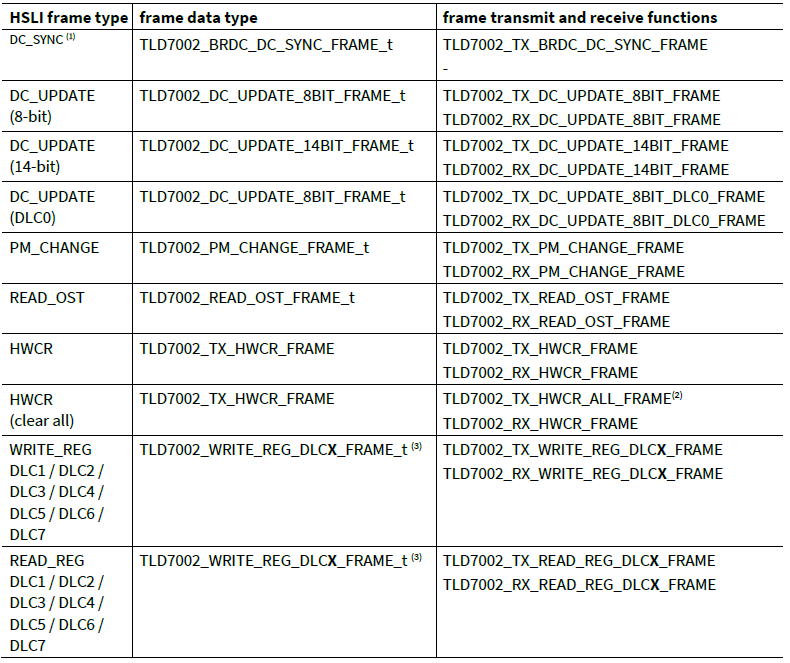
- TLD7002_ControlLayer.c/TLD7002_ControlLayer.h 实现各种帧的收发函数,提供API给外部调用,主要的API如下:
3.2 官方驱动的移植
官方驱动实现的功能上文已经介绍,细心的读者肯定会有疑问,为啥没有看到UART收发功能在某个文件实现?
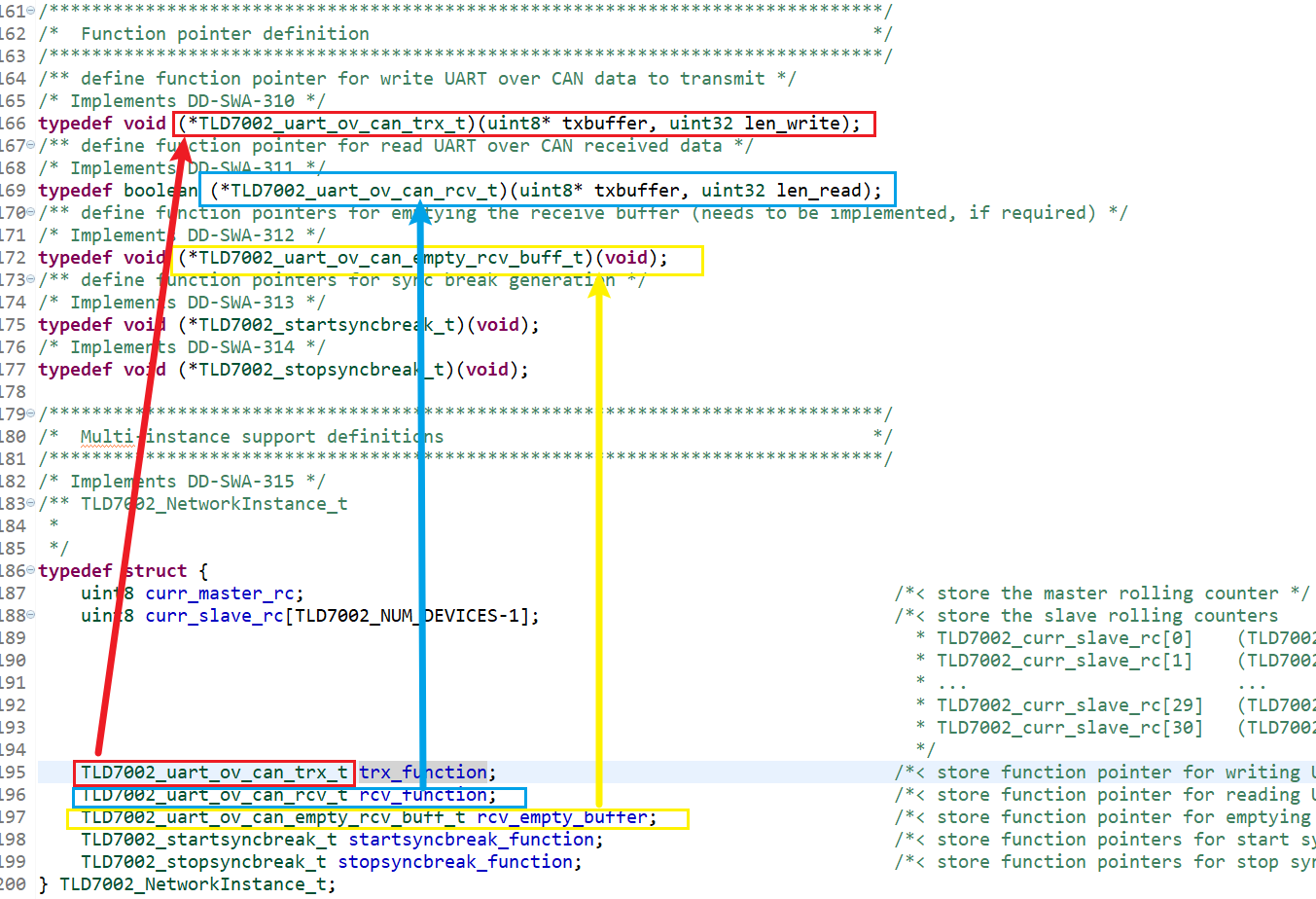
其实官方驱动里确实没有具体实现UART收发功能,但是在TLD7002_ControlLayer.h文件里提供了一个结构体类型,里面包含了待用户实现UART收发功能的函数指针,如下图所示:
下面以S32K144驱动TLD7002-16ES为例介绍下完整的移植过程。
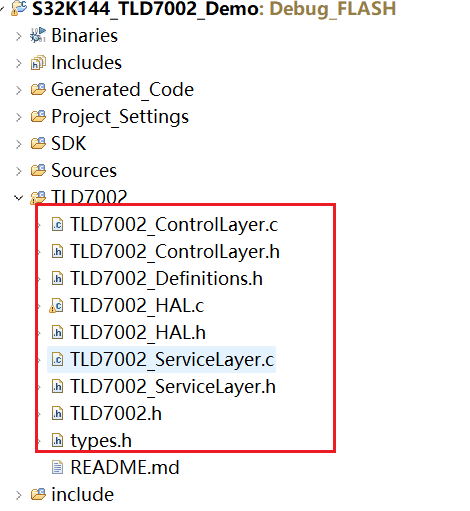
- 新建S32K144工程,并将TLD7002-16ES的驱动文件包含进去,新增TLD7002_HAL.c/TLD7002_HAL.h文件用于实现UART的收发功能等,新增types.h文件用于实现驱动文件里面的数据类型和S32K1的SDK数据类型兼容。如下图所示:
- 在types.h实现数据类型兼容:
#include "stdbool.h"
#include "stdint.h"
#define TRUE true
#define FALSE false
typedef uint8_t uint8;
typedef uint16_t uint16;
typedef uint32_t uint32;
typedef bool boolean;
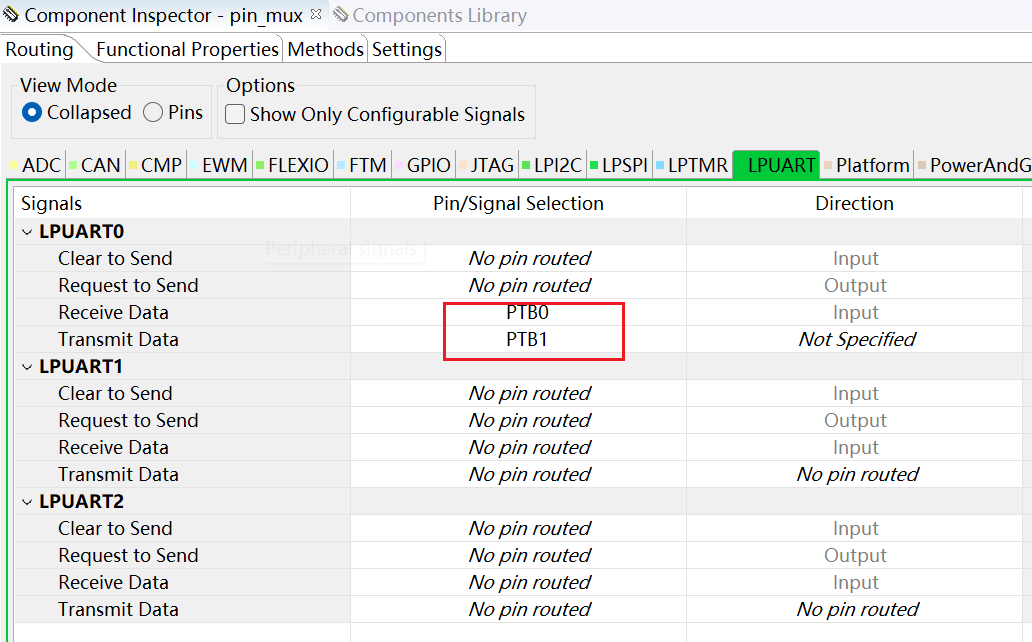
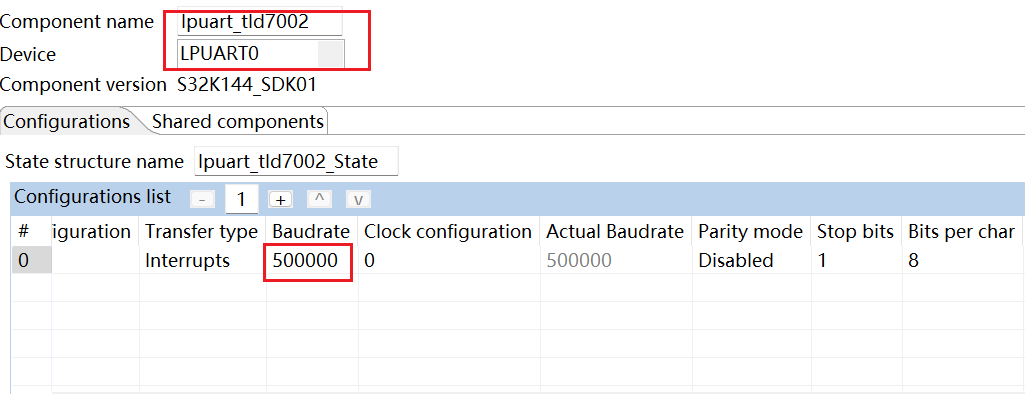
- 新增串口组件进行配置,同时在pin_mux组件配置对应的引脚
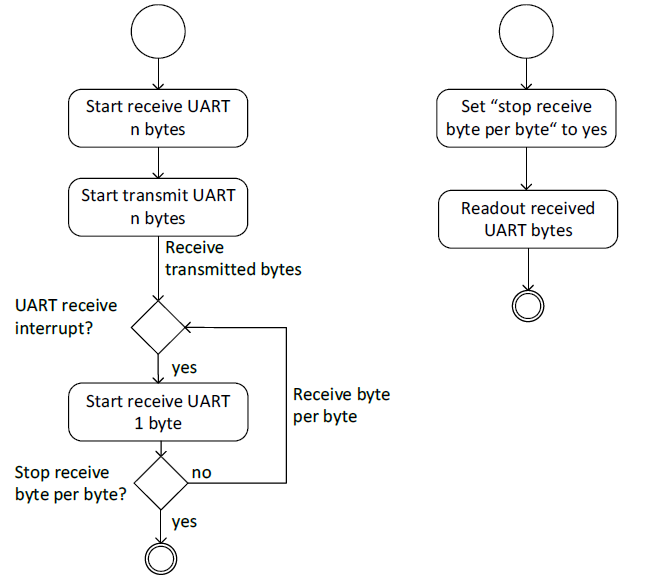
- 基接下来需要在TLD7002_HAL.c/TLD7002_HAL.h实现串口收发,整个的流程图如下:
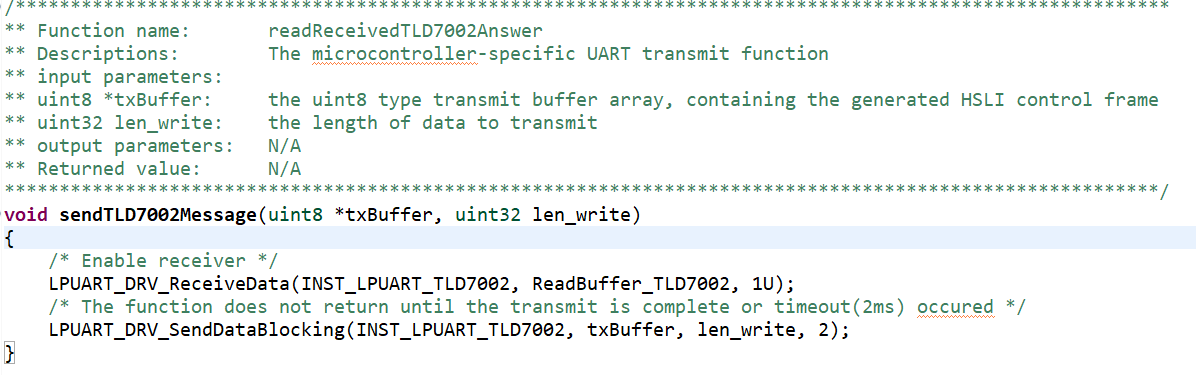
- 在TLD7002_HAL.C中实现UART发送函数,因为CAN收发器具有回环功能,TX发出去的数据在RX也能收到,为了接收完整的数据,所以需要提前调用
LPUART_DRV_ReceiveData函数使能接收。实现函数如下所示:
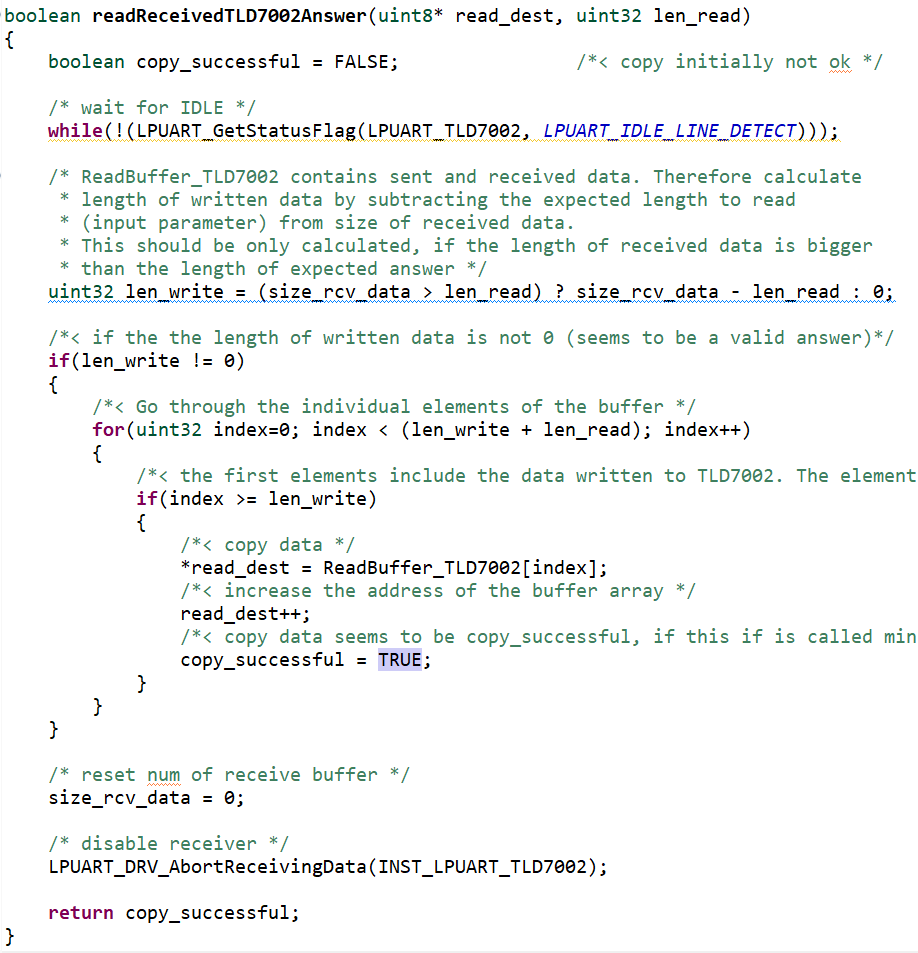
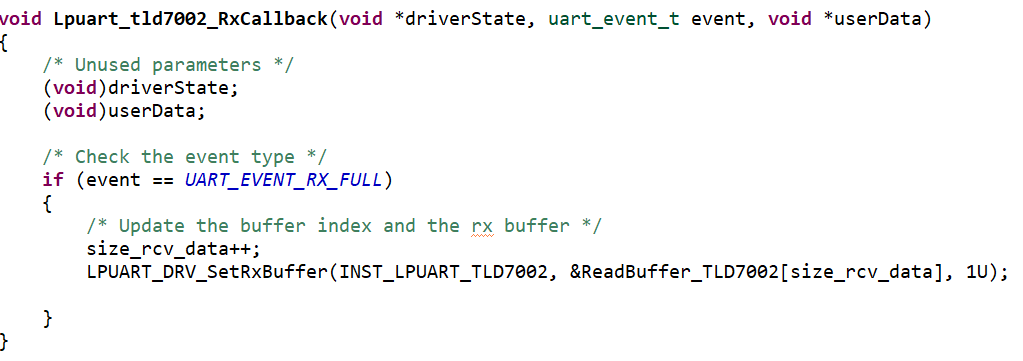
- 然后实现UART接收函数,同时需要和UART中断函数进行配合,如下所示:
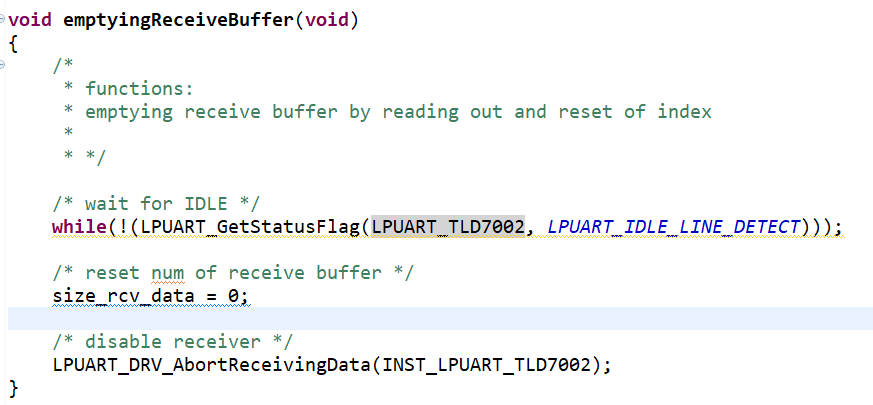
- 使用广播地址的情况下TLD7002不会回复数据,但是MCU的RX因为CAN收发器的原因仍然会收到自身发的数据,所以需要在接收完数据后进行计数器的复位同时丢弃这部分数据。针对广播地址的情况,也准备了单独的串口接收函数。
- 接着定义一个结构体,包含这些函数的指针,方便其它函数调用
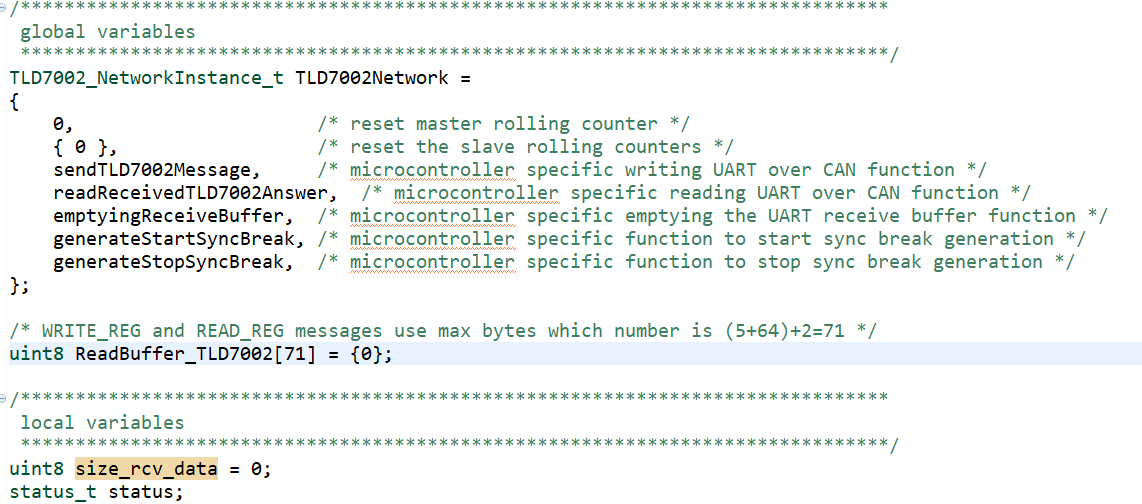
generateStartSyncBreak和generateStopSyncBreak两个函数的作用是结合使用产生一段时间的低电平,从而复位TLD7002-16ES。在使用TLD7002-16ES过程中基本用不到(使用进入init模式的帧命令更多),所以这里就不去实现了。
- 最后在TLD7002_HAL.h文件里增加这些函数的声明。
#if (INST_LPUART_TLD7002==0U)
#define LPUART_TLD7002 LPUART0
#elif (INST_LPUART_TLD7002==1U)
#define LPUART_TLD7002 LPUART1
#else
#define LPUART_TLD7002 LPUART2
#endif
extern TLD7002_NetworkInstance_t TLD7002Network;
void sendTLD7002Message(uint8 *txBuffer, uint32 len_write);
boolean readReceivedTLD7002Answer(uint8* read_dest, uint32 len_read);
void emptyingReceiveBuffer(void);
void generateStartSyncBreak(void);
void generateStopSyncBreak(void);
void Lpuart_tld7002_RxCallback(void *driverState, uart_event_t event, void *userData);
3.3 官方驱动的使用
官方驱动移植好之后,就可以在用户程序中进行调用了。笔者基于自己的做的DEMO实现了呼吸和流水转向功能。
mian函数的代码如下:
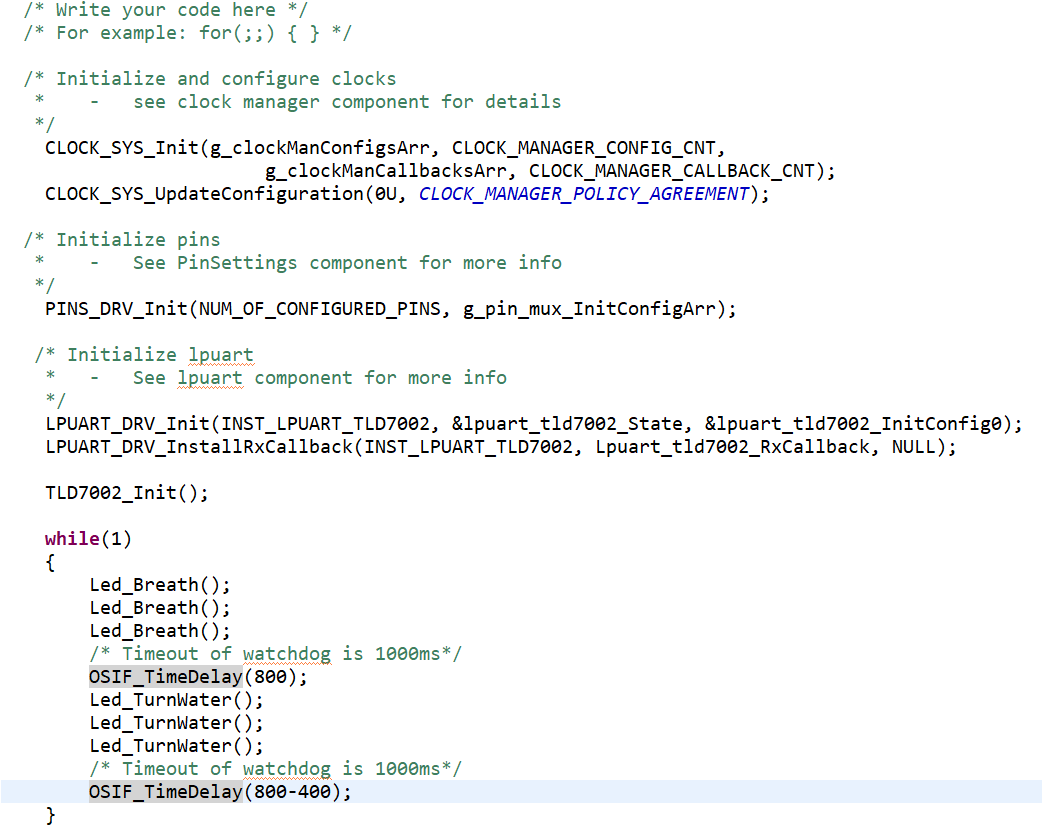
其中,
- 关于
TLD7002_Init()函数的实现如下:
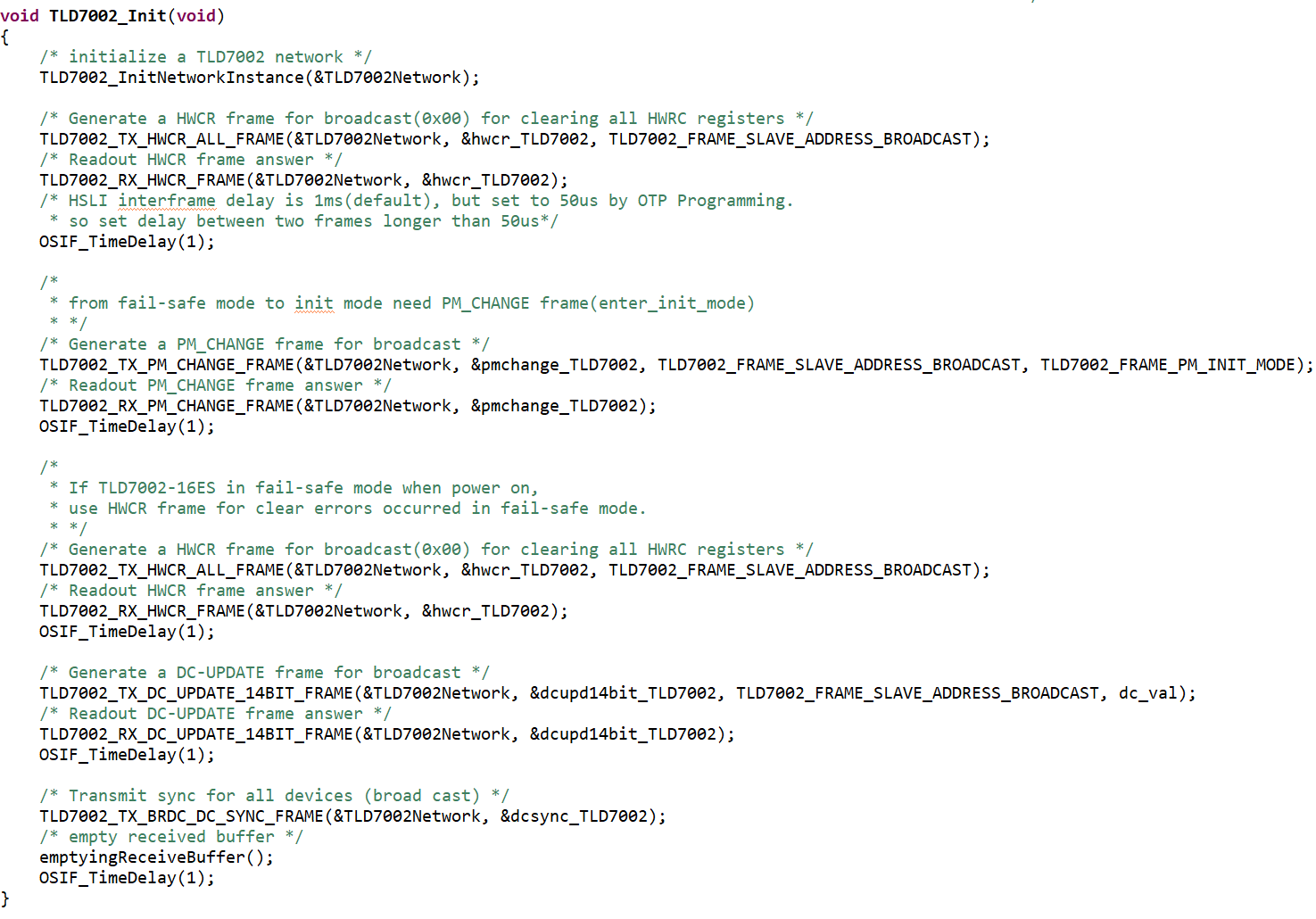
- TLD7002初始化步骤参考的软件使用手册中的流程图如下:

- 关于
Led_Breath()和Led_TurnWater()函数,主要就是调用更新占空比的帧命令,由于比较简单并且代码较多,这里就只展示下Led_TurnWater()。
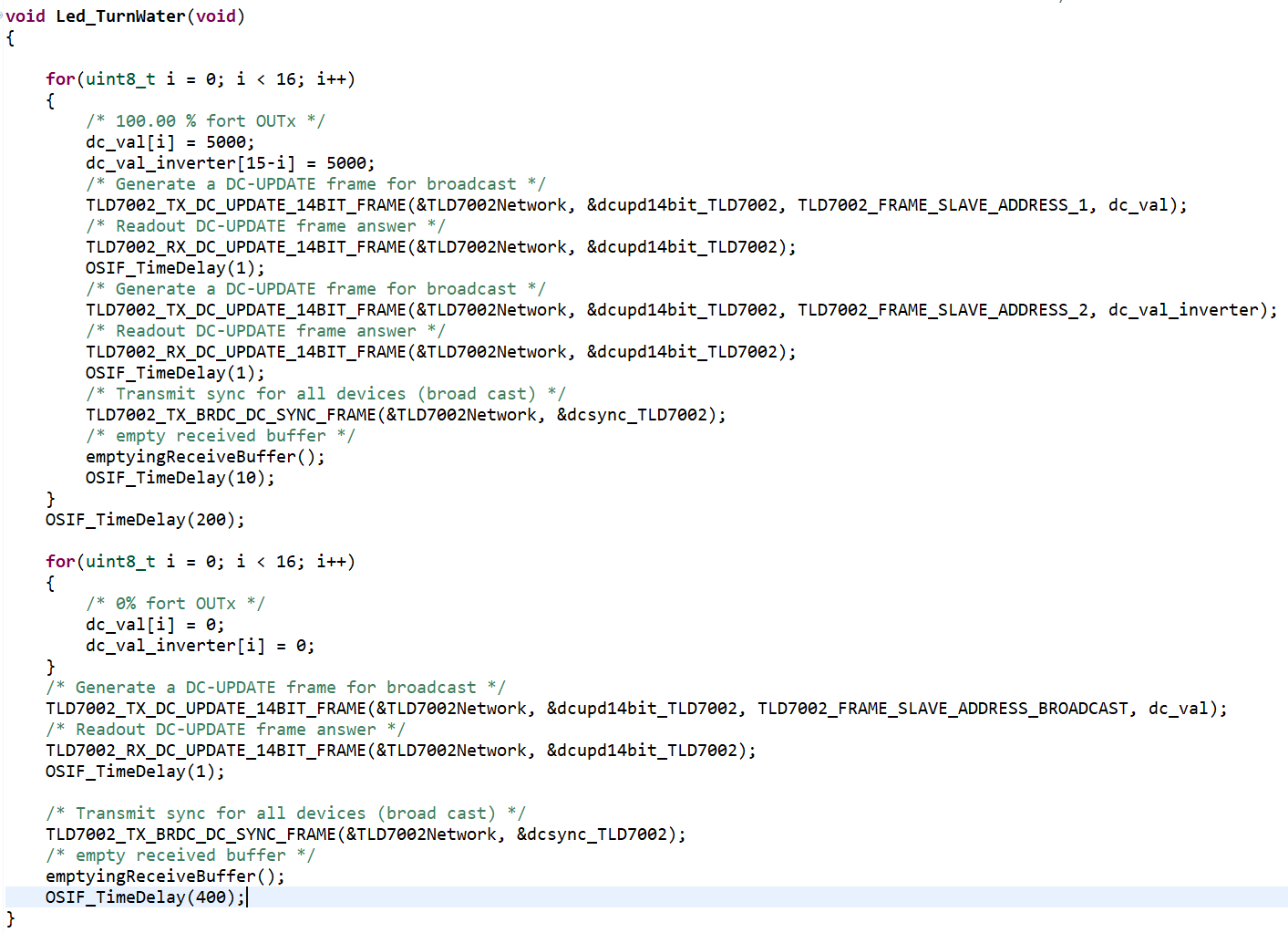
- TLD7002实现动画效果参考的软件使用手册中的流程图如下:
另外,如果想要知道MCU给TLD7002-16ES发完数据之后,TLD7002-16ES的状态,可以参考如下代码实现:
reponse_val_TLD7002 = TLD7002_RX_DC_UPDATE_14BIT_FRAME(&TLD7002Network, &dcupd14bit_TLD7002);
switch(reponse_val_TLD7002)
{ /*< check status of answer */
case TLD7002_FRAME_VAL_NO_ERROR: /*< do something */
break;
case TLD7002_FRAME_VAL_UNDEFINED_ERROR: /*< do something */
break;
case TLD7002_FRAME_VAL_COPY_FRAME_ERROR: /*< do something */
break;
case TLD7002_FRAME_VAL_BROADCAST_ERROR: /*< do something */
break;
case TLD7002_FRAME_VAL_CRC3_ERROR: /*< do something */
break;
case TLD7002_FRAME_VAL_RC_ERROR: /*< do something */
break;
}
笔者在调试时遇到的注意事项也简单分享下:
- 没有进行过OTP烧录的TLD7002-16ES是无法进入active mode,也即没法正常工作。推荐将所有OTP寄存器烧录完成后再使用MCU进行控制。
- OTP寄存器没有完全烧录的芯片只能接收到广播地址和0x01。OTP区域的CRC寄存器的值一定要写对,否则该器件只能接收到广播地址。
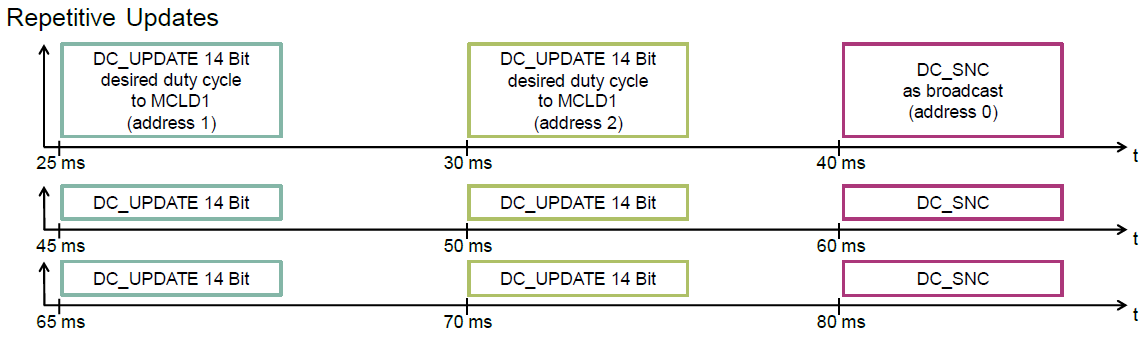
- 只调用DC_UPDATE命令是不会更改TLD7002的占空比的,只有调用了DC_SYNC命令之后,TLD7002-16es才会在下一个PWM周期开始时更改占空比。
- 如果需要短时间内频繁使用DC_UPDATE命令,如实现灯的呼吸,建议使用器件地址,不要使用广播地址。否则TLD7002-16ES会进入fail-safe模式。
TLD7002-16ES的软件驱动部分就介绍到这里了。因为Infenion官方提供的驱动比较完善,所以用户在芯片驱动层不需要花太多时间,只需要专注应用层即可。如果有读者想要对TLD7002-16ES的软件驱动做更多的了解,建议深入阅读官方提供的驱动源码。
4. 参考资料
-
TLD7002-16LITE_KIT User Guide
-
TLD7002-16ES software design and device driver