环境配置:
- ubuntu18.04
- pcl1.11.0
下载源码并解压
tar -zxvf pcl-pcl-1.11.0.tar.gz

进入解压后的文件夹、建立bulid文件夹并进入该文件夹

安装依赖
sudo apt-get update
使用apt-get包管理器安装CMake:
sudo apt-get install cmake

使用apt-get包管理器安装C++编译器
sudo apt-get install g++
 使用apt-get包管理器安装Eigen库
使用apt-get包管理器安装Eigen库
sudo apt-get install libeigen3-dev


使用apt-get包管理器安装FLANN库
sudo apt-get install libflann-dev

使用apt-get包管理器安装PCAP库
sudo apt-get install libpcap-dev

使用apt-get包管理器安装OpenGL库
sudo apt-get install libglu1-mesa-dev freeglut3-dev mesa-common-dev
使用apt-get包管理器安装Boost库
sudo apt-get install libboost-all-dev
使用apt-get包管理器安装GLEW库
sudo apt-get install libglew-dev

使用apt-get包管理器安装PNG库
sudo apt-get install libpng-dev

使用apt-get包管理器安装Qhull库
sudo apt-get install libqhull-dev

安装 pcl-tools
sudo apt install pcl-tools
重新运行 CMake 来重新配置项目
cmake ..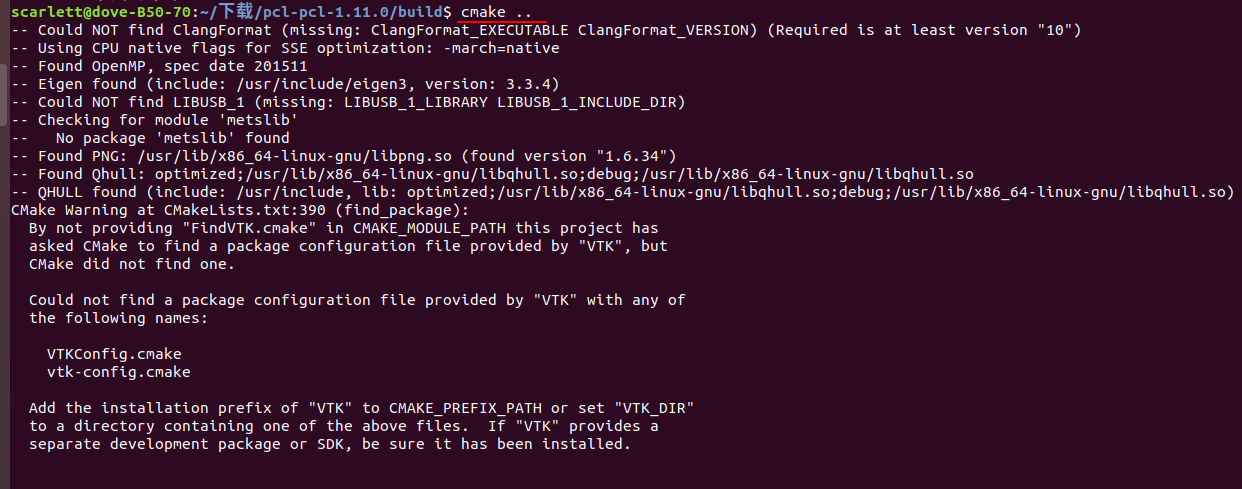


进行编译
4为内核数,按自己的cpu内核数填写,不写数字默认使用全部核心编译
make -j4
 安装
安装
sudo make -j4 install 

测试是否成功
找一个test文件中的PCD点云文件,输入以下代码查看,打开窗口看到logo点云即为成功安装
pcl_viewer test/pcl_logo.pcd

PS:The viewer window provides interactive commands; for help, press 'h' or 'H' from within the window.
这个输出是指PCL Viewer窗口提供交互式命令,可以通过在窗口内按下'h'或'H'键来获取帮助。PCL Viewer是一个可视化工具,用于查看和操作点云数据,支持许多不同的渲染和交互选项。
当您打开PCL Viewer窗口后,如果需要了解可用的交互式命令和选项,可以按下'h'或'H'键进行查看。这将显示一个帮助菜单,其中包含所有可用的命令和选项以及它们的说明。您可以使用这些命令和选项来缩放、旋转、平移、选择、处理和导出点云数据等操作。