先说opencv-contrib-python==4.7.0.72时,aruco下面带曲线,但是程序也能跑,可以跑检测的,对比4.6版本需要改三个函数
| 4.6装opencv-contrib-python | 4.7装opencv-contrib-python | |
| 1 | cv2.aruco.Dictionary_get() | cv2.aruco.getPredefinedDictionary |
| 2 | cv2.aruco.DetectorParameters_create | cv2.aruco.DetectorParameters |
| 3 | cv2.aruco.drawAxis | cv2.drawFrameAxes |
| 4 | cv2.aruco.detectMarkers | cv2.aruco.ArucoDetector.detectMarkers |
备注:第4个程序是不装contrib时,只装opencv-python库时用到的,前面的文章提到过,aruco的库在4.7版本中,已经放到主库了,只用opencv-python的库即可,但是用cv2.aruco.ArucoDetector.detectMarkers这个函数的时候报错,所以,还是卸载掉了opencv-python,安装了opencv-contrib-python的库。
哪位高手在4.7版本中没有用contrib库,欢迎留言
python3.9的环境中安装opencv-contrib-python==4.7.0.72时代码
下面程序中引用的“标定文件.yaml”,在上一篇文章中有详细说明及代码,可以直接运行得到
import numpy as np
import time
import cv2
import cv2.aruco as aruco
#这个程序是好的,可以跑的
#相机内参
import yaml
file_path = ("./标定文件.yaml")
# file_path = ("/home/pi/PycharmProjects/pythonProject/opencv_test/变焦相机标定参数.yaml")
###加载文件路径###
with open(file_path, "r") as file:
parameter = yaml.load(file.read(), Loader=yaml.Loader)
mtx = parameter['camera_matrix']
dist = parameter['dist_coeff']
camera_u = parameter['camera_u']
camera_v = parameter['camera_v']
mtx = np.array(mtx)
dist = np.array(dist)
#打开笔记本摄像头
cap = cv2.VideoCapture(0,cv2.CAP_DSHOW)
font = cv2.FONT_HERSHEY_SIMPLEX #font for displaying text (below)
#num = 0
while True:
start = time.time()
ret, frame = cap.read()
# operations on the frame come here
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_4X4_1000)
parameters = aruco.DetectorParameters()
#lists of ids and the corners beloning to each id
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,
aruco_dict,
parameters=parameters)
# if ids != None:
if ids is not None:
rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, mtx, dist)
# Estimate pose of each marker and return the values rvet and tvec---different
# from camera coeficcients
(rvec-tvec).any() # get rid of that nasty numpy value array error
# aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #Draw Axis
# aruco.drawDetectedMarkers(frame, corners) #Draw A square around the markers
for i in range(rvec.shape[0]):
cv2.drawFrameAxes(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.03)
aruco.drawDetectedMarkers(frame, corners)
#显示ID,rvec,tvec, 旋转向量和平移向量
cv2.putText(frame, "Id: " + str(ids), (10,40), font, 0.5, (0, 0, 255),1,cv2.LINE_AA)
cv2.putText(frame, "rvec: " + str(rvec[i, :, :]), (10, 60), font, 0.5, (0, 255, 0), 2, cv2.LINE_AA)
cv2.putText(frame, "tvec: " + str(tvec[i, :, :]), (10,80), font, 0.5, (0, 0, 255), 1, cv2.LINE_AA)
else:
cv2.putText(frame, "No Ids", (10,64), font, 1, (0,255,0),2,cv2.LINE_AA)
end = time.time()
# 计算帧率并显示
cv2.putText(frame, "rate: " + str(1 / (end-start )), (10, 120), font, 0.5, (0, 0, 255), 1, cv2.LINE_AA)
cv2.imshow("frame",frame)
key = cv2.waitKey(1)
if key == 27: # 按esc键退出
print('esc break...')
cap.release()
cv2.destroyAllWindows()
break
if key == ord(' '): # 按空格键保存
# num = num + 1
# filename = "frames_%s.jpg" % num # 保存一张图像
filename = str(time.time())[:10] + ".jpg"
cv2.imwrite(filename, frame)
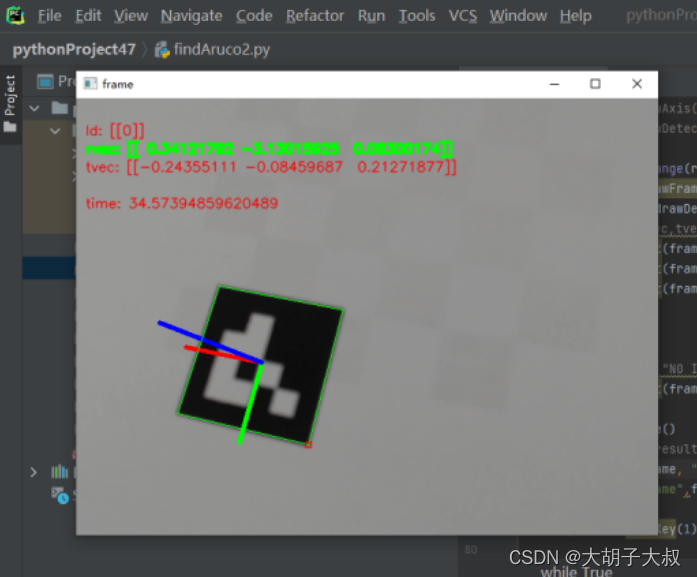
检测效果图
在python3.9的环境中安装opencv-contrib-python==4.5.4.60时,代码
import numpy as np
import time
import cv2
import cv2.aruco as aruco
#相机内参
import yaml
file_path = ("./标定文件.yaml")
# file_path = ("/home/pi/PycharmProjects/pythonProject/opencv_test/变焦相机标定参数.yaml")
###加载文件路径###
with open(file_path, "r") as file:
parameter = yaml.load(file.read(), Loader=yaml.Loader)
mtx = parameter['camera_matrix']
dist = parameter['dist_coeff']
camera_u = parameter['camera_u']
camera_v = parameter['camera_v']
mtx = np.array(mtx)
dist = np.array(dist)
#windows
cap = cv2.VideoCapture(0,cv2.CAP_DSHOW)
font = cv2.FONT_HERSHEY_SIMPLEX #font for displaying text (below)
#num = 0
while True:
start = time.time()
ret, frame = cap.read()
# operations on the frame come here
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_4X4_1000)
parameters = aruco.DetectorParameters_create()
#lists of ids and the corners beloning to each id
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,
aruco_dict,
parameters=parameters)
if ids is not None:
rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, mtx, dist)
# Estimate pose of each marker and return the values rvet and tvec---different
# from camera coeficcients
(rvec-tvec).any() # get rid of that nasty numpy value array error
# aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #Draw Axis
# aruco.drawDetectedMarkers(frame, corners) #Draw A square around the markers
for i in range(rvec.shape[0]):
cv2.drawFrameAxes(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.03)
aruco.drawDetectedMarkers(frame, corners)
#显示ID,rvec,tvec, 旋转向量和平移向量
cv2.putText(frame, "Id: " + str(ids), (10,40), font, 0.5, (0, 0, 255),1,cv2.LINE_AA)
cv2.putText(frame, "rvec: " + str(rvec[i, :, :]), (10, 60), font, 0.5, (0, 255, 0), 2, cv2.LINE_AA)
cv2.putText(frame, "tvec: " + str(tvec[i, :, :]), (10,80), font, 0.5, (0, 0, 255), 1, cv2.LINE_AA)
else:
cv2.putText(frame, "No Ids", (10,64), font, 1, (0,255,0),2,cv2.LINE_AA)
end = time.time()
# 计算并显示帧率
cv2.putText(frame, "rate: " + str(1 / (end-start )), (10, 120), font, 0.5, (0, 0, 255), 1, cv2.LINE_AA)
cv2.imshow("frame",frame)
key = cv2.waitKey(1)
if key == 27: # 按esc键退出
print('esc break...')
cap.release()
cv2.destroyAllWindows()
break
if key == ord(' '): # 按空格键保存
# num = num + 1
# filename = "frames_%s.jpg" % num # 保存一张图像
filename = str(time.time())[:10] + ".jpg"
cv2.imwrite(filename, frame)
备注,安装指定版本的python命令
pip install opencv-contrib-python==4.5.4.60 -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose
pip install opencv-contrib-python==4.7.0.72 -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose