硬件:
STM32F407ZGT6开发板
软件:
VSCode
arm-none-eabi-gcc
openOCD
st-link
在github搜到一个在NUCLEO-F429ZI开发板上移植ptpd的example,因为和F407差别很小,所以就打算用这个demo移植到手头的开发板上。因为目前只需要slave,所以只调试了slave。据介绍,master好像原作者没有充分测试过。
源项目链接:
https://github.com/mpthompson/stm32_ptpd
1.修改ETH引脚
projects/nucleo_ptpd_slave/src/hal_system.c中 HAL_ETH_MspInit 函数里有ETH引脚初始化:
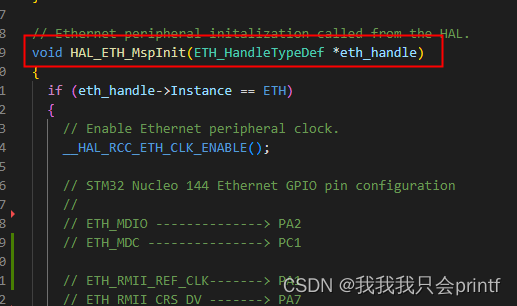
根据自己手头板子调整引脚初始化,其实可以先用STM32CubeMX生成一个测试工程,测试一下板子硬件是好的再移植是最正确的流程。关于ETH硬件测试工程可以参考我之前的博文:
(GCC)从零开始的ETH开发--STM32F407ZGTX_我我我只会printf的博客-CSDN博客
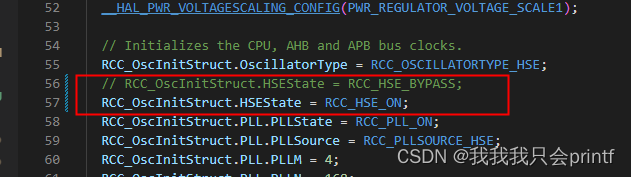
这里记得在初始化完成后,使用复位引脚复位PHY。还有原工程是F429,现在改成F407需要修改头文件hal_system.h中:

还有时钟类型需要根据实际修改,一般都是外部晶振:
2.修改makefile
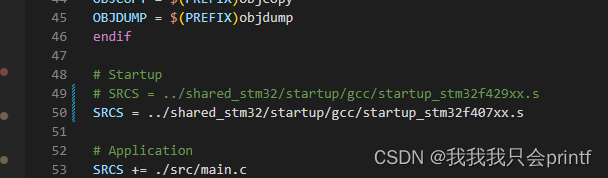
F429和F407启动文件不同,所以需要修改slave工程包含的makefile:
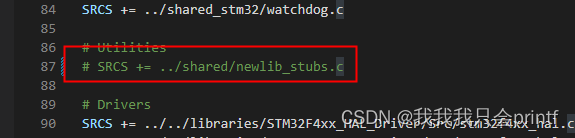
其次删除newlib_stubs.c文件,否则编译后的固件没办法使用。
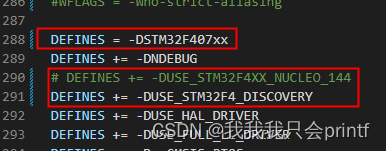
还有修改宏定义:
还有注意修改ld脚本文件,这里我使用的是自己新建的ld文件:

其他修改可有可无,根据自己情况修改。makefile文件如下:
# Makefile for PTPD slave for NUCLEO-F429ZI.
# Project name
NAME = nucleo_ptpd_slave
CPU = -mcpu=cortex-m4
# fpu
FPU = -mfpu=fpv5-d16
# float-abi
FLOAT-ABI = -mfloat-abi=hard
# mcu
MCU = $(CPU) -mthumb $(FPU) $(FLOAT-ABI)
# Outputs
BINMAP = $(NAME).map
BINELF = $(NAME).elf
BINHEX = $(NAME).hex
BINBIN = $(NAME).bin
BINCRC = $(NAME).crc
BINMAP = $(NAME).map
# GNU ARM Embedded Toolchain
PREFIX = arm-none-eabi-
ifdef GCC_PATH
CC = $(GCC_PATH)/$(PREFIX)gcc
CXX = $(GCC_PATH)/$(PREFIX)g++
LD = $(GCC_PATH)/$(PREFIX)ld
AR = $(GCC_PATH)/$(PREFIX)ar
AS = $(GCC_PATH)/$(PREFIX)as
NM = $(GCC_PATH)/$(PREFIX)nm
SIZE = $(GCC_PATH)/$(PREFIX)size
A2L = $(GCC_PATH)/$(PREFIX)addr2line
OBJCOPY = $(GCC_PATH)/$(PREFIX)objcopy
OBJDUMP = $(GCC_PATH)/$(PREFIX)objdump
else
CC = $(PREFIX)gcc
CXX = $(PREFIX)g++
LD = $(PREFIX)ld
AR = $(PREFIX)ar
AS = $(PREFIX)as
NM = $(PREFIX)nm
SIZE = $(PREFIX)size
A2L = $(PREFIX)addr2line
OBJCOPY = $(PREFIX)objcopy
OBJDUMP = $(PREFIX)objdump
endif
# Startup
# SRCS = ../shared_stm32/startup/gcc/startup_stm32f429xx.s
SRCS = ../shared_stm32/startup/gcc/startup_stm32f407xx.s
# Application
SRCS += ./src/main.c
SRCS += ./src/hal_system.c
# Application Shared
SRCS += ../shared/event.c
SRCS += ../shared/outputf.c
SRCS += ../shared/peek.c
SRCS += ../shared/reboot.c
SRCS += ../shared/shell.c
SRCS += ../shared/syslog.c
SRCS += ../shared/telnet.c
SRCS += ../shared/uptime.c
# Application Shared Nucleo
SRCS += ../shared_nucleo/buttons.c
SRCS += ../shared_nucleo/leds.c
# Application Shared STM32
SRCS += ../shared_stm32/blink.c
SRCS += ../shared_stm32/clocks.c
SRCS += ../shared_stm32/console.c
SRCS += ../shared_stm32/delay.c
SRCS += ../shared_stm32/ethptp.c
SRCS += ../shared_stm32/extint.c
SRCS += ../shared_stm32/hardtime.c
SRCS += ../shared_stm32/network.c
SRCS += ../shared_stm32/ntime.c
SRCS += ../shared_stm32/random.c
SRCS += ../shared_stm32/systime.c
SRCS += ../shared_stm32/system_stm32f4xx.c
SRCS += ../shared_stm32/tick.c
SRCS += ../shared_stm32/watchdog.c
# Utilities
# SRCS += ../shared/newlib_stubs.c
# Drivers
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_cortex.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_dma.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_dma_ex.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_eth.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_gpio.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_pwr.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_pwr_ex.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_rcc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_rcc_ex.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_tim.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_tim_ex.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_adc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_crc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_dac.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_dma.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_dma2d.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_exti.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_fmc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_fsmc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_gpio.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_i2c.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_lptim.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_pwr.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_rcc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_rng.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_rtc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_sdmmc.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_spi.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_tim.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_usart.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_usb.c
SRCS += ../../libraries/STM32F4xx_HAL_Driver/Src/stm32f4xx_ll_utils.c
# NT Shell
SRCS += ../../libraries/ntshell-v0.3.1/lib/core/ntlibc.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/util/ntopt.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/core/ntshell.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/util/ntstdio.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/core/text_editor.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/core/text_history.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/core/vtrecv.c
SRCS += ../../libraries/ntshell-v0.3.1/lib/core/vtsend.c
# PTPD
SRCS += ../shared/ptpd/src/ptpd_arith.c
SRCS += ../shared/ptpd/src/ptpd_bmc.c
SRCS += ../shared/ptpd/src/ptpd_main.c
SRCS += ../shared/ptpd/src/ptpd_msg.c
SRCS += ../shared/ptpd/src/ptpd_net.c
SRCS += ../shared/ptpd/src/ptpd_protocol.c
SRCS += ../shared/ptpd/src/ptpd_servo.c
SRCS += ../shared/ptpd/src/ptpd_time.c
SRCS += ../shared/ptpd/src/ptpd_timer.c
# LWIP API
SRCS += ../../libraries/LWIP-2.1.2/src/api/api_lib.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/api_msg.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/err.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/netbuf.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/netdb.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/netifapi.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/sockets.c
SRCS += ../../libraries/LWIP-2.1.2/src/api/tcpip.c
# LWIP Core
SRCS += ../../libraries/LWIP-2.1.2/src/core/altcp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/altcp_alloc.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/altcp_tcp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/def.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/dns.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/inet_chksum.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/init.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ip.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/mem.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/memp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/netif.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/pbuf.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/raw.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/stats.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/sys.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/tcp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/tcp_in.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/tcp_out.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/timeouts.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/udp.c
# LWIP Core IPv4
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/autoip.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/dhcp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/etharp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/icmp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/igmp.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/ip4.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/ip4_addr.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv4/ip4_frag.c
# LWIP Core IPv6
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/dhcp6.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/ethip6.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/icmp6.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/inet6.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/ip6.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/ip6_addr.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/ip6_frag.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/mld6.c
SRCS += ../../libraries/LWIP-2.1.2/src/core/ipv6/nd6.c
# LWIP Netif
SRCS += ../../libraries/LWIP-2.1.2/src/netif/ethernet.c
SRCS += ../../libraries/LWIP-2.1.2/src/netif/lowpan6.c
# LWIP Port
SRCS += ../shared_stm32/lwip_port/ethernetif.c
SRCS += ../shared_stm32/lwip_port/sys_arch.c
# LWIP Apps
SRCS += ../../libraries/LWIP-2.1.2/src/apps/mdns/mdns.c
# RTOS Config
SRCS += ./src/RTX_Config.c
# RTOS Kernel
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_delay.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_evflags.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_evr.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_kernel.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_lib.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_memory.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_mempool.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_msgqueue.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_mutex.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_semaphore.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_system.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_thread.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/rtx_timer.c
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/Source/os_systick.c
# RTOS IRQ
SRCS += ../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source/GCC/irq_cm4f.S
# List of directories that contain source code
SRC_PATHS = $(sort $(dir $(SRCS)))
# Specify the output path
OUTPATH = build
# Create the object list from the sources
OBJS = $(subst .s,.o,$(subst .S,.o,$(subst .c,.o,$(subst .cpp,.o,$(addprefix $(OUTPATH)/, $(notdir $(SRCS)))))))
#$(info SRCS=$(SRCS))
#$(info OBJS=$(OBJS))
#$(info SRC_PATHS=$(SRC_PATHS))
# Where to find source files.
vpath %.cpp $(SRC_PATHS)
vpath %.c $(SRC_PATHS)
vpath %.s $(SRC_PATHS)
vpath %.S $(SRC_PATHS)
# Includes
INCLUDES = -I.
INCLUDES += -I./src
INCLUDES += -I../shared
INCLUDES += -I../shared/ptpd/src
INCLUDES += -I../shared_stm32
INCLUDES += -I../shared_stm32/lwip_port
INCLUDES += -I../shared_nucleo
INCLUDES += -I../../libraries/CMSIS/5.4.0/CMSIS/Core/Include
INCLUDES += -I../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/Include
INCLUDES += -I../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Include
INCLUDES += -I../../libraries/CMSIS/5.4.0/CMSIS/RTOS2/RTX/Source
INCLUDES += -I../../libraries/CMSIS/5.4.0_ST/Device/ST/STM32F4xx/Include
INCLUDES += -I../../libraries/STM32F4xx_HAL_Driver/Inc
INCLUDES += -I../../libraries/LWIP-2.1.2/src
INCLUDES += -I../../libraries/LWIP-2.1.2/src/include
INCLUDES += -I../../libraries/ntshell-v0.3.1/lib/core
INCLUDES += -I../../libraries/ntshell-v0.3.1/lib/util
OPTFLAGS = -O0
MCFLAGS = -mcpu=cortex-m4
MCFLAGS += -mthumb
MCFLAGS += -mlittle-endian
MCFLAGS += -mfpu=fpv4-sp-d16
MCFLAGS += -mfloat-abi=hard
#MCFLAGS += -mapcs-frame
MCFLAGS += -MD
MCFLAGS += -Wall
#FFLAGS = -fno-common
FFLAGS += -ffunction-sections
FFLAGS += -fdata-sections
#FFLAGS += -ffreestanding
#FFLAGS += -fno-builtin
#WFLAGS = -Wno-strict-aliasing
DEFINES = -DSTM32F407xx
DEFINES += -DNDEBUG
# DEFINES += -DUSE_STM32F4XX_NUCLEO_144
DEFINES += -DUSE_STM32F4_DISCOVERY
DEFINES += -DUSE_HAL_DRIVER
DEFINES += -DUSE_FULL_LL_DRIVER
DEFINES += -D__CMSIS_RTOS
DEFINES += -DVECT_TAB_OFFSET=0x0
DEFINES += -DEVR_RTX_DISABLE
LIBS = -lc -lm -lnosys
LIBDIR =
# CFLAGS
CFLAGS = -c -g -gdwarf-2 $(OPTFLAGS) $(MCFLAGS) $(FFLAGS) $(WFLAGS) $(DEFINES) $(INCLUDES)
CXXFLAGS = -c $(OPTFLAGS) $(MCFLAGS) $(FFLAGS) $(WFLAGS) $(DEFINES) $(INCLUDES) -std=c++11
# LINKER FLAGS
LDSCRIPT = nucleo_stm32f407.ld
LDFLAGS = $(MCU) -specs=nano.specs -T$(LDSCRIPT) $(LIBDIR) $(LIBS) -Wl,-Map=$(OUTPATH)/$(BINMAP),--cref -Wl,--gc-sections
###
# Build Rules
.PHONY: all release debug clean
all: $(OUTPATH) release
debug: CFLAGS += -DDEBUG -g -g3 -gdwarf-2 -gdwarf-3
debug: CXXFLAGS += -DDEBUG -g -g3 -gdwarf-2 -gdwarf-3
debug: LDFLAGS += -g -g3 -gdwarf-2 -gdwarf-3
debug: release
# release: $(OUTPATH)/$(BINHEX) $(OUTPATH)/$(BINBIN) $(OUTPATH)/$(BINCRC)
release: $(OUTPATH)/$(BINHEX) $(OUTPATH)/$(BINBIN)
# $(OUTPATH):
# mkdir -p $(OUTPATH)
$(OUTPATH):
mkdir $(OUTPATH)
$(OUTPATH)/$(BINHEX): $(OUTPATH)/$(BINELF)
$(OBJCOPY) -O ihex $< $@
$(OUTPATH)/$(BINBIN): $(OUTPATH)/$(BINELF)
$(OBJCOPY) -O binary $< $@
#$(OUTPATH)/$(BINCRC): $(OUTPATH)/$(BINBIN)
# cksum < $< > $@
##
# C linking is used. If C++ linker is required, change:
# $(CC) $(OBJS) $(LDFLAGS) -o $@
# to:
# $(CXX) $(OBJS) $(LDFLAGS) -o $@
#
$(OUTPATH)/$(BINELF): $(OBJS)
$(CC) $(OBJS) $(LDFLAGS) -o $@
$(SIZE) $(OUTPATH)/$(BINELF)
$(OUTPATH)/%.o : %.cpp
$(CXX) $(CXXFLAGS) $< -o $@
$(OUTPATH)/%.o : %.c
$(CC) $(CFLAGS) $< -o $@
$(OUTPATH)/%.o : %.s
$(CC) $(CFLAGS) $< -o $@
$(OUTPATH)/%.o : %.S
$(CC) $(CFLAGS) $< -o $@
clean:
rm ./$(OUTPATH)
flash: $(OUTPATH)/$(BINHEX)
st-flash --reset --format ihex write $(OUTPATH)/$(BINHEX)
ld文件:
ENTRY(Reset_Handler)
/* Highest address of the user mode stack */
_estack = ORIGIN(RAM) + LENGTH(RAM); /* end of 192K RAM on AHB bus*/
/* Generate a link error if heap and stack don't fit into RAM */
_Min_Heap_Size = 0x200; /* required amount of heap */
_Min_Stack_Size = 0x800; /* required amount of stack */
/* Specify the memory areas */
MEMORY
{
FLASH (rx) : ORIGIN = 0x08000000, LENGTH = 1024K
RAM (rwx) : ORIGIN = 0x20000000, LENGTH = 128K
CCM (rwx) : ORIGIN = 0x10000000, LENGTH = 64K
}
SECTIONS
{
.isr_vector :
{
. = ALIGN(4);
_sflash = .; /* create a global symbol at flash start */
KEEP(*(.isr_vector))
. = ALIGN(4);
} >FLASH
.text :
{
. = ALIGN(4);
*(.text) /* .text sections (code) */
*(.text*) /* .text* sections (code) */
*(.rodata) /* .rodata sections (constants, strings, etc.) */
*(.rodata*) /* .rodata* sections (constants, strings, etc.) */
*(.glue_7) /* glue arm to thumb code */
*(.glue_7t) /* glue thumb to arm code */
*(.eh_frame)
KEEP (*(.init))
KEEP (*(.fini))
. = ALIGN(4);
_etext = .; /* define a global symbols at end of code */
_exit = .;
} >FLASH
.ARM.extab : {
. = ALIGN(4);
*(.ARM.extab* .gnu.linkonce.armextab.*)
. = ALIGN(4);
} >FLASH
.ARM : {
. = ALIGN(4);
__exidx_start = .;
*(.ARM.exidx*)
__exidx_end = .;
. = ALIGN(4);
} >FLASH
.preinit_array :
{
PROVIDE_HIDDEN (__preinit_array_start = .);
KEEP (*(.preinit_array*))
PROVIDE_HIDDEN (__preinit_array_end = .);
} >FLASH
.init_array :
{
PROVIDE_HIDDEN (__init_array_start = .);
KEEP (*(SORT(.init_array.*)))
KEEP (*(.init_array*))
PROVIDE_HIDDEN (__init_array_end = .);
} >FLASH
.fini_array :
{
PROVIDE_HIDDEN (__fini_array_start = .);
KEEP (*(.fini_array*))
KEEP (*(SORT(.fini_array.*)))
PROVIDE_HIDDEN (__fini_array_end = .);
} >FLASH
/* used by the startup to initialize data */
_sidata = .;
/* Initialized data sections goes into RAM, load LMA copy after code */
.data : AT ( _sidata )
{
. = ALIGN(4);
_sdata = .; /* create a global symbol at data start */
*(.data) /* .data sections */
*(.data*) /* .data* sections */
. = ALIGN(4);
_edata = .; /* define a global symbol at data end */
} >RAM
/* Uninitialized data section */
. = ALIGN(4);
.bss :
{
/* This is used by the startup in order to initialize the .bss secion */
_sbss = .; /* define a global symbol at bss start */
__bss_start__ = _sbss;
*(.bss)
*(.bss*)
*(COMMON)
. = ALIGN(4);
_ebss = .; /* define a global symbol at bss end */
__bss_end__ = _ebss;
} >RAM
/* User_heap_stack section, used to check that there is enough RAM left */
._user_heap_stack :
{
. = ALIGN(8);
PROVIDE ( end = . );
PROVIDE ( _end = . );
. = . + _Min_Heap_Size;
. = . + _Min_Stack_Size;
. = ALIGN(8);
} >RAM
/* Remove information from the compiler libraries */
/DISCARD/ :
{
libc.a ( * )
libm.a ( * )
libgcc.a ( * )
}
.ARM.attributes 0 : { *(.ARM.attributes) }
}
注意我使用的gcc版本是:
gcc version 10.3.1 20210621 (release) (GNU Arm Embedded Toolchain 10.3-2021.08)
如果你是用同样的版本,可以直接使用上述makefile,否则可能出现编译失败错误。
3.修改串口
串口配置在console.c文件中,因为我使用的串口和 USE_STM32F4_DISCOVERY 这个开发板串口相同,所以我在上文宏定义的地方直接使用了USE_STM32F4_DISCOVERY宏定义,如果你也按上文使用了USE_STM32F4_DISCOVERY宏定义,但是串口又不相同,请修改:
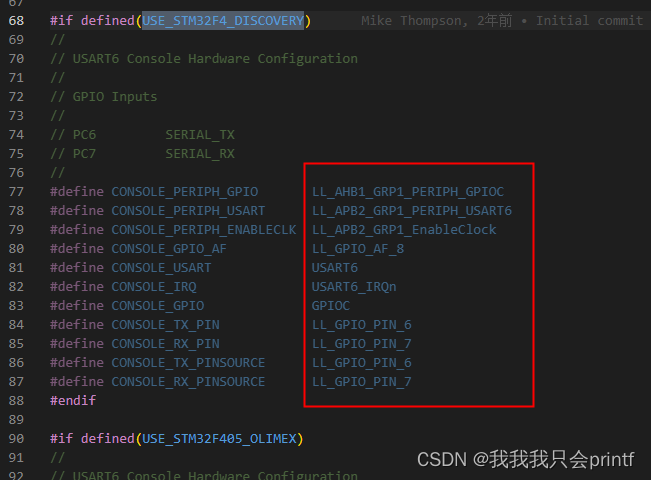
以及中断名称:
GCC下重定向printf请添加:
int _write (int fd, char *pBuffer, int size)
{
for (int i = 0; i < size; i++)
{
if(pBuffer[i] == '\n')
console_putc('\r');
console_putc((int)pBuffer[i]);
}
return size;
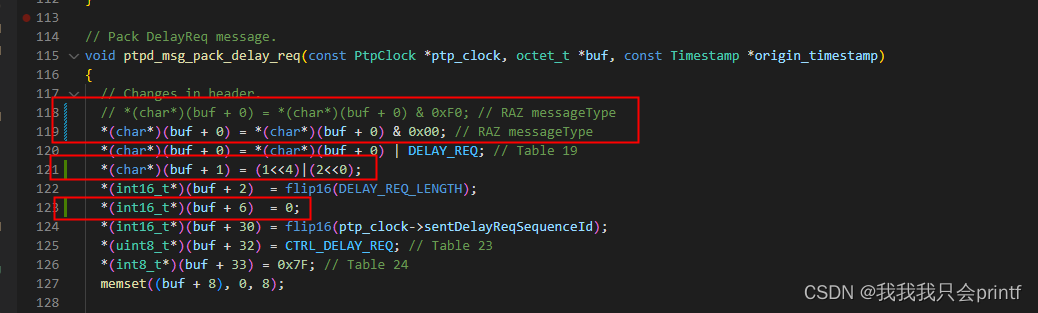
}4.修改报文
注意,此处修改只是我为了和电脑运行的ptp4l之间进行测试,如果不修改报文,ptp4l会认为报文异常。
还有slave和master之间稳定的限幅可以设置的大一点:

5.代码编译
至此所有修改完成,在slave工程目录下make即可:
![]()

6.代码运行
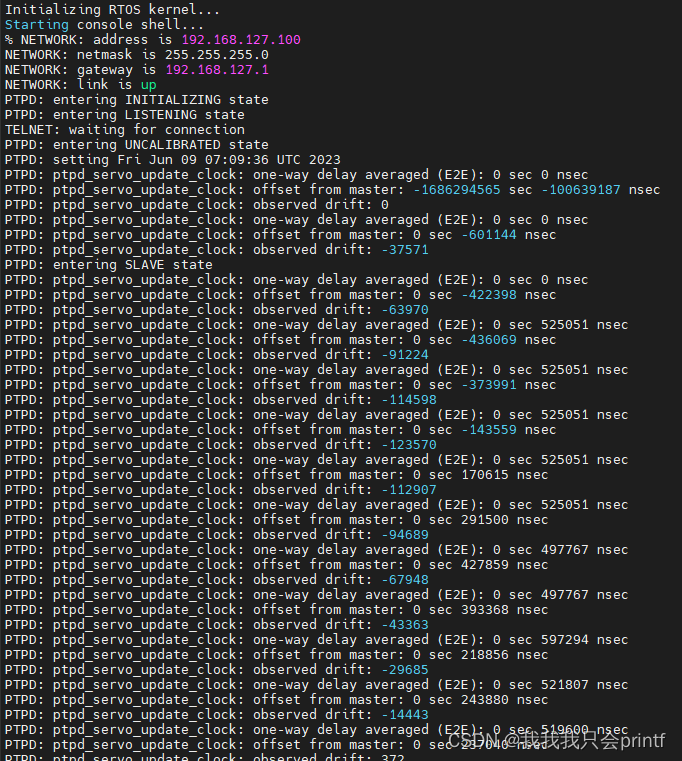
ubuntu下使用
sudo ptp4l -E -4 -S -i ens40 -m
-i后跟网卡名称