//实现与VB模拟鼠标通信,但是噪声很大
//采用输出角度的方式,输出x与z的角度和y与z的角度
//在VB中将屏幕水平与垂直等分1800份(角度*10得到的结果)
//***************************************
// GY-29 ADXL345 IIC测试程序
// 使用单片机STC89C51
// 晶振:11.0592M
// 显示:串口,11.0592M 波特率9600
//****************************************
#include <REG52.H>
#include <math.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
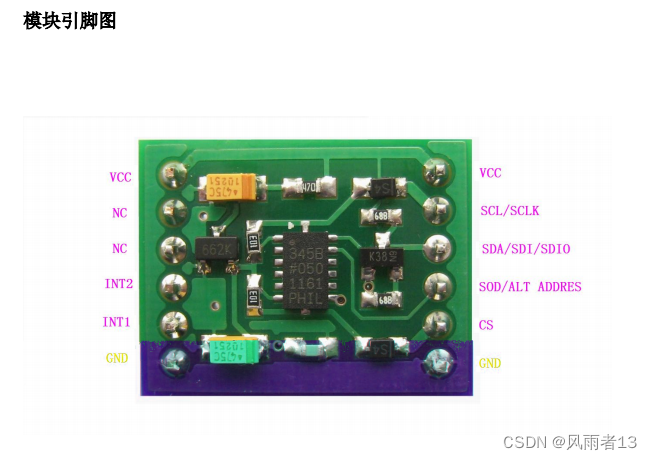
sbit SCL=P1^0; //IIC时钟引脚定义
sbit SDA=P1^1; //IIC数据引脚定义
#define SlaveAddress 0xA6 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改
//ALT ADDRESS引脚接地时地址为0xA6,接电源时地址为0x3A
typedef unsigned char BYTE;
typedef unsigned short WORD;
BYTE BUF[8]; //接收数据缓存区
uchar ge,shi,bai,qian,wan; //显示变量
int dis_data; //变量
void delay(unsigned int k);
void Init_ADXL345(void); //初始化ADXL345
void conversion(unsigned char a,int temp_data); //数据转成字符串
void Single_Write_ADXL345(uchar REG_Address,uchar REG_data); //单个写入数据
uchar Single_Read_ADXL345(uchar REG_Address); //单个读取内部寄存器数据
void Multiple_Read_ADXL345(); //连续的读取内部寄存器数据
//------------------------------------
void Delay5us();
void Delay5ms();
void ADXL345_Start();
void ADXL345_Stop();
void ADXL345_SendACK(bit ack);
bit ADXL345_RecvACK();
void ADXL345_SendByte(BYTE dat);
BYTE ADXL345_RecvByte();
void ADXL345_ReadPage();
void ADXL345_WritePage();
void Init_serialport();
void Send(unsigned char dat);
//-----------------------------------
//*********************************************************
void conversion(unsigned char a,int temp_data)
{
Send(a);
Send(':');
Send(' ');
if(temp_data<0)
{
Send('-');
temp_data=-temp_data;
}
else
Send('+');
wan=temp_data/10000+0x30 ;
temp_data=temp_data%10000; //取余运算
qian=temp_data/1000+0x30 ;
temp_data=temp_data%1000; //取余运算
bai=temp_data/100+0x30 ;
temp_data=temp_data%100; //取余运算
shi=temp_data/10+0x30 ;
temp_data=temp_data%10; //取余运算
ge=temp_data+0x30;
Send(wan);
Send(qian);
Send(bai);
Send(shi);
Send(ge);
Send('\t');
}
/*******************************/
void delay(unsigned int k)
{
unsigned int i,j;
for(i=0;i<k;i++)
{
for(j=0;j<121;j++)
{;}}
}
/**************************************
延时5微秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数,注意时钟过快时需要修改
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5us()
{
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
}
.....
.....
//******单字节写入*******************************************
void Single_Write_ADXL345(uchar REG_Address,uchar REG_data)
{
ADXL345_Start(); //起始信号
ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号
ADXL345_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页
ADXL345_SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页
ADXL345_Stop(); //发送停止信号
}
//********单字节读取*****************************************
uchar Single_Read_ADXL345(uchar REG_Address)
{ uchar REG_data;
ADXL345_Start(); //起始信号
ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号
ADXL345_SendByte(REG_Address); //发送存储单元地址,从0开始
ADXL345_Start(); //起始信号
ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data=ADXL345_RecvByte(); //读出寄存器数据
ADXL345_SendACK(1);
ADXL345_Stop(); //停止信号
return REG_data;
}
//*********************************************************
//
//连续读出ADXL345内部加速度数据,地址范围0x32~0x37
//
//*********************************************************
void Multiple_read_ADXL345(void)
{ uchar i;
ADXL345_Start(); //起始信号
ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号
ADXL345_SendByte(0x32); //发送存储单元地址,从0x32开始
ADXL345_Start(); //起始信号
ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号
for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF
{
BUF[i] = ADXL345_RecvByte(); //BUF[0]存储0x32地址中的数据
if (i == 5)
{
ADXL345_SendACK(1); //最后一个数据需要回NOACK
}
else
{
ADXL345_SendACK(0); //回应ACK
}
}
ADXL345_Stop(); //停止信号
Delay5ms();
}
//*****************************************************************
//初始化ADXL345,根据需要请参考pdf进行修改************************
void Init_ADXL345()
{
Single_Write_ADXL345(0x31,0x00); //测量范围,正负2g,10位模式
Single_Write_ADXL345(0x2C,0x08); //正常模式下(非低功耗,噪声减小)数据速率设定为25hz 参考pdf13页
Single_Write_ADXL345(0x2D,0x08); //选择电源模式 参考pdf24页
Single_Write_ADXL345(0x2E,0x80); //使能 DATA_READY 中断
Single_Write_ADXL345(0x1E,0x00); //X 偏移量 根据测试传感器的状态写入pdf29页
Single_Write_ADXL345(0x1F,0x00); //Y 偏移量 根据测试传感器的状态写入pdf29页
Single_Write_ADXL345(0x20,0x05); //Z 偏移量 根据测试传感器的状态写入pdf29页
}
void Init_serialport()
{
TMOD=0x20; //定时器T1工作于方式2 ,八位自动重装
SCON=0x50; //SCON=0101 0000B,串口工作方式1,允许接收(REN=1)
PCON=0x00; //PCON=0000 0000B,波特率9600
TH1=0xFD ; //根据规定给定时器T1赋初值 使用串口时,用第八位做定时,当他溢出时,就自动重载高八位数据
TL1=0xFD; //根据规定给定时器T1赋初值
TR1=1; //启动定时器T1
REN=1; //允许接收
}
void Send(unsigned char dat)
{
REN=0; //不允许接收
SBUF=dat;
while(TI==0) //等待发送完毕
;
TI=0;
REN=1; //允许接收
}
//函数功能:接收一个字节数据
/***************************************************/
unsigned char Receive(void)
{
unsigned char dat;
while(RI==0) //只要接收中断标志位RI没有被置“1”
; //等待,直至接收完毕(RI=1)
RI=0; //为了接收下一帧数据,需将RI清0
dat=SBUF; //将接收缓冲器中的数据存于dat
return dat;
}
//*********************************************************
//******主程序********
//*********************************************************
void main()
{
uchar devid,dat,i ;
int x=0,y=0,z=0;
int D_x[5],D_y[5],D_z[5];
int sum_x=0,sum_y=0,sum_z=0;
double angle_xz,angle_yz;
delay(500); //上电延时
Init_serialport(); //初始化串口
Init_ADXL345(); //初始化ADXL345
devid=Single_Read_ADXL345(0X00);//读出的数据为0XE5,表示正确,经过测试读出的数据就是0XE5
for(i=0;i<5;i++)
{
D_x[i]=0;
D_y[i]=0;
D_z[i]=0;
}
i=0;
while(1) //循环
{
//Init_ADXL345(); //初始化ADXL345
Multiple_Read_ADXL345(); //连续读出数据,存储在BUF中
x=(BUF[1]<<8)+BUF[0]; //合成数据
y=(BUF[3]<<8)+BUF[2]; //合成数据
z=(BUF[5]<<8)+BUF[4]; //合成数据
sum_x-=D_x[i]; //以下算法含义:取出传感当前值代替他前边的第3个数据,更新sum数据,重新求平均值
sum_y-=D_y[i];
sum_z-=D_z[i];
D_x[i]=x;
D_y[i]=y;
D_z[i]=z;
sum_x+=D_x[i];
sum_y+=D_y[i];
sum_z+=D_z[i];
x=sum_x/5;
y=sum_y/5;
z=sum_z/5;
i++;
if(i==5)
i=0;
angle_xz= atan2((float)z,(float)x) * (180.0 / 3.14159265); // angle in degrees
angle_yz= atan2((float)z,(float)y) * (180.0 / 3.14159265);
angle_xz*=10; //使角度扩大10倍,方便显示
angle_yz*=10;
conversion('X',angle_xz);
conversion('Y',angle_yz);
dat=Receive();
//delay(10);
}
}
![[附源码]计算机毕业设计基于Springboot校园订餐管理系统](https://img-blog.csdnimg.cn/3e2351435fea4031a441e7c680d7fafe.png)