无人机航拍高度与地面采样距离
1.无人机航拍高度与地面采样距离的关系
为搞清无人机航拍高度与地面采样距离的关系,首先需要了解像素与像元之间的细小差别(个人理解)。像素偏重于图片描述,也就是常说的一张图片像素是多少。像元则指一个像素点的实际大小。
对同样大小面积的图片,像元越小,即像素面积越小,进而该场景图片像素数目越大,也就越清晰。
G=[GSD_L,GSD_W];
G=[G_L,G_W];
P=[F,pt_l,pt_w,P_L,P_W];
A=(g_l*g_w)/(pt_l*pt_w)
GSD:地面采样分辨率,是指航拍时每个像元代表的范围大小(假设为垂直拍摄)。
G:拍摄到的地面信息,G_L与G_W分别地面信息的长和宽。
P:相机。F为焦距,pt_l与pt_w表示图片像素数量。P_L,P_W为成像尺寸(假设为方形观测视角)。
令n表示该方向像素个数,a表示一个像素点大小。
P_L=n*a
A:每个像素所表示的实际大小,计算方法如上。
GSD_L=G_L/n
GSD与地面距离和像素关系如上。考虑H>>F,为了方面理解,画图如下:

接下来讲述高度与地面采样距离的关系:
利用小孔成像原理:
G_L=P_L*H/F推出H=G_L*F/P_L
进而:
H=(G_L/n)*(F/a)=F*GSD/a
即该方向上的无人机航拍高度与地面采样率之间的关系。
2.无人机数据采集地面分辨率反推飞行高度
前言
在无人机数据采集的过程中,经常我们很难推算飞行高度与地面分辨率之间的关系,借助于Pix4D官方手册,做一个记录,供参考。
关键词
飞行高度计算需要知道GSD(地面分辨率),相机焦距,相机传感器宽度(mm)和照片宽度(像素);

Sw:真实传感器宽度(mm);
Fr:真实焦距(mm);
H:飞行高度(m);
Dw:一幅图像覆盖地面的真实宽度(飞行方向)(m);
imW:图像宽度(像素);
计算公式
H(m)=(imW x GSD x Fr)/(Sw x 100)
示例:假设获取地面分辨为5,使用的相机的焦距为5,真实相机传感器宽度为6.17,相机宽度为4000像素,那么计算结果为:162.07m;
H(m)=(imW x GSD x Fr)/(Sw x 100)=(4000 x 5 x5)/(6.17 x100)=162.07(m)
以精灵4P参数为例
| 型号 | 相机 | 图像宽度(像素) | 图像高度(像素) | 传感器宽度 | 传感器高度 | 相机焦距 |
|---|---|---|---|---|---|---|
| 精灵4P | FC6310 | 5472 | 3078 | 12.8333 | 7.21875 | 8.8 |
- 那么,如果dji 精灵4P飞行高度为200m,采集到的数据的地面分辨率为5.33cm;
上述相机参数可以通过pix4D软件新建项目,导入照片得到;
3.什么是遥感图像的空间分辨率
遥感图像的空间分辨率是指图像上可以检测最小单元的大小,一般用地面采样间距(Ground Sample Distance, GSD)或像元大小表示。
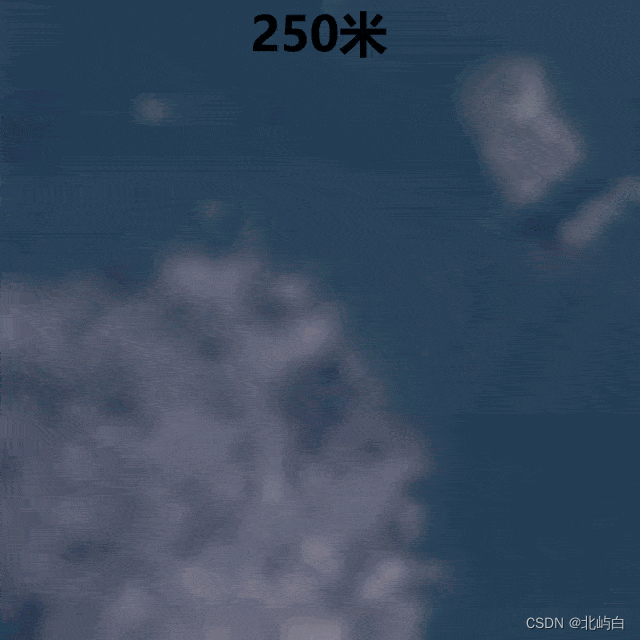
遥感图像的空间分辨率用像元大小表示很容易理解,指数字图像中一个像元(像素)对应地面上的大小。例如10米的空间分辨率图像上,一个像元对应的地面大小就是10米*10米。从这个形象的表示中我们可以知道,空间分辨率的值越小,图像中的细节就越多。比如图中,30米空间分辨率的图像在显示地物细节和信息量方面明显优于250米空间分辨率图像,前者可以清晰分辨旧金山的奥克兰海湾大桥及其阴影,而250米的图像则不行。
表示图像空间分辨率的更专业方式是地面采样间距GSD,GSD是图像像元(单个探测元)在地面上的投影大小。GSD的计算方式为:GSD=(离地面距离传感器单个探测元大小)/焦距。如某一航飞系统,传感器的单个探测元大小0.009mm,光学系统焦距28mm,航高1800m,其GSD=(0.009mm1800m)/28mm=0.6m。
需要注意的是,图像像元大小并不一定会与成像系统的GSD一致,虽然大部分情况下是一致的。例如空中客车(Airbus)公司的Pleiades-1A/1B高分辨率光学卫星全色图像其地面采样间距是0.7米,但是对外提供的图像产品像元大小为0.5米,对外宣传的图像空间分辨率也是0.5米。另外,一般我们会说星下点地面采样间距(空间分辨率),那是因为如图5所示传感器成像的投影点位置是最佳的GSD(分辨率),其它位置的GSD由于h变大会导致GSD变大,这对于大幅宽的图像尤为明显,如MODIS的1000米分辨率图像由于其高达2330千米的幅宽,在图像边缘GSD会变成2000米。对于可以大角度侧摆成像的商业遥感卫星,在大角度成像时其GSD也会大于星下点GSD,例如Worldview-3星下点全色GSD是0.31米,偏离星下点20°时GSD是0.34米。
空间分辨率(或GSD)大小仅表明影像细节的可见程度,不代表能识别或区分同等大小的目标。事实上,当图像空间分辨率为3米,该图像上尺寸为3米大小的目标绝大部分并不能被识别。空间分辨率的值越低,其识别目标的能力越强,但是目标的可分辨程度不完全取决于空间分辨率,目标被识别与目标本身结构和图像背景等因素相关,线性目标(铁路、公路、桥梁等)与单一背景反差较大时,即使目标尺寸小于空间分辨率的值也可以被识别;图4上旧金山奥克兰海湾大桥西段(连接旧金山市区)的宽度为20米,但是在空间分别率60米的图像上可以被分辨,桥梁宽度不到空间分辨率的1/3,这是因为线性的桥梁与海面背景反差比较强烈。
图像空间分辨率随着成像条件(成像几何、成像天气等)是会变的,例如成像时,太阳高度角、方位角、观测角度等发生变化时,同一个卫星系统所拍摄的图像分辨率(或图像清晰度)可能会有肉眼可见的明显差异
参考资料2
参考资料3