目录
.1 简介
1.1 控制器实现
.2 sim.step()
.3 实例
References
.1 简介
control看到下面的图中就是mjtNum类型
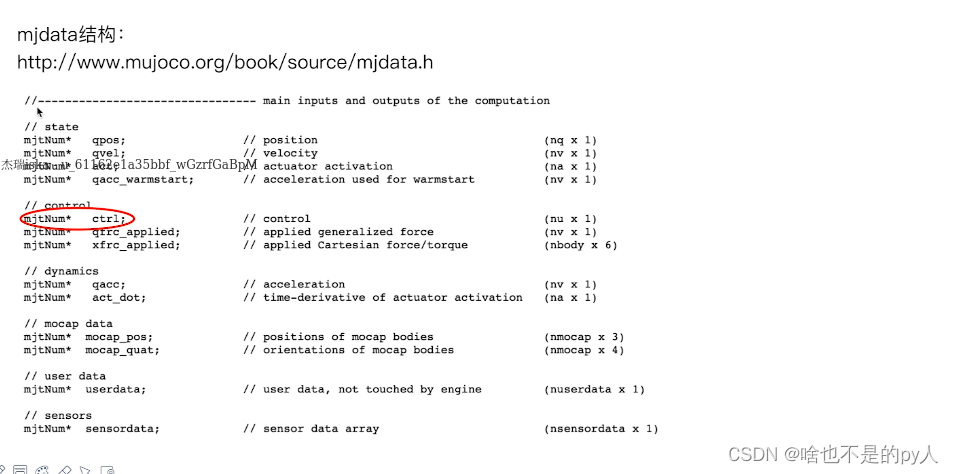
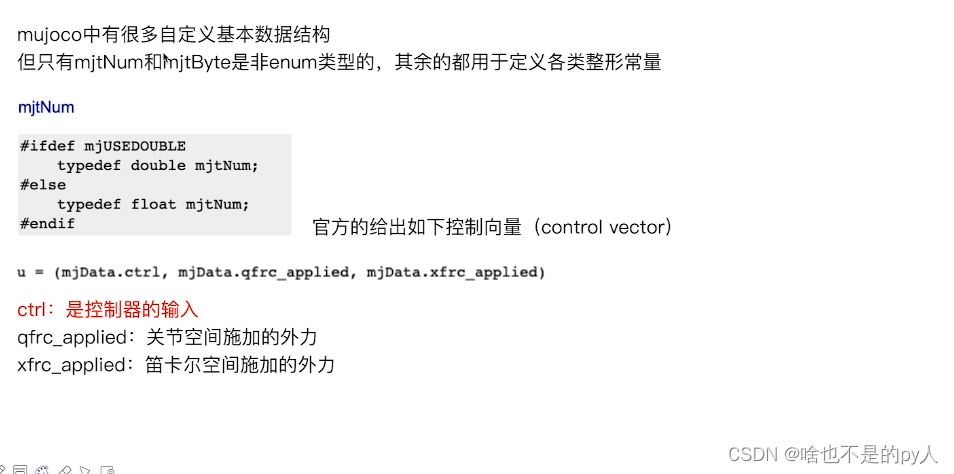
mjtNum实际上就是浮点数
ctrl是底层的输入
外界扰动就是通过上图的qfrc和xfrc来添加的
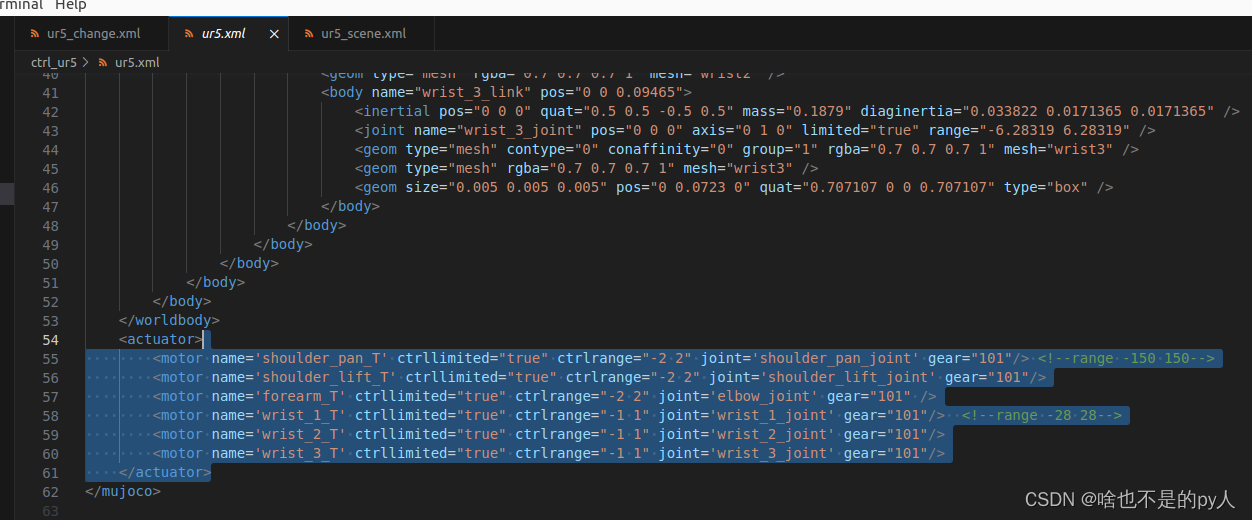
1.1 控制器实现
实际上加上控制器就是xml里添加actuator

joint就是对应由哪个电机控制
motor代表电机
ctrllimited代表的是电机的转动范围有限

这里说明了mujoco的逻辑 是siso就是单输入得到单输出
需要注意的是输入都被保存在变量mjData.ctrl的变量里
force outputs保存在另一个变量里
.2 sim.step()
这个函数做了什么
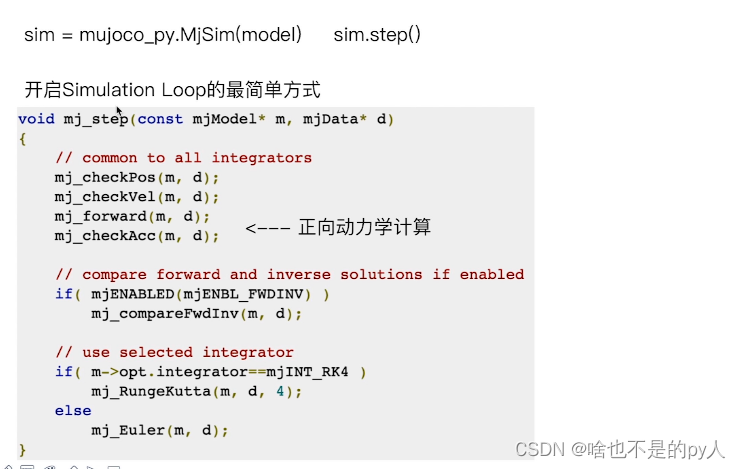
先是检查参数是否在范围内
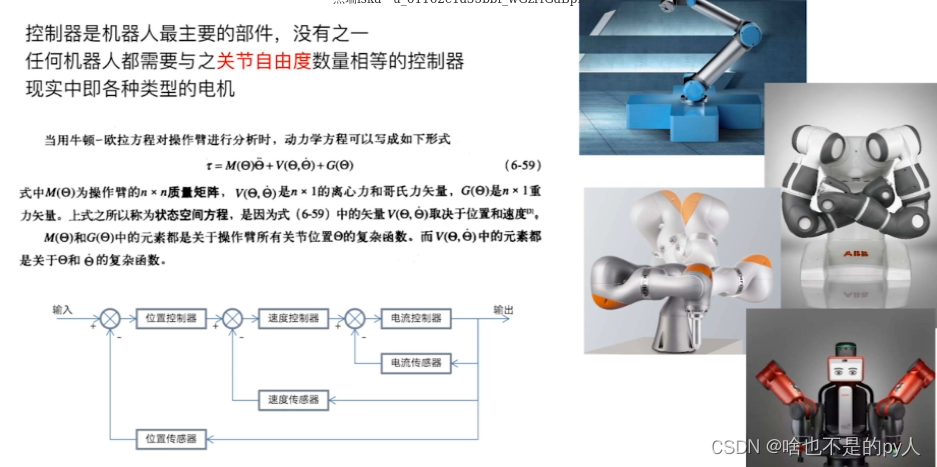
然后进行正向动力学的计算(位置速度来计算加速度)
然后检查加速度是不是合理的状态
然后进行差分迭代
最后是一个积分器,欧拉积分器
在一个while循环中添加每一步的控制量,再写一个step就可以开始循环这个函数很方便
.3 实例
import mujoco_py as mp
model = mp.load_model_from_path('ur5.xml')
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
for i in range(3000):
# sim.data.ctrl[:6] = 1
sim.step()
viewer.render()先是读取了ur5的model
ur5的model里添加了相应的actuator
然后建立Mjsim的仿真并传入viewer中显示
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
然后开启循环
for i in range(3000):
# sim.data.ctrl[:6] = 1
sim.step()
viewer.render()把每个关节的控制输入给到1
sim.data.ctrl[:6] = 1然后step开始输出
输出完之后进行render
完整代码:
import mujoco_py as mp
model = mp.load_model_from_path('ur5.xml')
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
for i in range(3000):
sim.data.ctrl[:6] = 1
sim.step()
viewer.render()运行
References