文章目录
- DCT相关背景知识
- DCT变换系数矩阵
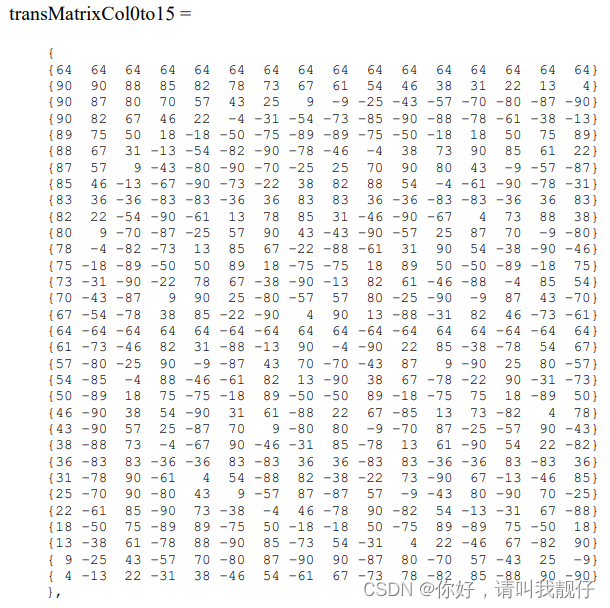
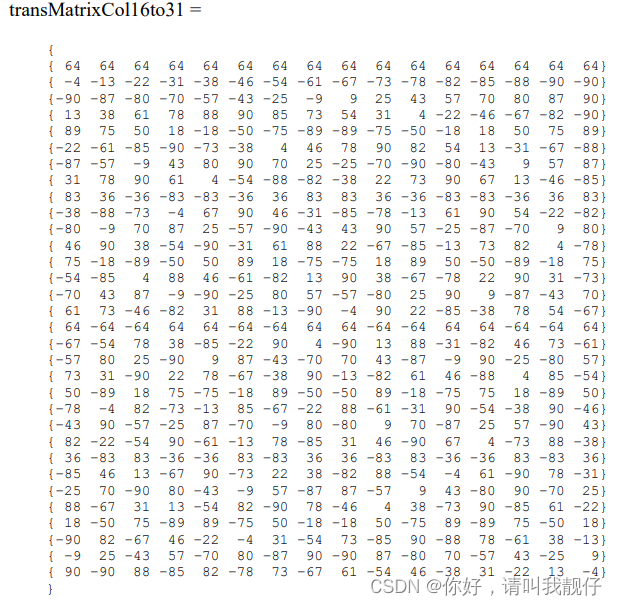
- 32x32变换矩阵系数
- 其他尺寸变换矩阵系数
- 变换计算过程
- 流程图
- 代码实现
- 数据
- 残差变换系数
- 对应残差
- 我的简单实现
- 实现细节
- 实现代码
- x265对应代码实现
- openHEVC代码实现
DCT相关背景知识
DCT变换系数矩阵
标准提供了32x32的系数矩阵,4x4、8x8、16x16的矩阵都可以从中提取出来
32x32变换矩阵系数
其他尺寸变换矩阵系数
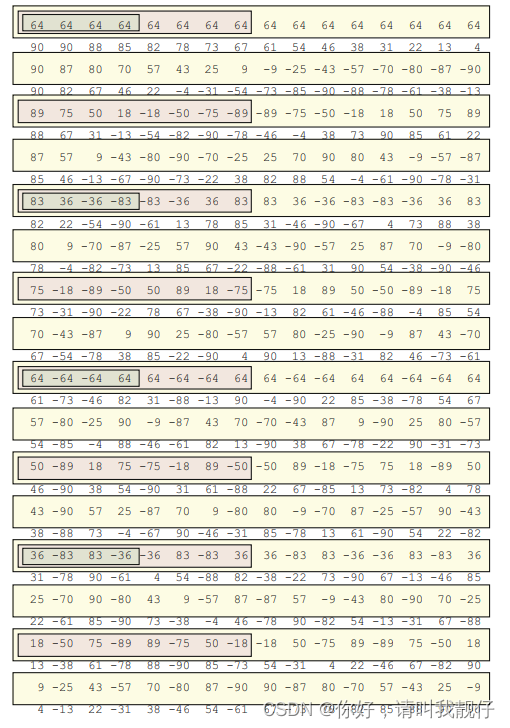
从上面来看,4x4的变换矩阵,系数为:
[
64
64
64
64
83
36
−
36
−
83
64
−
64
−
64
64
36
−
83
83
−
36
]
\begin{bmatrix} 64 & 64 & 64 & 64 \\ 83 & 36 & -36 & -83 \\ 64 & -64 & -64 & 64 \\ 36 & -83 & 83 & -36 \end{bmatrix}
648364366436−64−8364−36−648364−8364−36
其他尺寸的变换系数矩阵也可以从图中对应找到
变换计算过程
流程图
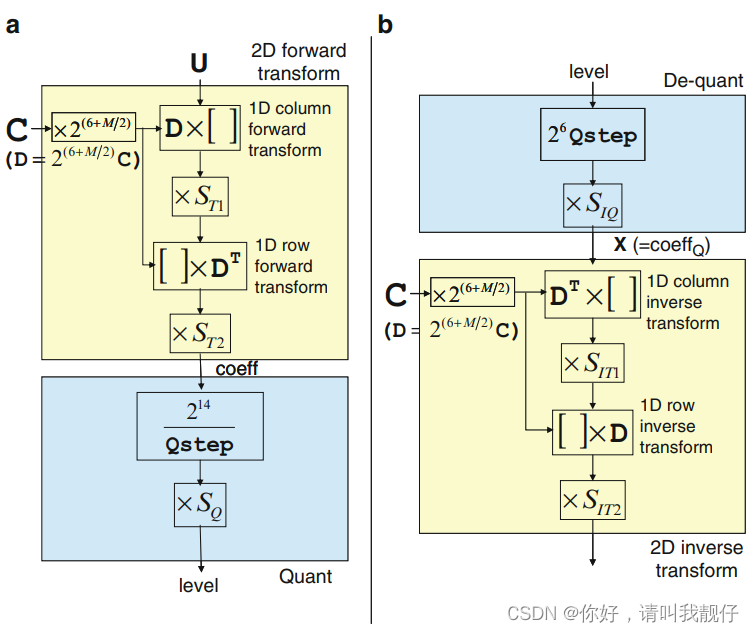
需要注意的是:
- 左乘表示列变换,右乘表示行变换
- 反变换的过程中,进行了两次Scale
伸缩矩阵,具体定义为:
代码实现
数据
残差变换系数
对应残差
我的简单实现
实现细节
- 实现公式
R = D T ⋅ C × S I T 1 ⋅ D × S I T 2 R = D^T \cdot C \times S_{IT1} \cdot D \times S_{IT2} R=DT⋅C×SIT1⋅D×SIT2 - 暂时忽略伸缩
R = D T ⋅ C ⋅ D R = D^T \cdot C \cdot D R=DT⋅C⋅D - 稍加处理
R = ( C T ⋅ D ) T ⋅ D R = { (C^T \cdot D) }^T \cdot D R=(CT⋅D)T⋅D - 重点来了,到这里之后。
就可以把公式可以分成两部分
T m p = C T ⋅ D R = T m p T ⋅ D Tmp =C^T \cdot D \\ R = { Tmp }^T \cdot D Tmp=CT⋅DR=TmpT⋅D - 加入伸缩
T m p = C T ⋅ D × S I T 1 R = T m p T ⋅ D × S I T 2 Tmp =C^T \cdot D \times S_{IT1} \\ R = { Tmp }^T \cdot D \times S_{IT2} Tmp=CT⋅D×SIT1R=TmpT⋅D×SIT2 - 也就是说,我们可以这样定义函数。
y = f u n ( a , b , s ) = a T ⋅ b × s y = fun(a,b,s) = a^T \cdot b \times s y=fun(a,b,s)=aT⋅b×s
函数步骤为:先转置,再列变换,然后伸缩
也就是说,我们只需要实现这个函数,然后调用两次即可
实现代码
// 变换系数
static const signed char transform[32][32] = {
{ 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64,
64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64 },
{ 90, 90, 88, 85, 82, 78, 73, 67, 61, 54, 46, 38, 31, 22, 13, 4,
-4, -13, -22, -31, -38, -46, -54, -61, -67, -73, -78, -82, -85, -88, -90, -90 },
{ 90, 87, 80, 70, 57, 43, 25, 9, -9, -25, -43, -57, -70, -80, -87, -90,
-90, -87, -80, -70, -57, -43, -25, -9, 9, 25, 43, 57, 70, 80, 87, 90 },
{ 90, 82, 67, 46, 22, -4, -31, -54, -73, -85, -90, -88, -78, -61, -38, -13,
13, 38, 61, 78, 88, 90, 85, 73, 54, 31, 4, -22, -46, -67, -82, -90 },
{ 89, 75, 50, 18, -18, -50, -75, -89, -89, -75, -50, -18, 18, 50, 75, 89,
89, 75, 50, 18, -18, -50, -75, -89, -89, -75, -50, -18, 18, 50, 75, 89 },
{ 88, 67, 31, -13, -54, -82, -90, -78, -46, -4, 38, 73, 90, 85, 61, 22,
-22, -61, -85, -90, -73, -38, 4, 46, 78, 90, 82, 54, 13, -31, -67, -88 },
{ 87, 57, 9, -43, -80, -90, -70, -25, 25, 70, 90, 80, 43, -9, -57, -87,
-87, -57, -9, 43, 80, 90, 70, 25, -25, -70, -90, -80, -43, 9, 57, 87 },
{ 85, 46, -13, -67, -90, -73, -22, 38, 82, 88, 54, -4, -61, -90, -78, -31,
31, 78, 90, 61, 4, -54, -88, -82, -38, 22, 73, 90, 67, 13, -46, -85 },
{ 83, 36, -36, -83, -83, -36, 36, 83, 83, 36, -36, -83, -83, -36, 36, 83,
83, 36, -36, -83, -83, -36, 36, 83, 83, 36, -36, -83, -83, -36, 36, 83 },
{ 82, 22, -54, -90, -61, 13, 78, 85, 31, -46, -90, -67, 4, 73, 88, 38,
-38, -88, -73, -4, 67, 90, 46, -31, -85, -78, -13, 61, 90, 54, -22, -82 },
{ 80, 9, -70, -87, -25, 57, 90, 43, -43, -90, -57, 25, 87, 70, -9, -80,
-80, -9, 70, 87, 25, -57, -90, -43, 43, 90, 57, -25, -87, -70, 9, 80 },
{ 78, -4, -82, -73, 13, 85, 67, -22, -88, -61, 31, 90, 54, -38, -90, -46,
46, 90, 38, -54, -90, -31, 61, 88, 22, -67, -85, -13, 73, 82, 4, -78 },
{ 75, -18, -89, -50, 50, 89, 18, -75, -75, 18, 89, 50, -50, -89, -18, 75,
75, -18, -89, -50, 50, 89, 18, -75, -75, 18, 89, 50, -50, -89, -18, 75 },
{ 73, -31, -90, -22, 78, 67, -38, -90, -13, 82, 61, -46, -88, -4, 85, 54,
-54, -85, 4, 88, 46, -61, -82, 13, 90, 38, -67, -78, 22, 90, 31, -73 },
{ 70, -43, -87, 9, 90, 25, -80, -57, 57, 80, -25, -90, -9, 87, 43, -70,
-70, 43, 87, -9, -90, -25, 80, 57, -57, -80, 25, 90, 9, -87, -43, 70 },
{ 67, -54, -78, 38, 85, -22, -90, 4, 90, 13, -88, -31, 82, 46, -73, -61,
61, 73, -46, -82, 31, 88, -13, -90, -4, 90, 22, -85, -38, 78, 54, -67 },
{ 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64,
64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64 },
{ 61, -73, -46, 82, 31, -88, -13, 90, -4, -90, 22, 85, -38, -78, 54, 67,
-67, -54, 78, 38, -85, -22, 90, 4, -90, 13, 88, -31, -82, 46, 73, -61 },
{ 57, -80, -25, 90, -9, -87, 43, 70, -70, -43, 87, 9, -90, 25, 80, -57,
-57, 80, 25, -90, 9, 87, -43, -70, 70, 43, -87, -9, 90, -25, -80, 57 },
{ 54, -85, -4, 88, -46, -61, 82, 13, -90, 38, 67, -78, -22, 90, -31, -73,
73, 31, -90, 22, 78, -67, -38, 90, -13, -82, 61, 46, -88, 4, 85, -54 },
{ 50, -89, 18, 75, -75, -18, 89, -50, -50, 89, -18, -75, 75, 18, -89, 50,
50, -89, 18, 75, -75, -18, 89, -50, -50, 89, -18, -75, 75, 18, -89, 50 },
{ 46, -90, 38, 54, -90, 31, 61, -88, 22, 67, -85, 13, 73, -82, 4, 78,
-78, -4, 82, -73, -13, 85, -67, -22, 88, -61, -31, 90, -54, -38, 90, -46 },
{ 43, -90, 57, 25, -87, 70, 9, -80, 80, -9, -70, 87, -25, -57, 90, -43,
-43, 90, -57, -25, 87, -70, -9, 80, -80, 9, 70, -87, 25, 57, -90, 43 },
{ 38, -88, 73, -4, -67, 90, -46, -31, 85, -78, 13, 61, -90, 54, 22, -82,
82, -22, -54, 90, -61, -13, 78, -85, 31, 46, -90, 67, 4, -73, 88, -38 },
{ 36, -83, 83, -36, -36, 83, -83, 36, 36, -83, 83, -36, -36, 83, -83, 36,
36, -83, 83, -36, -36, 83, -83, 36, 36, -83, 83, -36, -36, 83, -83, 36 },
{ 31, -78, 90, -61, 4, 54, -88, 82, -38, -22, 73, -90, 67, -13, -46, 85,
-85, 46, 13, -67, 90, -73, 22, 38, -82, 88, -54, -4, 61, -90, 78, -31 },
{ 25, -70, 90, -80, 43, 9, -57, 87, -87, 57, -9, -43, 80, -90, 70, -25,
-25, 70, -90, 80, -43, -9, 57, -87, 87, -57, 9, 43, -80, 90, -70, 25 },
{ 22, -61, 85, -90, 73, -38, -4, 46, -78, 90, -82, 54, -13, -31, 67, -88,
88, -67, 31, 13, -54, 82, -90, 78, -46, 4, 38, -73, 90, -85, 61, -22 },
{ 18, -50, 75, -89, 89, -75, 50, -18, -18, 50, -75, 89, -89, 75, -50, 18,
18, -50, 75, -89, 89, -75, 50, -18, -18, 50, -75, 89, -89, 75, -50, 18 },
{ 13, -38, 61, -78, 88, -90, 85, -73, 54, -31, 4, 22, -46, 67, -82, 90,
-90, 82, -67, 46, -22, -4, 31, -54, 73, -85, 90, -88, 78, -61, 38, -13 },
{ 9, -25, 43, -57, 70, -80, 87, -90, 90, -87, 80, -70, 57, -43, 25, -9,
-9, 25, -43, 57, -70, 80, -87, 90, -90, 87, -80, 70, -57, 43, -25, 9 },
{ 4, -13, 22, -31, 38, -46, 54, -61, 67, -73, 78, -82, 85, -88, 90, -90,
90, -90, 88, -85, 82, -78, 73, -67, 61, -54, 46, -38, 31, -22, 13, -4 },
};
// 残差变换系数
short coeffs1[16 * 16] = {
-8730, -180, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
90, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
90, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
90, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
90, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
90, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
90, 0, -90, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0
};
//
static void func(short* src, short* dst, int s) {
short add = (1 << (s - 1));
for (int r1 = 0; r1 < 16; ++r1) {
for (int c2 = 0; c2 < 16; ++c2) {
int tmp = 0;
for (int t = 0; t < 16; ++t)
tmp += src[r1 + t * 16] * transform[2 * t][c2];
dst[r1 * 16 + c2] = ((tmp + add) >> s);
}
}
}
static void MyIDCT(short* src, short* dst) {
func(src, dst, 7);
func(dst, src, 12);
}
x265对应代码实现
const short g_t16[16][16] =
{
{ 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64 },
{ 90, 87, 80, 70, 57, 43, 25, 9, -9, -25, -43, -57, -70, -80, -87, -90 },
{ 89, 75, 50, 18, -18, -50, -75, -89, -89, -75, -50, -18, 18, 50, 75, 89 },
{ 87, 57, 9, -43, -80, -90, -70, -25, 25, 70, 90, 80, 43, -9, -57, -87 },
{ 83, 36, -36, -83, -83, -36, 36, 83, 83, 36, -36, -83, -83, -36, 36, 83 },
{ 80, 9, -70, -87, -25, 57, 90, 43, -43, -90, -57, 25, 87, 70, -9, -80 },
{ 75, -18, -89, -50, 50, 89, 18, -75, -75, 18, 89, 50, -50, -89, -18, 75 },
{ 70, -43, -87, 9, 90, 25, -80, -57, 57, 80, -25, -90, -9, 87, 43, -70 },
{ 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64 },
{ 57, -80, -25, 90, -9, -87, 43, 70, -70, -43, 87, 9, -90, 25, 80, -57 },
{ 50, -89, 18, 75, -75, -18, 89, -50, -50, 89, -18, -75, 75, 18, -89, 50 },
{ 43, -90, 57, 25, -87, 70, 9, -80, 80, -9, -70, 87, -25, -57, 90, -43 },
{ 36, -83, 83, -36, -36, 83, -83, 36, 36, -83, 83, -36, -36, 83, -83, 36 },
{ 25, -70, 90, -80, 43, 9, -57, 87, -87, 57, -9, -43, 80, -90, 70, -25 },
{ 18, -50, 75, -89, 89, -75, 50, -18, -18, 50, -75, 89, -89, 75, -50, 18 },
{ 9, -25, 43, -57, 70, -80, 87, -90, 90, -87, 80, -70, 57, -43, 25, -9 }
};
static void partialButterflyInverse16(const short* src, short* dst, int shift, int line)
{
int j, k;
int E[8], O[8];
int EE[4], EO[4];
int EEE[2], EEO[2];
int add = 1 << (shift - 1);
for (j = 0; j < line; j++)
{
/* Utilizing symmetry properties to the maximum to minimize the number of multiplications */
for (k = 0; k < 8; k++)
{
O[k] = g_t16[1][k] * src[line] + g_t16[3][k] * src[3 * line] + g_t16[5][k] * src[5 * line] + g_t16[7][k] * src[7 * line] +
g_t16[9][k] * src[9 * line] + g_t16[11][k] * src[11 * line] + g_t16[13][k] * src[13 * line] + g_t16[15][k] * src[15 * line];
}
for (k = 0; k < 4; k++)
{
EO[k] = g_t16[2][k] * src[2 * line] + g_t16[6][k] * src[6 * line] + g_t16[10][k] * src[10 * line] + g_t16[14][k] * src[14 * line];
}
EEO[0] = g_t16[4][0] * src[4 * line] + g_t16[12][0] * src[12 * line];
EEE[0] = g_t16[0][0] * src[0] + g_t16[8][0] * src[8 * line];
EEO[1] = g_t16[4][1] * src[4 * line] + g_t16[12][1] * src[12 * line];
EEE[1] = g_t16[0][1] * src[0] + g_t16[8][1] * src[8 * line];
/* Combining even and odd terms at each hierarchy levels to calculate the final spatial domain vector */
for (k = 0; k < 2; k++)
{
EE[k] = EEE[k] + EEO[k];
EE[k + 2] = EEE[1 - k] - EEO[1 - k];
}
for (k = 0; k < 4; k++)
{
E[k] = EE[k] + EO[k];
E[k + 4] = EE[3 - k] - EO[3 - k];
}
for (k = 0; k < 8; k++)
{
dst[k] = (short)x265_clip3(-32768, 32767, (E[k] + O[k] + add) >> shift);
dst[k + 8] = (short)x265_clip3(-32768, 32767, (E[7 - k] - O[7 - k] + add) >> shift);
}
src++;
dst += 16;
}
}
static void idct16_c(const short* src, short* dst, __int64 dstStride)
{
const int shift_1st = 7;
const int shift_2nd = 12 - (X265_DEPTH - 8);
ALIGN_VAR_32(short, coef[16 * 16]);
ALIGN_VAR_32(short, block[16 * 16]);
partialButterflyInverse16(src, coef, shift_1st, 16);
partialButterflyInverse16(coef, block, shift_2nd, 16);
for (int i = 0; i < 16; i++)
{
memcpy(&dst[i * dstStride], &block[i * 16], 16 * sizeof(short));
}
}
openHEVC代码实现
static const signed char transform[32][32] = {
{ 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64,
64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64 },
{ 90, 90, 88, 85, 82, 78, 73, 67, 61, 54, 46, 38, 31, 22, 13, 4,
-4, -13, -22, -31, -38, -46, -54, -61, -67, -73, -78, -82, -85, -88, -90, -90 },
{ 90, 87, 80, 70, 57, 43, 25, 9, -9, -25, -43, -57, -70, -80, -87, -90,
-90, -87, -80, -70, -57, -43, -25, -9, 9, 25, 43, 57, 70, 80, 87, 90 },
{ 90, 82, 67, 46, 22, -4, -31, -54, -73, -85, -90, -88, -78, -61, -38, -13,
13, 38, 61, 78, 88, 90, 85, 73, 54, 31, 4, -22, -46, -67, -82, -90 },
{ 89, 75, 50, 18, -18, -50, -75, -89, -89, -75, -50, -18, 18, 50, 75, 89,
89, 75, 50, 18, -18, -50, -75, -89, -89, -75, -50, -18, 18, 50, 75, 89 },
{ 88, 67, 31, -13, -54, -82, -90, -78, -46, -4, 38, 73, 90, 85, 61, 22,
-22, -61, -85, -90, -73, -38, 4, 46, 78, 90, 82, 54, 13, -31, -67, -88 },
{ 87, 57, 9, -43, -80, -90, -70, -25, 25, 70, 90, 80, 43, -9, -57, -87,
-87, -57, -9, 43, 80, 90, 70, 25, -25, -70, -90, -80, -43, 9, 57, 87 },
{ 85, 46, -13, -67, -90, -73, -22, 38, 82, 88, 54, -4, -61, -90, -78, -31,
31, 78, 90, 61, 4, -54, -88, -82, -38, 22, 73, 90, 67, 13, -46, -85 },
{ 83, 36, -36, -83, -83, -36, 36, 83, 83, 36, -36, -83, -83, -36, 36, 83,
83, 36, -36, -83, -83, -36, 36, 83, 83, 36, -36, -83, -83, -36, 36, 83 },
{ 82, 22, -54, -90, -61, 13, 78, 85, 31, -46, -90, -67, 4, 73, 88, 38,
-38, -88, -73, -4, 67, 90, 46, -31, -85, -78, -13, 61, 90, 54, -22, -82 },
{ 80, 9, -70, -87, -25, 57, 90, 43, -43, -90, -57, 25, 87, 70, -9, -80,
-80, -9, 70, 87, 25, -57, -90, -43, 43, 90, 57, -25, -87, -70, 9, 80 },
{ 78, -4, -82, -73, 13, 85, 67, -22, -88, -61, 31, 90, 54, -38, -90, -46,
46, 90, 38, -54, -90, -31, 61, 88, 22, -67, -85, -13, 73, 82, 4, -78 },
{ 75, -18, -89, -50, 50, 89, 18, -75, -75, 18, 89, 50, -50, -89, -18, 75,
75, -18, -89, -50, 50, 89, 18, -75, -75, 18, 89, 50, -50, -89, -18, 75 },
{ 73, -31, -90, -22, 78, 67, -38, -90, -13, 82, 61, -46, -88, -4, 85, 54,
-54, -85, 4, 88, 46, -61, -82, 13, 90, 38, -67, -78, 22, 90, 31, -73 },
{ 70, -43, -87, 9, 90, 25, -80, -57, 57, 80, -25, -90, -9, 87, 43, -70,
-70, 43, 87, -9, -90, -25, 80, 57, -57, -80, 25, 90, 9, -87, -43, 70 },
{ 67, -54, -78, 38, 85, -22, -90, 4, 90, 13, -88, -31, 82, 46, -73, -61,
61, 73, -46, -82, 31, 88, -13, -90, -4, 90, 22, -85, -38, 78, 54, -67 },
{ 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64,
64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64, 64, -64, -64, 64 },
{ 61, -73, -46, 82, 31, -88, -13, 90, -4, -90, 22, 85, -38, -78, 54, 67,
-67, -54, 78, 38, -85, -22, 90, 4, -90, 13, 88, -31, -82, 46, 73, -61 },
{ 57, -80, -25, 90, -9, -87, 43, 70, -70, -43, 87, 9, -90, 25, 80, -57,
-57, 80, 25, -90, 9, 87, -43, -70, 70, 43, -87, -9, 90, -25, -80, 57 },
{ 54, -85, -4, 88, -46, -61, 82, 13, -90, 38, 67, -78, -22, 90, -31, -73,
73, 31, -90, 22, 78, -67, -38, 90, -13, -82, 61, 46, -88, 4, 85, -54 },
{ 50, -89, 18, 75, -75, -18, 89, -50, -50, 89, -18, -75, 75, 18, -89, 50,
50, -89, 18, 75, -75, -18, 89, -50, -50, 89, -18, -75, 75, 18, -89, 50 },
{ 46, -90, 38, 54, -90, 31, 61, -88, 22, 67, -85, 13, 73, -82, 4, 78,
-78, -4, 82, -73, -13, 85, -67, -22, 88, -61, -31, 90, -54, -38, 90, -46 },
{ 43, -90, 57, 25, -87, 70, 9, -80, 80, -9, -70, 87, -25, -57, 90, -43,
-43, 90, -57, -25, 87, -70, -9, 80, -80, 9, 70, -87, 25, 57, -90, 43 },
{ 38, -88, 73, -4, -67, 90, -46, -31, 85, -78, 13, 61, -90, 54, 22, -82,
82, -22, -54, 90, -61, -13, 78, -85, 31, 46, -90, 67, 4, -73, 88, -38 },
{ 36, -83, 83, -36, -36, 83, -83, 36, 36, -83, 83, -36, -36, 83, -83, 36,
36, -83, 83, -36, -36, 83, -83, 36, 36, -83, 83, -36, -36, 83, -83, 36 },
{ 31, -78, 90, -61, 4, 54, -88, 82, -38, -22, 73, -90, 67, -13, -46, 85,
-85, 46, 13, -67, 90, -73, 22, 38, -82, 88, -54, -4, 61, -90, 78, -31 },
{ 25, -70, 90, -80, 43, 9, -57, 87, -87, 57, -9, -43, 80, -90, 70, -25,
-25, 70, -90, 80, -43, -9, 57, -87, 87, -57, 9, 43, -80, 90, -70, 25 },
{ 22, -61, 85, -90, 73, -38, -4, 46, -78, 90, -82, 54, -13, -31, 67, -88,
88, -67, 31, 13, -54, 82, -90, 78, -46, 4, 38, -73, 90, -85, 61, -22 },
{ 18, -50, 75, -89, 89, -75, 50, -18, -18, 50, -75, 89, -89, 75, -50, 18,
18, -50, 75, -89, 89, -75, 50, -18, -18, 50, -75, 89, -89, 75, -50, 18 },
{ 13, -38, 61, -78, 88, -90, 85, -73, 54, -31, 4, 22, -46, 67, -82, 90,
-90, 82, -67, 46, -22, -4, 31, -54, 73, -85, 90, -88, 78, -61, 38, -13 },
{ 9, -25, 43, -57, 70, -80, 87, -90, 90, -87, 80, -70, 57, -43, 25, -9,
-9, 25, -43, 57, -70, 80, -87, 90, -90, 87, -80, 70, -57, 43, -25, 9 },
{ 4, -13, 22, -31, 38, -46, 54, -61, 67, -73, 78, -82, 85, -88, 90, -90,
90, -90, 88, -85, 82, -78, 73, -67, 61, -54, 46, -38, 31, -22, 13, -4 },
};
static __forceinline short av_clip_int16(int a)
{
if ((a + 0x8000U) & ~0xFFFF) return (a >> 31) ^ 0x7FFF;
else return a;
}
#define FFMIN(a,b) ((a) > (b) ? (b) : (a))
#define SET(dst, x) (dst) = (x)
#define SCALE(dst, x) (dst) = av_clip_int16(((x) + add) >> shift)
#define TR_4(dst, src, dstep, sstep, assign, end) \
do { \
const int e0 = 64 * src[0 * sstep] + 64 * src[2 * sstep]; \
const int e1 = 64 * src[0 * sstep] - 64 * src[2 * sstep]; \
const int o0 = 83 * src[1 * sstep] + 36 * src[3 * sstep]; \
const int o1 = 36 * src[1 * sstep] - 83 * src[3 * sstep]; \
\
assign(dst[0 * dstep], e0 + o0); \
assign(dst[1 * dstep], e1 + o1); \
assign(dst[2 * dstep], e1 - o1); \
assign(dst[3 * dstep], e0 - o0); \
} while (0)
#define TR_8(dst, src, dstep, sstep, assign, end) \
do { \
int i, j; \
int e_8[4]; \
int o_8[4] = { 0 }; \
for (i = 0; i < 4; i++) \
for (j = 1; j < end; j += 2) \
o_8[i] += transform[4 * j][i] * src[j * sstep]; \
TR_4(e_8, src, 1, 2 * sstep, SET, 4); \
\
for (i = 0; i < 4; i++) { \
assign(dst[i * dstep], e_8[i] + o_8[i]); \
assign(dst[(7 - i) * dstep], e_8[i] - o_8[i]); \
} \
} while (0)
#define TR_16(dst, src, dstep, sstep, assign, end) \
do { \
int i, j; \
int e_16[8]; \
int o_16[8] = { 0 }; \
for (i = 0; i < 8; i++) \
for (j = 1; j < end; j += 2) \
o_16[i] += transform[2 * j][i] * src[j * sstep]; \
TR_8(e_16, src, 1, 2 * sstep, SET, 8); \
\
for (i = 0; i < 8; i++) { \
assign(dst[i * dstep], e_16[i] + o_16[i]); \
assign(dst[(15 - i) * dstep], e_16[i] - o_16[i]); \
} \
} while (0)
static void idct_16x16_8(short* coeffs, int col_limit) {
int i;
int shift = 7;
int add = 1 << (shift - 1);
short* src = coeffs;
int limit = FFMIN(col_limit, 16);
int limit2 = FFMIN(col_limit + 4, 16);
for (i = 0; i < 16; i++) {
TR_16(src, src, 16, 16, SCALE, limit2);
if (limit2 < 16 && i%4 == 0 && !!i)
limit2 -= 4;
src++;
}
shift = 20 - BIT_DEPTH;
add = 1 << (shift - 1);
for (i = 0; i < 16; i++) {
TR_16(coeffs, coeffs, 1, 1, SCALE, limit);
coeffs += 16;
}
};