摄像机标定
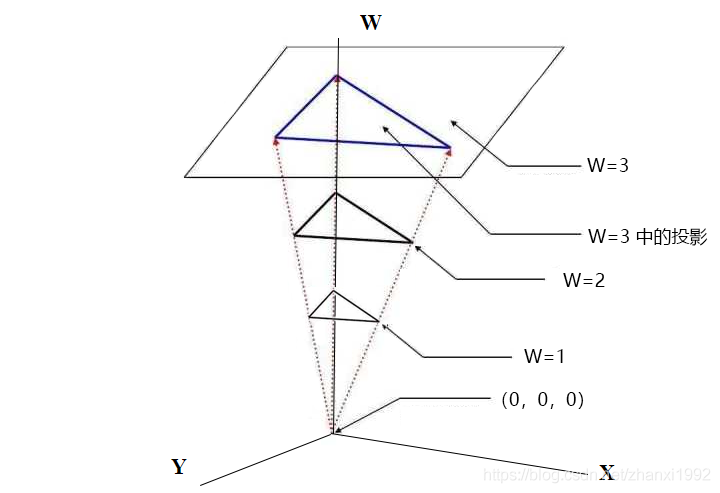
齐次坐标
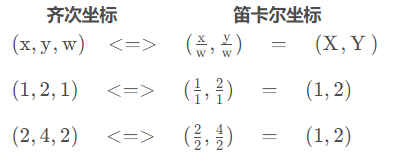
齐次坐标,将欧氏空间的无穷远点,与投影空间中有实际意义的消失点,建立起映射关系。
把齐次坐标转化为笛卡尔坐标的方法:是前面n-1个坐标分量分别除以最后一个分量即可
一些解释和性质:
比较好的理解:
表达一个点比一个向量需要额外的信息。如果我写出一个代数分量表达(1, 4, 7),谁知道它是个向量还是个点!
如果用齐次坐标————上面的(1, 4, 7)如果写成(1,4,7,0),它就是个向量;如果是(1,4,7,1),它就是个点。因此可以用齐次坐标很好的将向量和点统一起来表示。
详见:https://blog.csdn.net/wonengguwozai/article/details/126123349
线性变换
线性变换包括:欧式变换Euclidean、仿射变换affine和透视变换projective。
欧式变换Euclidean
欧式变换保持了长度和角度,平移和旋转是欧式变换。也叫刚体变换。
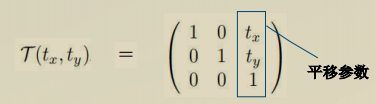
平移
将一个点从一个位置转换到另一个位置
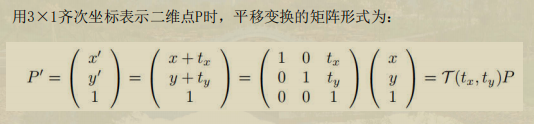
其中:
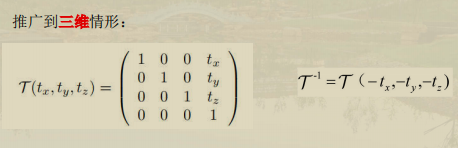
推广到三维:
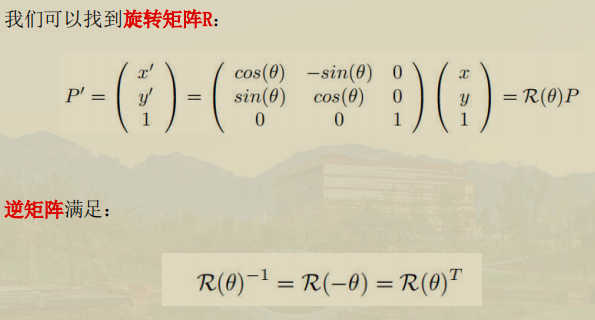
旋转
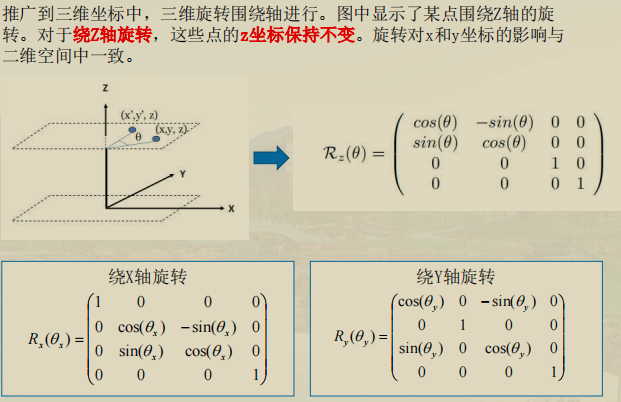
推广到三维:
仿射变换affine
仿射变换保持了长度和角度的比值,仿射变换的例子是剪切和缩放。
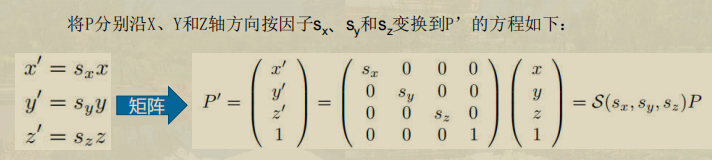
缩放
剪切

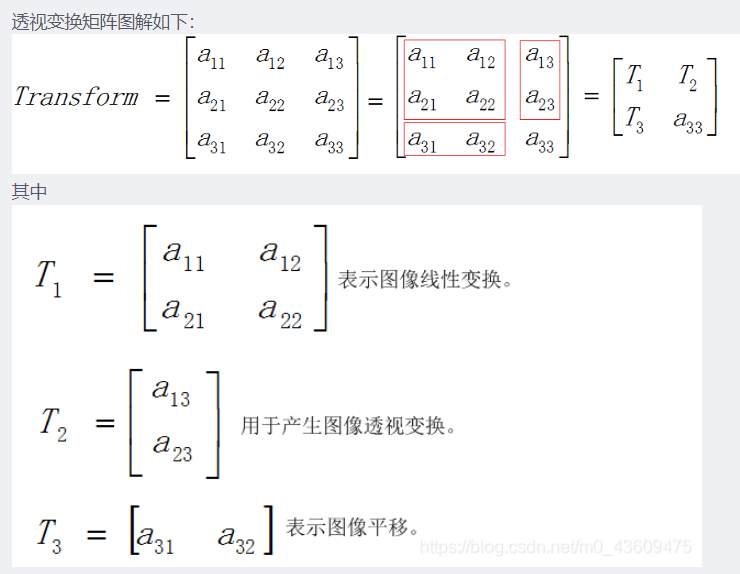
透视变换projective
透视变换可以来实现有限范围的点变换为无穷远点,将图像投影到一个新的视平面(也叫投影变换)
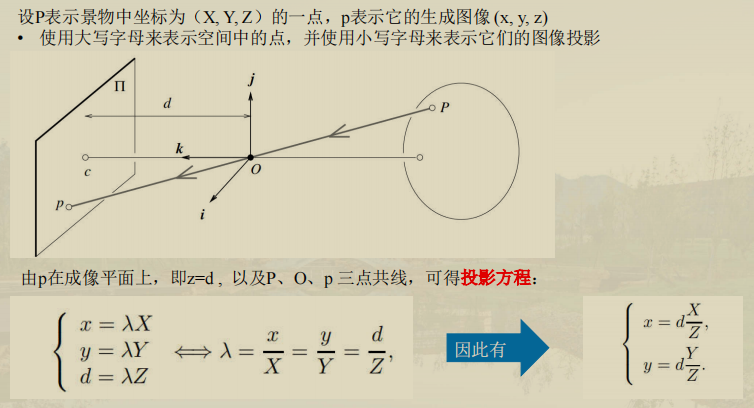
图像成像
针孔透视
针孔模型中,光线通过一个无限小的孔,并且在成像平面上呈现出倒像。
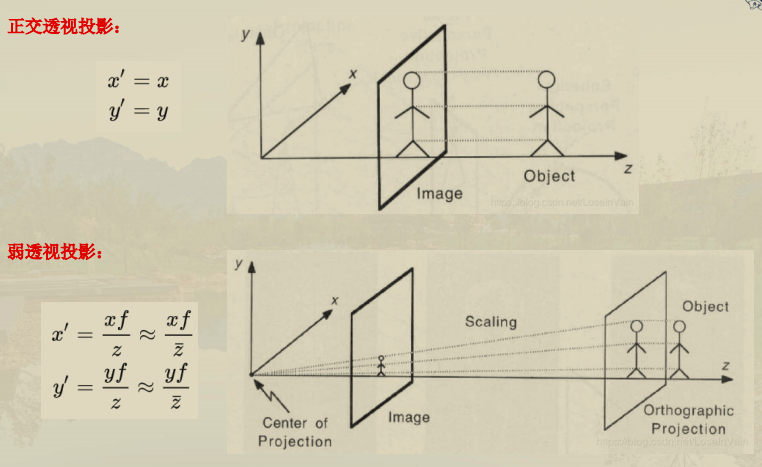
**透视投影:**将三维物体的信息映射到二维平面上。
弱透视
弱透视投影:平面中的所有线段都以相同的放大倍数进行投影。
相机事实上成像在后面,然后取倒像
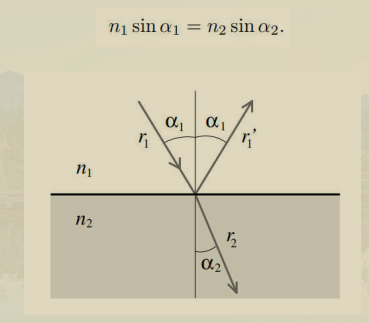
摄像机镜头
Snell定律
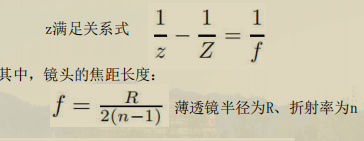
薄透镜
厚透镜

z是镜到cmos的距离,Z是物体到镜的距离
相机的视野
相机的视野:即实际投影到相机视网膜上的景物部分,不仅由焦距定义,还取决于视网膜的有效面积(例如,相机中可曝光的胶片面积,或数码相机中的传感器面积)。
球形像差
简单地说:就是大光圈进光亮大造成虚化。
标准答案:
球形像差,顾名思义是由于透镜的球形表面造成的像差。实际上,球面镜不能将所有光线聚焦在同一点,透过镜片边缘进入的光线会偏离焦点形成像差。尤其在大光圈的时候,有较多光线可以通过镜片。最明显就是一些光点会虚化成一团光,这是由于边缘位置进入的光线与中心聚焦的偏差较大所致。
色差
不同波长(颜色)的光线由于折射系数的差异(色散),在通过透镜时将发生不同程度的折射然后与光轴相交于不同的位置,并在同一图像平面上形成不同的模糊圈(横向色差)。
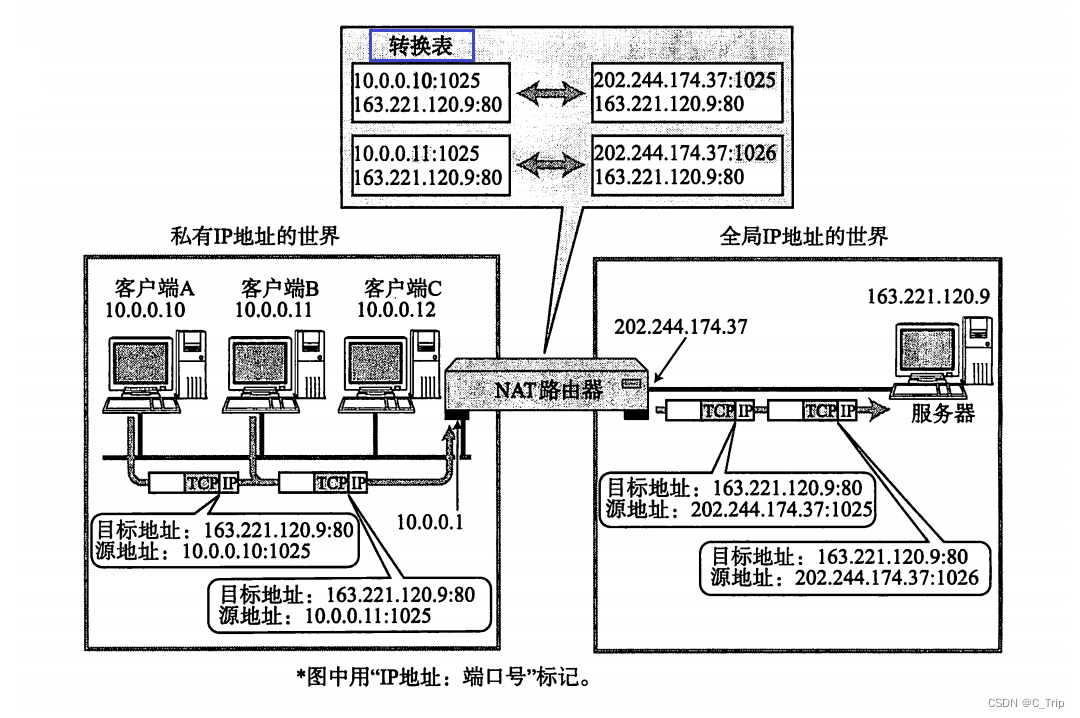
摄像机的几何标定
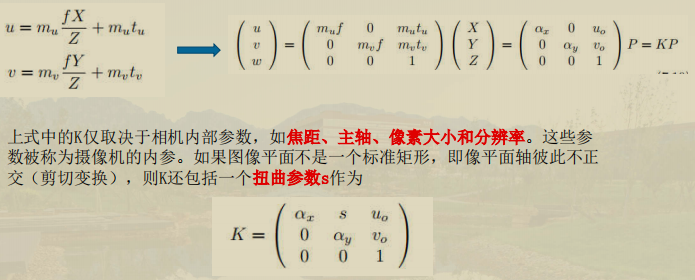
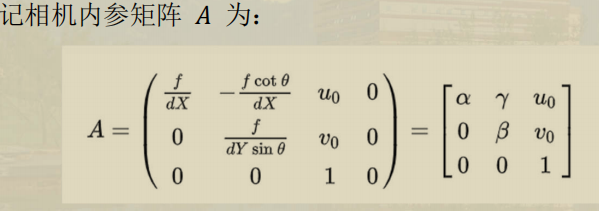
内参矩阵
在u和v方向上分辨率分别为mu和mv,tu和tv是平移量。
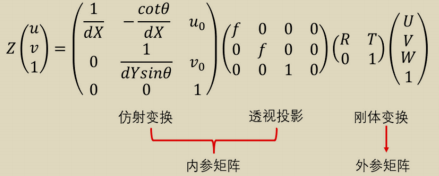
外参矩阵
相机的投影中心不在(0,0,0),主轴不在Z轴上,图像平面虽然仍然与主轴正交,但也不平行于XY平面。
设这个平移矩阵为T(Tx, Ty, Tz)。让主轴与Z轴重合的旋转矩阵由3×3旋转矩阵R给出,子矩阵(RT是平移矩阵)相乘得到3×4变换矩阵。

E被称为外参矩阵。
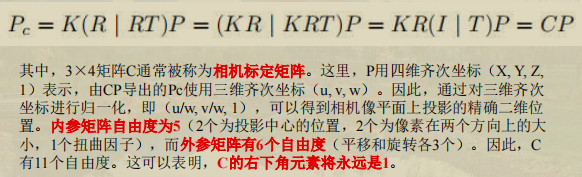
相机标定矩阵
张正友标定法
1.求解内参矩阵和外参矩阵的积H

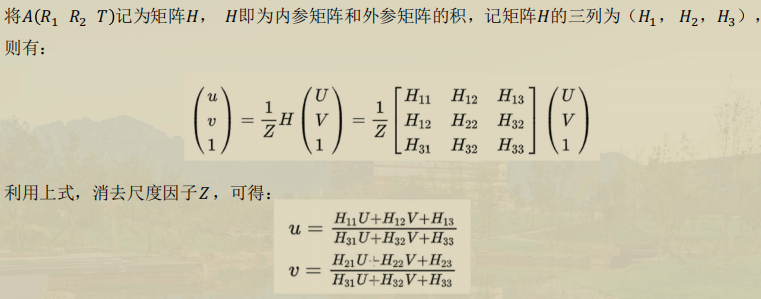
当一张图片上的标定板角点数量等于4时,即可求得该图片对应的矩阵H 。当一张图片上的标定板角点数量大于4时,利用最小二乘法回归最佳的矩阵H 。
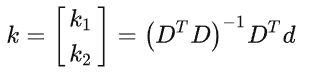
最小二乘法:简单地说就是通过n组X(u,v)和Y(U,V),求解八个参数。
https://blog.csdn.net/W1995S/article/details/118153146
2.求解内参矩阵

3.求解外参矩阵

4、标定相机的畸变参数

r为图像像素点到图像中心点的距离,即 
在这里,x->u y->v