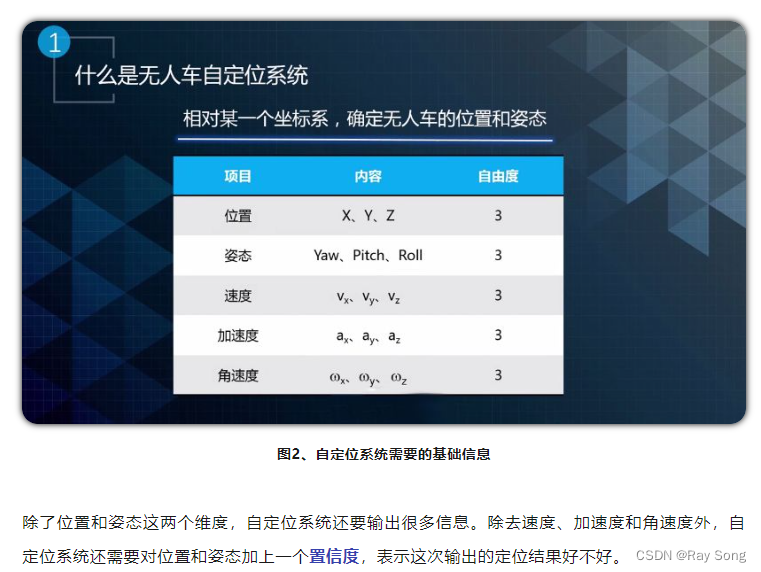
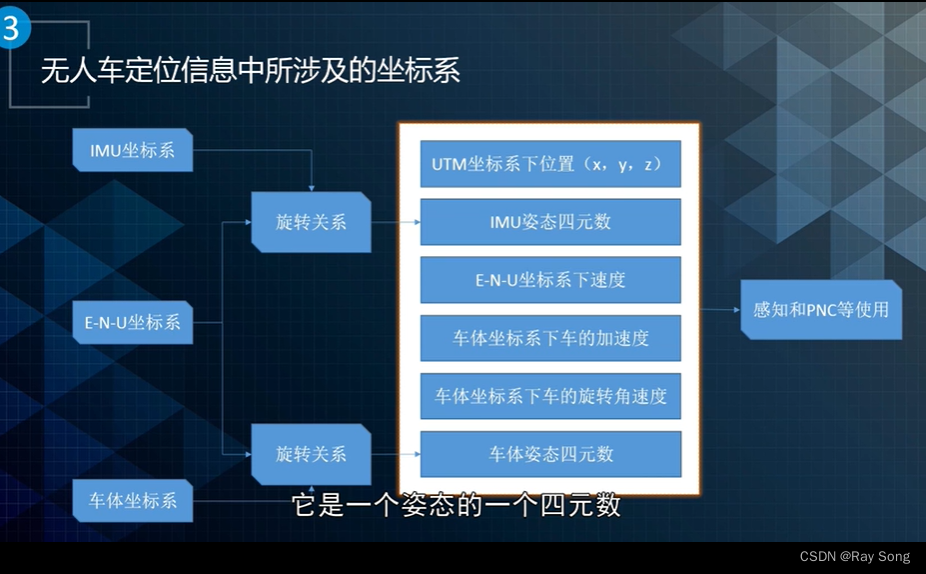
1. 什么是无人车自定位系统
相对一个坐标系来确定无人车的位置和姿态
定位的指标要求大概分为三个部分:精度、鲁棒性、场景
- 定位精度必须控制在10厘米以内,才能使行驶中的自动驾驶车辆避免出现碰撞/车道偏离的情况。
- 鲁棒性一般情况下用最大值来衡量。也就是最大的误差不要超过30厘米。但是在有些时候,纵向误差稍微大一点点,只要没有偏离车道就没有太大影响。
- 场景。例如:
1 白天、黑夜,不同的照明条件,定位的效果是否有区别?
2 春夏秋冬有落叶、雨雪天气等很多种极端情况,定位清晰度是否受到干扰?
3 城市场景下,遇到楼宇、林荫道、隧道、地下车库等对GPS信号有不同程度的遮挡,是否还能精准定位?
2. 为什么无人车需要精确的定位系统
无人车需要精准的定位系统。否则,它无法获悉自己在什么地方,前方是什么情况,哪里是行驶区等。
定位模块还输出加速度和角速度,加速度和角速度是相对于车体本身的,告知车辆当时瞬时的加速度和角速度,对人的乘坐体验非常重要。控制模块根据这些信息做一些控制上的优化,让人的体感更好。
2.1 无人车定位种类
存在3个类别。

2.2 定位类别
激光定位
视觉定位
惯性导航
多传感器融合
3. 百度无人车定位进化历程
多种传感器方案的自动驾驶汽车
4. 百度自动驾驶使用的定位技术

自动驾驶中,在不同的传感器配置下,都需要做到定位的准确性。下面介绍在百度无人车系统中使用的定位技术,主要分为四个部分,GNSS定位技术,载波定位技术,激光点云定位技术和视觉定位技术。
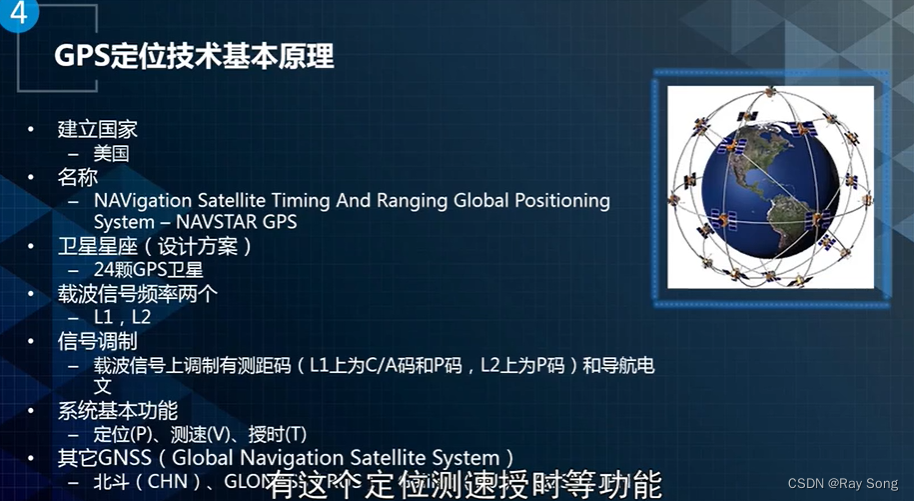
4.1 GNSS定位
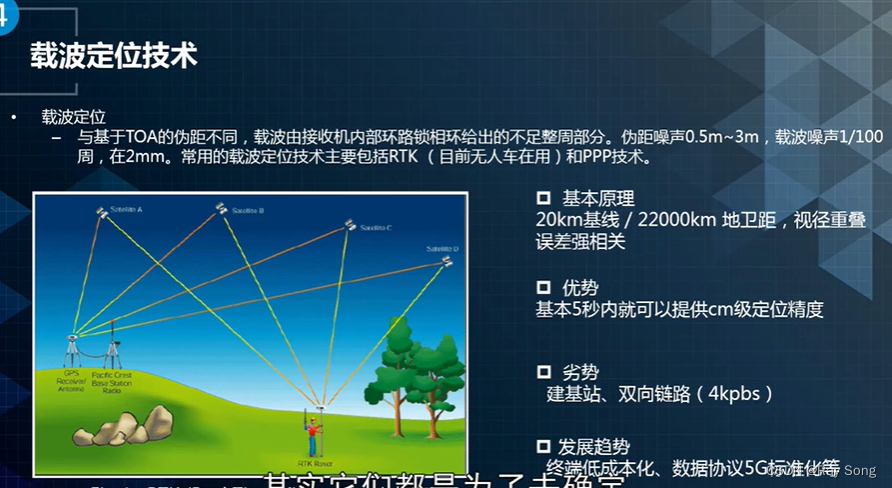
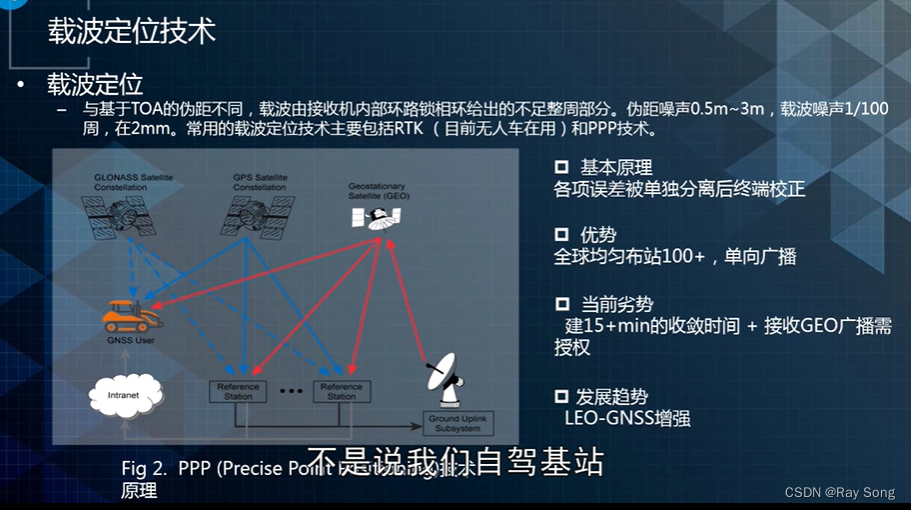
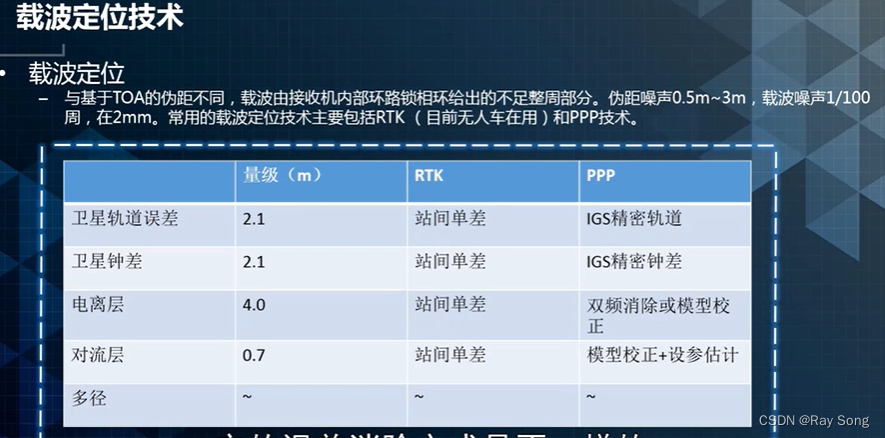
4.2 载波定位技术

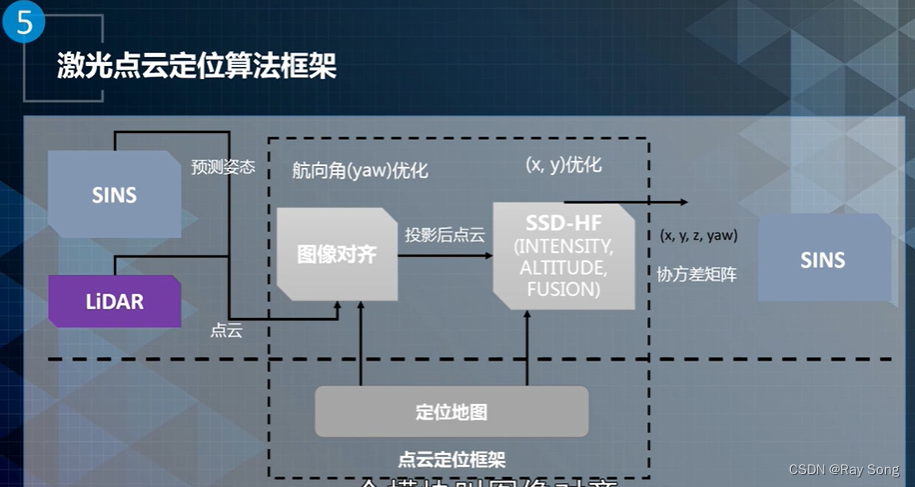
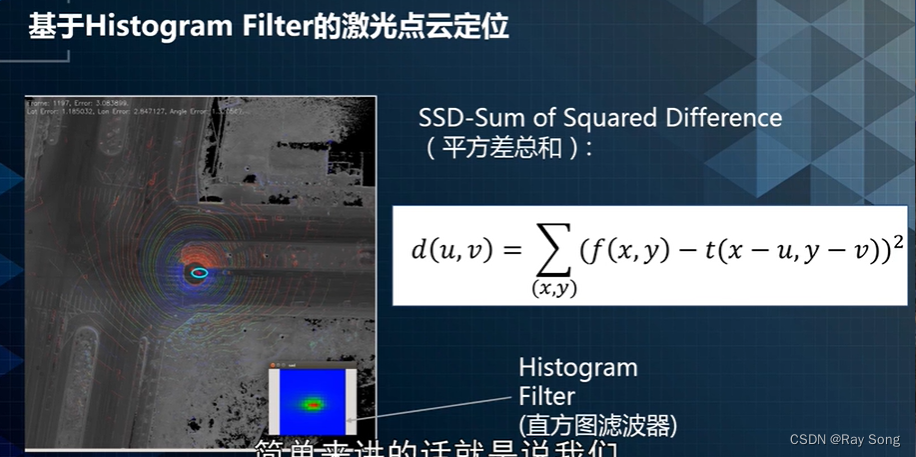
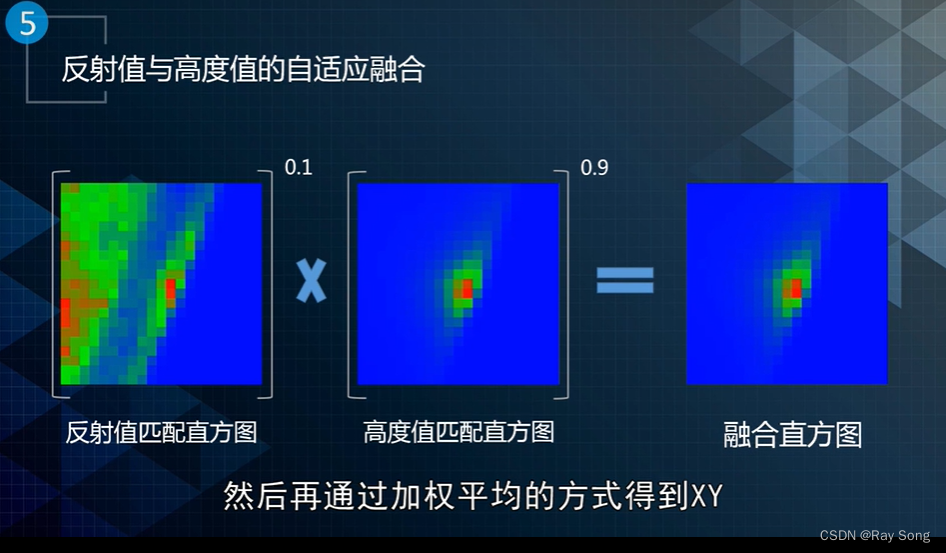
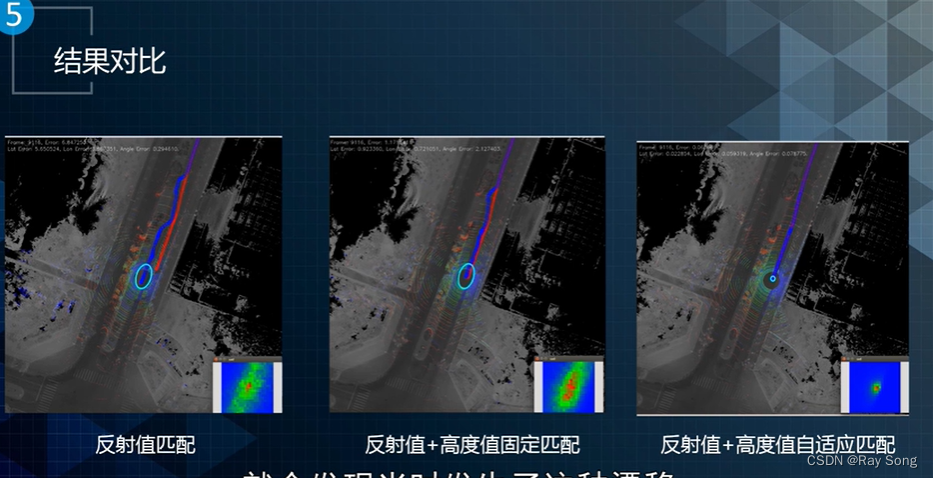
4.3 激光点云定位算法框架

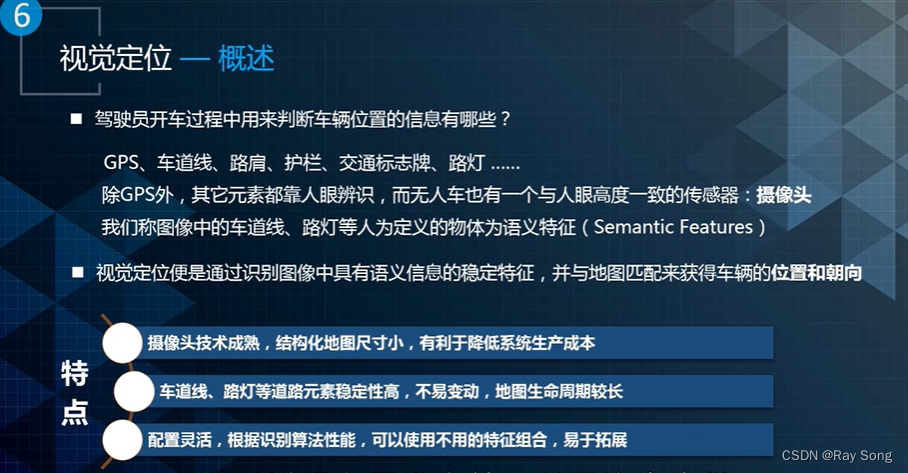
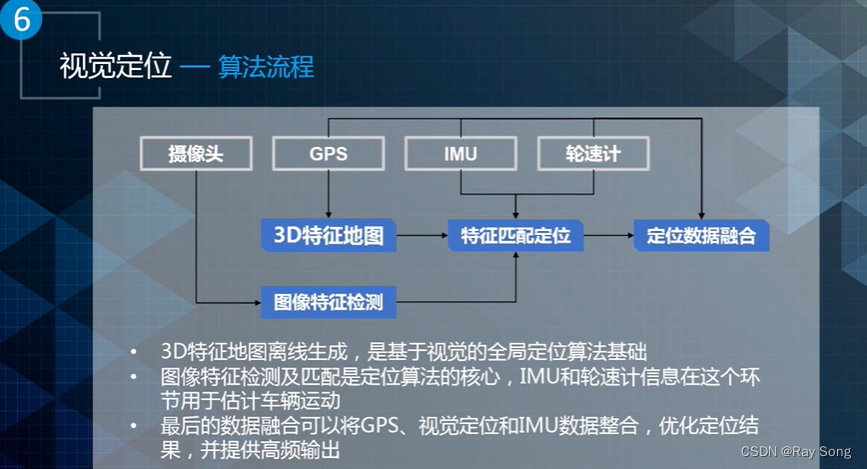
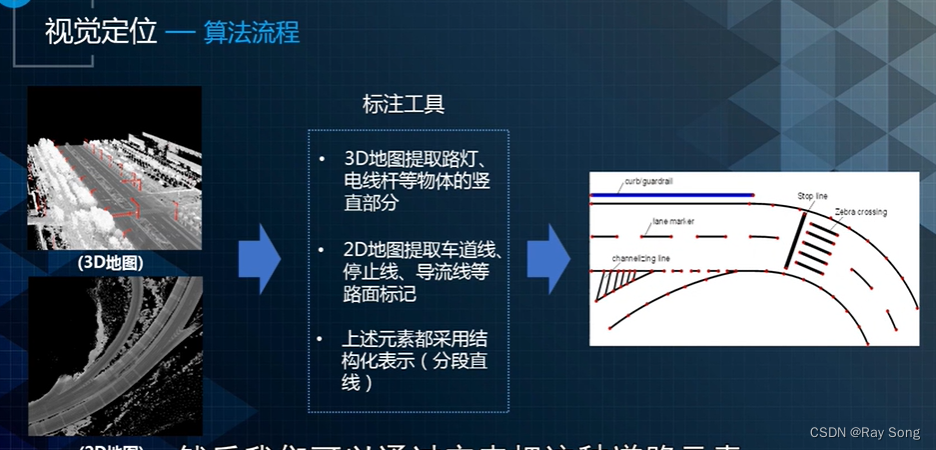
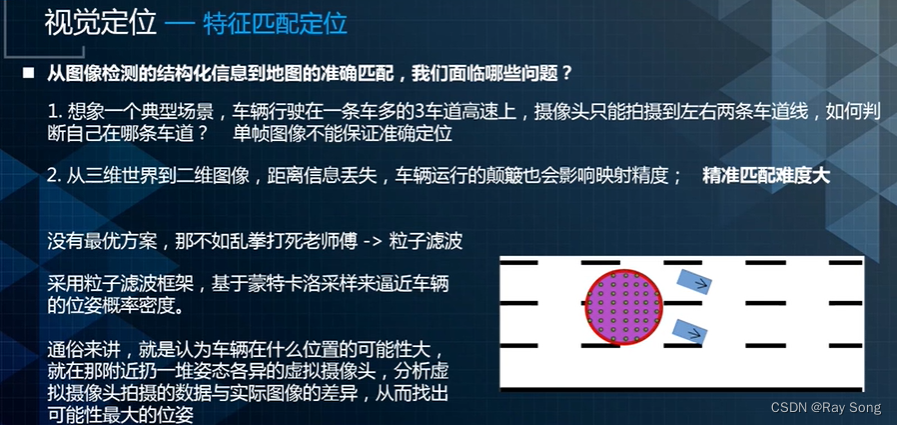
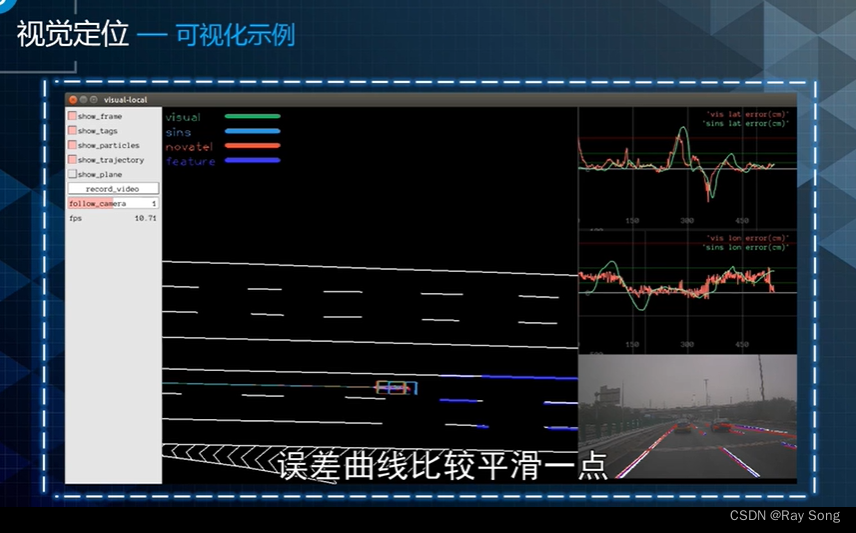
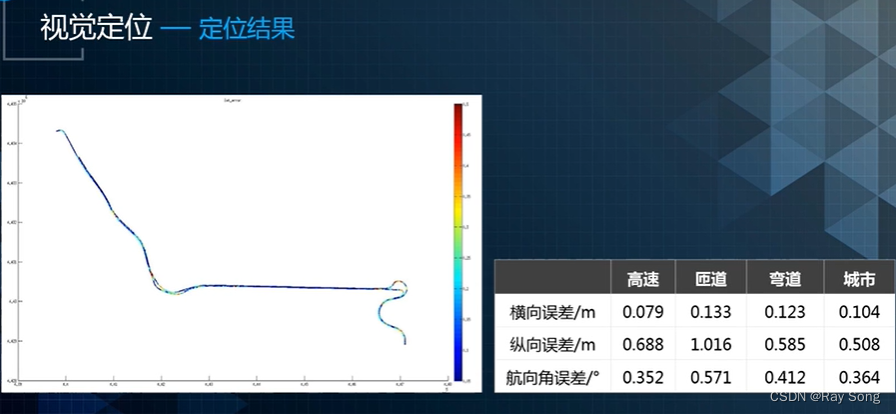
4.4 视觉定位技术

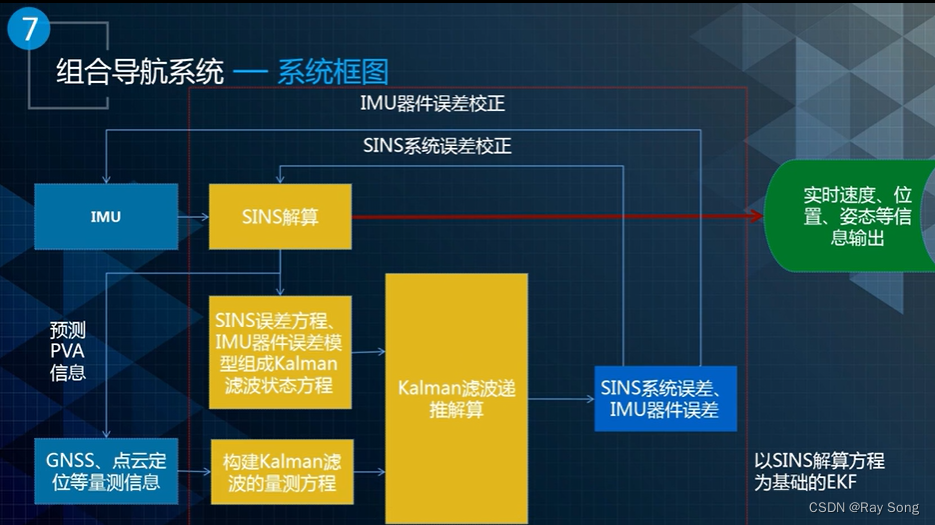
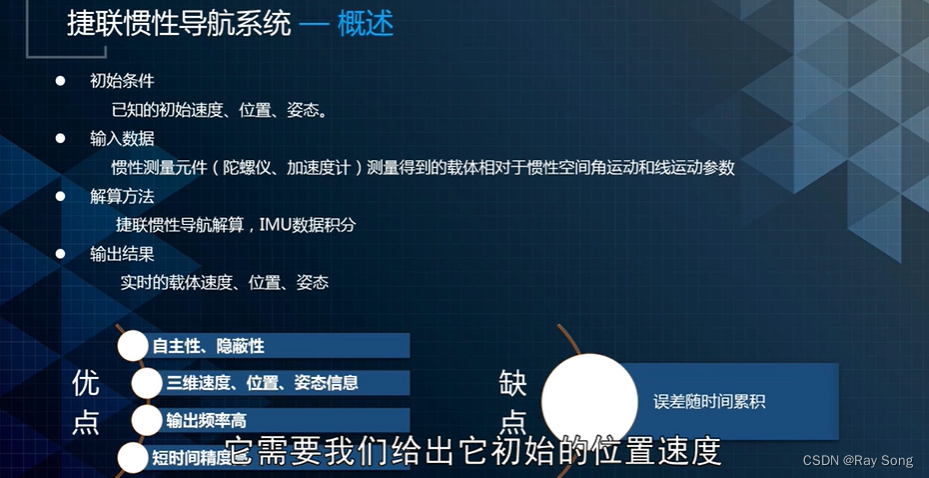
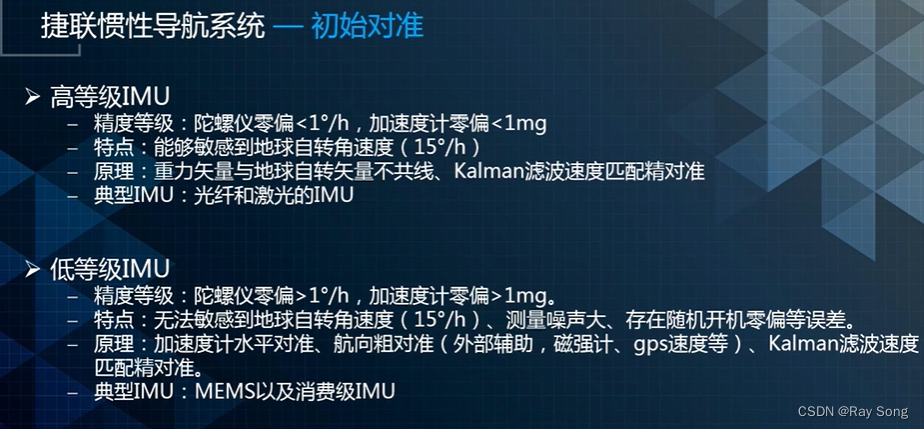
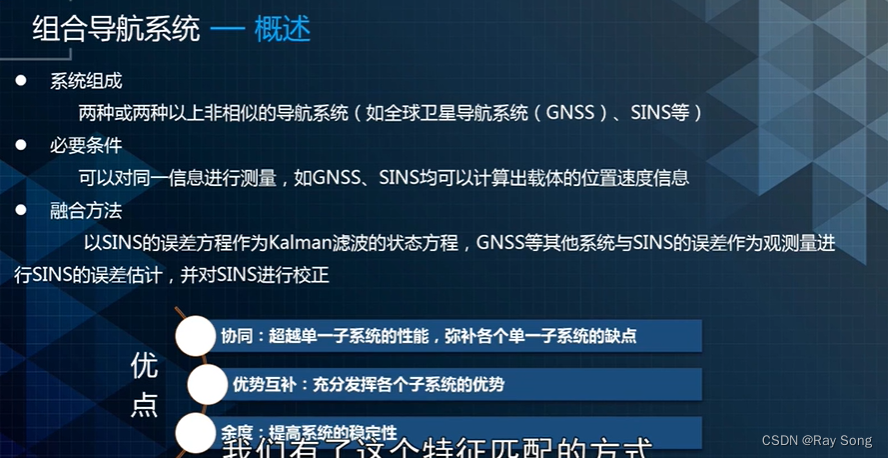
4.5 惯性导航和组合导航
双天线的优化方式 - 或者车开起来
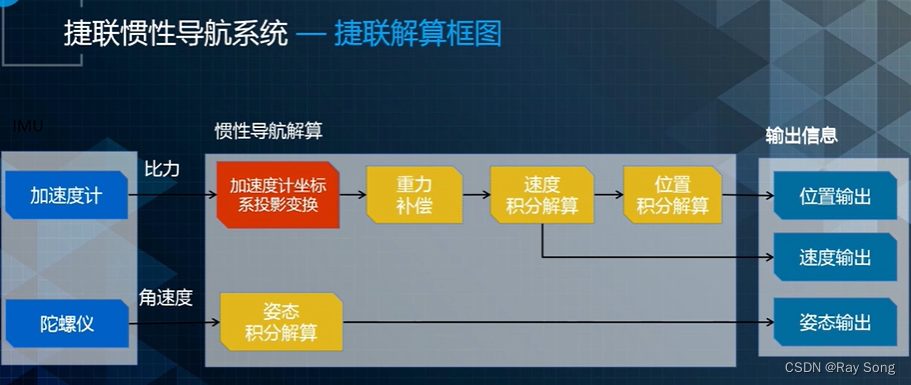
SINS 惯导系统的统称