文章目录
- 9.1 预备知识
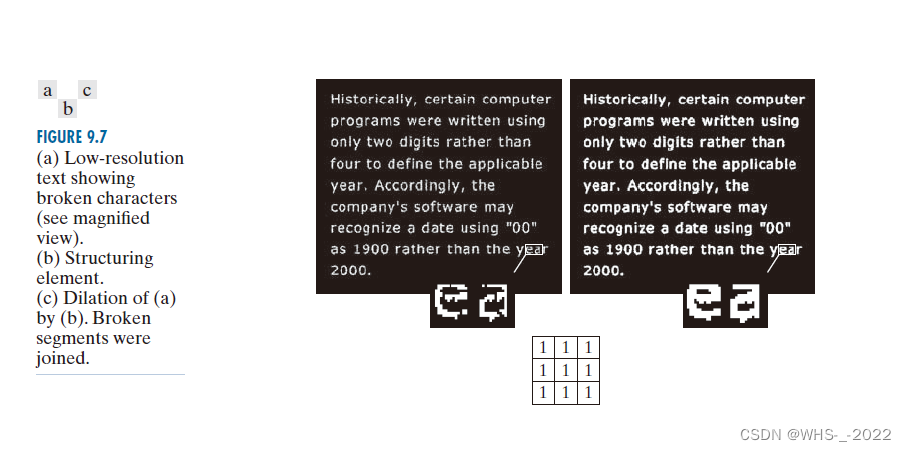
- 9.2 腐蚀和膨胀
- 9.3 开运算与闭运算
- 9.5 一些基本的形态学算法
- 9.8 灰度级形态学
9.1 预备知识
形态学运算是用 集合 来定义的 。 在图像处理中 使用两类像素集合的形态学:目标元素 和 结构元 SE 。 通常目标定义为前景像素集合,结构元可以按照前景像素和背景像素来规定 。
集合(结构元) B B B 相对于其原点的反射(表示为 B ^ \hat{B} B^),定义如下:
B ^ = { w ∣ w = − b , b ∈ B } \hat{B}=\{w \mid w=-b, b \in B\} B^={w∣w=−b,b∈B}

集合 B B B 相对于点 z = ( z 1 , z 2 ) z=(z1, z2) z=(z1,z2) 的平移(表示为 ( B ) z (B)_z (B)z),定义如下:
( B ) z = { c ∣ c = b + z , b ∈ B } (B)_{z}=\{c \mid c=b+z, b \in B\} (B)z={c∣c=b+z,b∈B}
9.2 腐蚀和膨胀
B B B 对 A A A 的 腐蚀:
A ⊖ B = { z ∣ ( B ) z ⊆ A } A \ominus B=\left\{z \mid(B)_{z} \subseteq A\right\} A⊖B={z∣(B)z⊆A}

B B B 对 A A A 的膨胀:
A ⊕ B = { z ∣ ( B ^ ) z ∩ A ≠ ∅ } A \oplus B=\left\{z \mid(\hat{B})_{z} \cap A \neq \varnothing\right\} A⊕B={z∣(B^)z∩A=∅}
腐蚀和膨胀相对于补集和反射彼此对偶,即:
( A ⊖ B ) c = A c ⊕ B ^ ( A ⊕ B ) c = A c ⊖ B ^ \begin{array}{l} (A\ominus B)^{c}=A^{c} \oplus \hat{B}\\ \\ (A \oplus B)^{c}=A^{c} \ominus \hat{B} \end{array} (A⊖B)c=Ac⊕B^(A⊕B)c=Ac⊖B^
9.3 开运算与闭运算
开运算:通常平滑物体的轮廓、断开较窄的狭颈、消除细长的突出物。删除比结构元更窄区域的能力,是形态学开运算的关键特征之一。
闭运算:同样能平滑轮廓,但与开运算相反,它通常会弥合较窄的断裂和细长的沟壑,消除小孔,并填补轮廓中的缝隙。
结构元 B B B 对集合 A A A 的开运算:(先腐蚀再膨胀)
A ∘ B = ( A ⊖ B ) ⊕ B A \circ B=(A \ominus B) \oplus B A∘B=(A⊖B)⊕B

结构元 B B B 对集合 A A A 的闭运算:(先膨胀再腐蚀)
A ⋅ B = ( A ⊕ B ) ⊖ B A \cdot B=(A \oplus B) \ominus B A⋅B=(A⊕B)⊖B

闭运算的边界是 B B B 在不进入 A A A 任何部分的前提下,由 B B B 可以到达的最远的那些点决定的。
开运算和闭运算相对于补集和反射彼此对偶:
( A ∘ B ) c = ( A c ∙ B ^ ) ( A ∙ B ) c = ( A c ∘ B ^ ) \begin{array}{l} (A \circ B)^{c}=\left(A^{c} \bullet \hat{B}\right) \\ \\ (A \bullet B)^{c}=\left(A^{c} \circ \hat{B}\right) \end{array} (A∘B)c=(Ac∙B^)(A∙B)c=(Ac∘B^)
9.5 一些基本的形态学算法
前景像素集合 A A A 的边界 β ( A ) β(A) β(A) 可按如下方式得到:首先用合适的结构元 B B B 腐蚀 A A A,然后求 A A A 和 B B B 腐蚀结果的差集。即:
β ( A ) = A − ( A ⊖ B ) \beta(A)=A-(A \ominus B) β(A)=A−(A⊖B)

9.8 灰度级形态学
了解灰度形态学:灰度腐蚀和膨胀、灰度开、闭运算;
基本算法:形态学平滑、形态学梯度、顶帽变换和底帽变换、粒度测定、纹理分割、灰度级形态学重建。
顶帽变换的一个重要用途是校正不均匀光照的影响。