目 录
摘 要 I
Abstract II
1 绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状 1
1.3 主要研究内容 2
2自主式模块化无人机的总体结构设计 3
2.1结构形式 3
2.2工作原理 3
2.3机架及桨叶的选择 5
2.3.1 单个桨叶空气动力分析及桨叶的选择 5
2.3.2材料的选择 6
2.3.3机架结构分析与优化 7
3硬件器材选择 8
3.1电机 8
3.1.1电机的分类与介绍 8
3.1.2电机参数简介与选择 9
3.2电调的选择 11
3.3电池的选择 12
4飞行控制器 15
4.1飞行姿态模型分析 15
4.2飞控调试 20
4.3飞行模式配置 21
5遥控设备的选择 23
参考文献 25
致 谢 27
1.3 主要研究内容
主要内容是在四旋翼无人无人机相关技术的基础上进行研究和分析,选择出最佳的配件来组装一架自主式模块化无人机并进行优化,将从无人无人机的机架、飞行控制器、电机、电调、电池、遥控装置等几个主要配件进行分析优化,选出最佳的配件来组装一架自主式模块化无人机。从几个不同方面对四轴无人机做的全面的研究,具体内容将通过六个章节进行描述,各章的主要内容如下:
第一章:重点介绍自主式模块化无人机的发展历程和国内外发展现状,分析了自主式模块化无人机的研究意义。
第二章:首先对自主式模块化无人机的机架结构进行了介绍,然后对六旋翼无人机的原理进行了介绍以及飞行姿态的介绍,最后是根据工作的要求对自主式模块化无人机的机架进行分析和选择。
第三章:首先对有刷电机、无刷的种类进行介绍,然后对电机的选择进行分析,最后根据自主式模块化无人机的运载要求选择合适的电机。
第四章:首先对有刷电调、无刷电调的工作原理进行介绍,然后对电机的选择进行分析,最后根据自主式模块化无人机的电机载荷要求选择最佳的电调。
第五章:首先对各种充电电池的各种特征进行介绍,然后解析锂聚合物电池的各项参数和性能,最后根据自主式模块化无人机的工作要求选择最佳电池作为无人机的工作电源。
第六章:首先对APM飞行控制器进行介绍,然后根据飞行姿态的模型表示,使地面软件对APM飞行控制器进行调试,最后解释APM飞行控制下可编辑的几种飞行模式。
第七章:首先对遥控器常用信号进行介绍,然后对遥控器的种类进行介绍分析,最后根据飞行半径的要求选出合适的遥控器。
第八章:首先对自主式模块化无人机的配件选择进行总结,然后对所存在的不足进行阐述,最后对自主式模块化无人机存在的一些不足假设出相应的弥补措施。
2自主式模块化无人机的总体结构设计
2.1结构形式
自主式模块化无人机通常采用六个旋翼作为无人机的动力源。六个旋翼处于同一高度平面。相邻两旋翼,一个逆时针旋转,一个顺时针旋转,六个电机对称的安装在无人机的支架末端,且对角线上相对的两旋翼旋向相反[6]。支架中间的工作台上层安放信号接送机、GPS定位系统,中间层安放飞行控制计算器、电流电调集成板。下层安放无人机锂电池,以及航拍所需要的云台、相机及图形传送系统[7]。六旋翼最大的优点在于升级空间广阔,不仅可以运载摄像头,还可以卸载摄像头后在工作台下层按照其他设备。自主式模块化无人机的结构形式见图2-1。
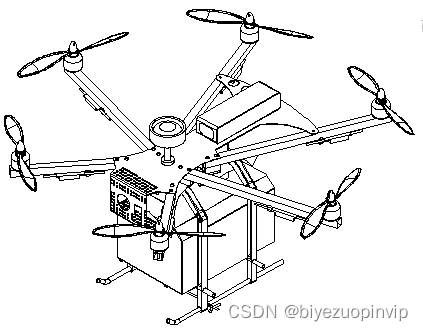
图2-1 机架图