1. 论文和代码
论文:https://openaccess.thecvf.com/content_CVPR_2020/papers/Huang_PF-Net_Point_Fractal_Network_for_3D_Point_Cloud_Completion_CVPR_2020_paper.pdf![]() https://openaccess.thecvf.com/content_CVPR_2020/papers/Huang_PF-Net_Point_Fractal_Network_for_3D_Point_Cloud_Completion_CVPR_2020_paper.pdf
https://openaccess.thecvf.com/content_CVPR_2020/papers/Huang_PF-Net_Point_Fractal_Network_for_3D_Point_Cloud_Completion_CVPR_2020_paper.pdf

作者来自上海交通大学和上汤科技的大佬,发表在2020CVPR。
代码:
https://github.com/zztianzz/PF-Net-Point-Fractal-Network![]() https://github.com/zztianzz/PF-Net-Point-Fractal-Network
https://github.com/zztianzz/PF-Net-Point-Fractal-Network
2. 论文阅读笔记
2.1 目的和框架
该PF-Net要做的是点云补全,即将有残缺的点云数据(比如上图飞机少了机头,或者凳子少了腿),通过一些技术补全为完整的点云数据。
简单来讲,PF-Net输入残缺后点云(飞机的机身),输出残缺的部分点云(飞机的机尾),端对端训练,作为生成器网络,生成残缺点云,再接一个判别器网络。
该网络的特点:不改变原始的数据,只生成残缺部分的点云数据。即机身的点云数据不变,直接生成机头部分的点云。
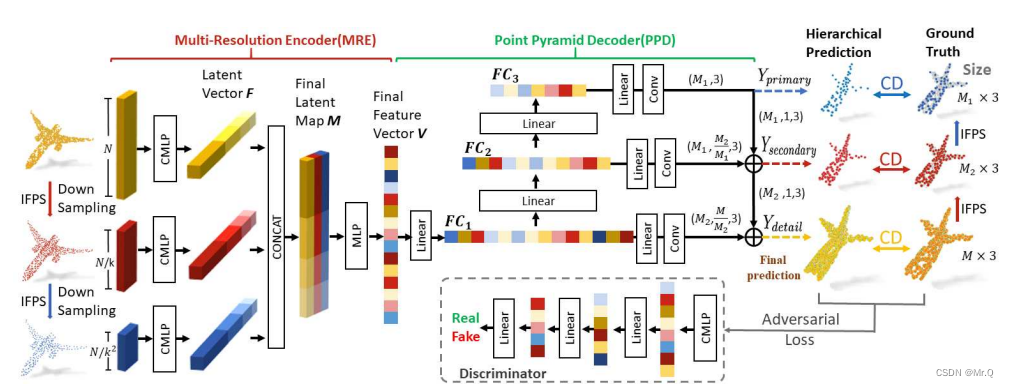
算法步骤:
(1)原始的黄色点云输入数据,经过了两次IFPS下采样,获得三种尺度的点云输入数据,其中N是原始的点云中点的个数,k是下采样倍数;
(2)再经过CMLP全链接网络,获得Latent vector F;
(3)再将各个latent vector拼接起来获得Final Laten Map M;
(4)接一个MLP和Linear全链接网络,再使用FPN特征金字塔作为解码网络,获取三种尺度下的残缺点云数据;
(5)对原始尺度下的残缺点云预测加一个判别器网络,使其生成的残缺数据更真实。
下面对各个部件,从输入到输出一个一个梳理。
2.2 IFPS 下采样
Iterative farthest point sampling (IFPS),迭代最远点采样(技术来自Pointnet++),采集点云数据中骨架点点集合,通俗的将不破坏点云整体结构的情况下,就是只保留一些点。用该技术进行才采样比CNNs更快。

上图,原始台灯有 2048个点,即使下采样到128个点(保留了6.25%),依然很好的保留了台灯的基本骨架。
待续

![[附源码]计算机毕业设计JAVA学生宿舍设备报修](https://img-blog.csdnimg.cn/b3be303ed30d4069a8273e4d1ce541a7.png)







![[附源码]Python计算机毕业设计Django健身生活系统论文](https://img-blog.csdnimg.cn/e6f30804310542dd9666ad055f8023e3.png)