本文介绍ChatGLM-6B的模型结构,代码来自https://huggingface.co/THUDM/chatglm-6b/blob/main/modeling_chatglm.py。
相关博客
【自然语言处理】【大模型】ChatGLM-6B模型结构代码解析(单机版)
【自然语言处理】【大模型】BLOOM模型结构源码解析(单机版)
【自然语言处理】【大模型】极低资源微调大模型方法LoRA以及BLOOM-LORA实现代码
【深度学习】【分布式训练】Collective通信操作及Pytorch示例
【自然语言处理】【大模型】Chinchilla:训练计算利用率最优的大语言模型
【自然语言处理】【大模型】大语言模型BLOOM推理工具测试
【自然语言处理】【大模型】GLM-130B:一个开源双语预训练语言模型
【自然语言处理】【大模型】用于大型Transformer的8-bit矩阵乘法介绍
【自然语言处理】【大模型】BLOOM:一个176B参数且可开放获取的多语言模型
【自然语言处理】【ChatGPT系列】FLAN:微调语言模型是Zero-Shot学习器
【自然语言处理】【ChatGPT系列】ChatGPT的智能来自哪里?
【自然语言处理】【ChatGPT系列】大模型的涌现能力
一、激活函数
ChatGLM-6B使用的激活函数为GELU,其可以近似实现为:
GELU
(
x
)
≈
0.5
x
(
1
+
tanh
(
2
π
(
x
+
0.044715
x
3
)
)
)
\text{GELU}(x)\approx 0.5x(1+\tanh(\sqrt{\frac{2}{\pi}}(x+0.044715x^3))) \\
GELU(x)≈0.5x(1+tanh(π2(x+0.044715x3)))
@torch.jit.script
def gelu_impl(x):
"""OpenAI's gelu implementation."""
return 0.5 * x * (1.0 + torch.tanh(0.7978845608028654 * x *
(1.0 + 0.044715 * x * x)))
def gelu(x):
return gelu_impl(x)
二、GLU层
虽然在实现代码中命名为GLU,但这里实现的还是MLP层:
GLU
(
X
)
=
GELU
(
X
W
1
)
W
2
\text{GLU}(X)=\text{GELU}(XW_1)W_2
GLU(X)=GELU(XW1)W2
class GLU(torch.nn.Module):
def __init__(self, hidden_size, inner_hidden_size=None,
layer_id=None, bias=True, activation_func=gelu, params_dtype=torch.float, empty_init=True):
super(GLU, self).__init__()
if empty_init:
init_method = skip_init
else:
init_method = default_init
self.layer_id = layer_id
self.activation_func = activation_func
# Project to 4h.
self.hidden_size = hidden_size
if inner_hidden_size is None:
inner_hidden_size = 4 * hidden_size
self.inner_hidden_size = inner_hidden_size
self.dense_h_to_4h = init_method(
torch.nn.Linear,
self.hidden_size,
self.inner_hidden_size,
bias=bias,
dtype=params_dtype,
)
# Project back to h.
self.dense_4h_to_h = init_method(
torch.nn.Linear,
self.inner_hidden_size,
self.hidden_size,
bias=bias,
dtype=params_dtype,
)
def forward(self, hidden_states):
"""
hidden_states: [seq_len, batch, hidden_size]
"""
# [seq_len, batch, inner_hidden_size]
# 投影
intermediate_parallel = self.dense_h_to_4h(hidden_states)
# 激活
intermediate_parallel = self.activation_func(intermediate_parallel)
# 投影
output = self.dense_4h_to_h(intermediate_parallel)
return output
三、位置编码:RoPE
1. 原理
位置编码采用RoPE,推导过程很有启发性,建议去看原文:Transformer升级之路:2、博采众长的旋转式位置编码 - 科学空间。本文仅介绍其实现:
总的来说,RoPE的目标是构建一个位置相关的投影矩阵,使得
(
R
m
q
)
⊤
(
R
n
k
)
=
q
⊤
R
m
⊤
R
n
k
=
q
⊤
R
n
−
m
k
(\textbf{R}_m\textbf{q})^\top(\textbf{R}_n\textbf{k})=\textbf{q}^\top\textbf{R}_m^\top\textbf{R}_n\textbf{k}=\textbf{q}^\top\textbf{R}_{n-m}\textbf{k} \\
(Rmq)⊤(Rnk)=q⊤Rm⊤Rnk=q⊤Rn−mk
其中,
q
\textbf{q}
q和
k
\textbf{k}
k分别对应注意力机制中的query和key向量,
m
m
m和
n
n
n代表两个位置,
R
i
\textbf{R}_i
Ri表示位置
i
i
i处的投影矩阵。下面是作者建议
R
\textbf{R}
R的形式:
R
θ
,
m
d
=
[
cos
m
θ
1
−
sin
m
θ
1
0
0
…
0
0
sin
m
θ
1
cos
m
θ
1
0
0
…
0
0
0
0
cos
m
θ
2
−
sin
m
θ
2
…
0
0
0
0
sin
m
θ
2
cos
m
θ
2
…
0
0
⋮
⋮
⋮
⋮
⋱
⋮
⋮
0
0
0
0
…
cos
m
θ
d
/
2
−
sin
m
θ
d
/
2
0
0
0
0
…
sin
m
θ
d
/
2
cos
m
θ
d
/
2
]
\textbf{R}^{d}_{\theta,m}= \begin{bmatrix} \cos m\theta_1 & -\sin m\theta_1 & 0 & 0 & \dots & 0 & 0 \\ \sin m\theta_1 & \cos m\theta_1 & 0 & 0 & \dots & 0 & 0 \\ 0 & 0 & \cos m\theta_2 & -\sin m\theta_2 & \dots & 0 & 0 \\ 0 & 0 & \sin m\theta_2 & \cos m\theta_2 & \dots & 0 & 0 \\ \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots & \\ 0 & 0 & 0 & 0 & \dots & \cos m\theta_{d/2} & -\sin m\theta_{d/2} \\ 0 & 0 & 0 & 0 & \dots & \sin m\theta_{d/2} & \cos m\theta_{d/2} \end{bmatrix}
Rθ,md=
cosmθ1sinmθ100⋮00−sinmθ1cosmθ100⋮0000cosmθ2sinmθ2⋮0000−sinmθ2cosmθ2⋮00…………⋱……0000⋮cosmθd/2sinmθd/20000⋮−sinmθd/2cosmθd/2
其中,
d
d
d是query和key的维度,
θ
\theta
θ是一个超参数。
通常,
θ
\theta
θ会设置为
θ
=
{
θ
i
=
1000
0
−
2
(
i
−
1
)
d
,
i
∈
[
1
,
2
,
…
,
d
2
]
}
\theta=\Big\{\theta_i=10000^{\frac{-2(i-1)}{d}},i\in[1,2,\dots,\frac{d}{2}]\Big\}
θ={θi=10000d−2(i−1),i∈[1,2,…,2d]}
由于矩阵
R
\textbf{R}
R非常稀疏,为了提供运算速度,作者也给出了实现方式,以query向量
q
\textbf{q}
q为例:
[
q
0
q
1
q
2
q
3
⋮
q
d
−
2
q
d
−
1
]
⊗
[
cos
m
θ
0
cos
m
θ
0
cos
m
θ
1
cos
m
θ
1
⋮
cos
m
θ
d
/
2
−
1
cos
m
θ
d
/
2
−
1
]
+
[
−
q
1
q
0
−
q
3
q
2
⋮
−
q
d
−
1
q
d
−
2
]
⊗
[
sin
m
θ
0
sin
m
θ
0
sin
m
θ
1
sin
m
θ
1
⋮
sin
m
θ
d
/
2
−
1
sin
m
θ
d
/
2
−
1
]
\begin{bmatrix} q_0 \\ q_1 \\ q_2 \\ q_3 \\ \vdots \\ q_{d-2} \\ q_{d-1} \end{bmatrix} \otimes \begin{bmatrix} \cos m\theta_0 \\ \cos m\theta_0 \\ \cos m\theta_1 \\ \cos m\theta_1 \\ \vdots \\ \cos m\theta_{d/2-1} \\ \cos m\theta_{d/2-1} \end{bmatrix} + \begin{bmatrix} -q_1 \\ q_0 \\ -q_3 \\ q_2 \\ \vdots \\ -q_{d-1} \\ q_{d-2} \end{bmatrix} \otimes \begin{bmatrix} \sin m\theta_0 \\ \sin m\theta_0 \\ \sin m\theta_1 \\ \sin m\theta_1 \\ \vdots \\ \sin m\theta_{d/2-1} \\ \sin m\theta_{d/2-1} \end{bmatrix} \\
q0q1q2q3⋮qd−2qd−1
⊗
cosmθ0cosmθ0cosmθ1cosmθ1⋮cosmθd/2−1cosmθd/2−1
+
−q1q0−q3q2⋮−qd−1qd−2
⊗
sinmθ0sinmθ0sinmθ1sinmθ1⋮sinmθd/2−1sinmθd/2−1
2. 实现
ChatGLM-6B实现采用了PaLM的实现方式,不同于上面的公式:
[
q
0
⋮
q
d
/
2
−
1
q
d
/
2
⋮
q
d
−
1
]
⊗
[
cos
m
θ
0
⋮
cos
m
θ
d
/
2
−
1
cos
m
θ
0
⋮
cos
m
θ
d
/
2
−
1
]
+
[
−
q
d
/
2
⋮
−
q
d
−
1
q
0
⋮
q
d
/
2
−
1
]
⊗
[
sin
m
θ
0
⋮
sin
m
θ
d
/
2
−
1
sin
m
θ
0
⋮
sin
m
θ
d
/
2
−
1
]
\begin{bmatrix} q_0 \\ \vdots \\ q_{d/2-1} \\ q_{d/2} \\ \vdots \\ q_{d-1}\end{bmatrix} \otimes \begin{bmatrix} \cos m\theta_0 \\ \vdots \\ \cos m\theta_{d/2-1} \\ \cos m\theta_0 \\ \vdots \\ \cos m\theta_{d/2-1} \end{bmatrix} + \begin{bmatrix} -q_{d/2} \\ \vdots \\ -q_{d-1} \\ q_0 \\ \vdots \\ q_{d/2-1}\end{bmatrix} \otimes \begin{bmatrix} \sin m\theta_0 \\ \vdots \\ \sin m\theta_{d/2-1} \\ \sin m\theta_0 \\ \vdots \\ \sin m\theta_{d/2-1} \end{bmatrix}
q0⋮qd/2−1qd/2⋮qd−1
⊗
cosmθ0⋮cosmθd/2−1cosmθ0⋮cosmθd/2−1
+
−qd/2⋮−qd−1q0⋮qd/2−1
⊗
sinmθ0⋮sinmθd/2−1sinmθ0⋮sinmθd/2−1
方便验证,该位置编码仍然满足对称性
(
R
m
q
)
⊤
(
R
n
k
)
=
q
⊤
R
n
−
m
k
(\textbf{R}_m\textbf{q})^\top(\textbf{R}_n\textbf{k})=\textbf{q}^\top\textbf{R}_{n-m}\textbf{k}
(Rmq)⊤(Rnk)=q⊤Rn−mk。但是其是如何推导而来的,暂时还没想清楚。
在代码中,RotaryEmbedding负责预先计算sin和cos;rotate_half负责上式第二项中,互换向量的奇偶位以及取负操作;apply_rotary_pos_emb_index则是对输入的query和key注入RoPE。
class RotaryEmbedding(torch.nn.Module):
def __init__(self, dim, base=10000, precision=torch.half, learnable=False):
super().__init__()
# 预先计算好上面的theta
inv_freq = 1. / (base ** (torch.arange(0, dim, 2).float() / dim))
inv_freq = inv_freq.half()
# learnable的效果并没有更好,通常learnable为False
self.learnable = learnable
if learnable:
self.inv_freq = torch.nn.Parameter(inv_freq)
self.max_seq_len_cached = None
else:
self.register_buffer('inv_freq', inv_freq)
self.max_seq_len_cached = None
self.cos_cached = None
self.sin_cached = None
self.precision = precision
def _load_from_state_dict(self, state_dict, prefix, local_metadata, strict, missing_keys, unexpected_keys,
error_msgs):
pass
def forward(self, x, seq_dim=1, seq_len=None):
if seq_len is None:
seq_len = x.shape[seq_dim]
if self.max_seq_len_cached is None or (seq_len > self.max_seq_len_cached):
self.max_seq_len_cached = None if self.learnable else seq_len
t = torch.arange(seq_len, device=x.device, dtype=self.inv_freq.dtype)
# 这里使用了爱因斯坦求和约定,该操作就是t和self.inv_freq的外积
# freqs中保存了所有的m\theta。e.g. 第一列是0\theta、第二列是1\theta
freqs = torch.einsum('i,j->ij', t, self.inv_freq)
# 根据上面的公式,每个\theta都需要两份,所以这里将两个freqs拼接起来
emb = torch.cat((freqs, freqs), dim=-1).to(x.device)
if self.precision == torch.bfloat16:
emb = emb.float()
# [seq_length, 1 (b * np), hn]
# 计算cos和sin
cos_cached = emb.cos()[:, None, :]
sin_cached = emb.sin()[:, None, :]
if self.precision == torch.bfloat16:
cos_cached = cos_cached.bfloat16()
sin_cached = sin_cached.bfloat16()
if self.learnable:
return cos_cached, sin_cached
# 缓存结果,方便重复利用
self.cos_cached, self.sin_cached = cos_cached, sin_cached
return self.cos_cached[:seq_len, ...], self.sin_cached[:seq_len, ...]
def _apply(self, fn):
if self.cos_cached is not None:
self.cos_cached = fn(self.cos_cached)
if self.sin_cached is not None:
self.sin_cached = fn(self.sin_cached)
return super()._apply(fn)
def rotate_half(x):
# x1是x的前半部分,x2是x的后半部分
x1, x2 = x[..., :x.shape[-1] // 2], x[..., x.shape[-1] // 2:]
# 前后互换,且后半部分取负
return torch.cat((-x2, x1), dim=x1.ndim - 1)
@torch.jit.script
def apply_rotary_pos_emb_index(q, k, cos, sin, position_id):
cos, sin = F.embedding(position_id, cos.squeeze(1)).unsqueeze(2), \
F.embedding(position_id, sin.squeeze(1)).unsqueeze(2)
q, k = (q * cos) + (rotate_half(q) * sin), (k * cos) + (rotate_half(k) * sin)
return q, k
四、注意力层
1. 原理
二维位置编码。这里仍然采用了GLM-10B的二维位置编码,如下图所示:
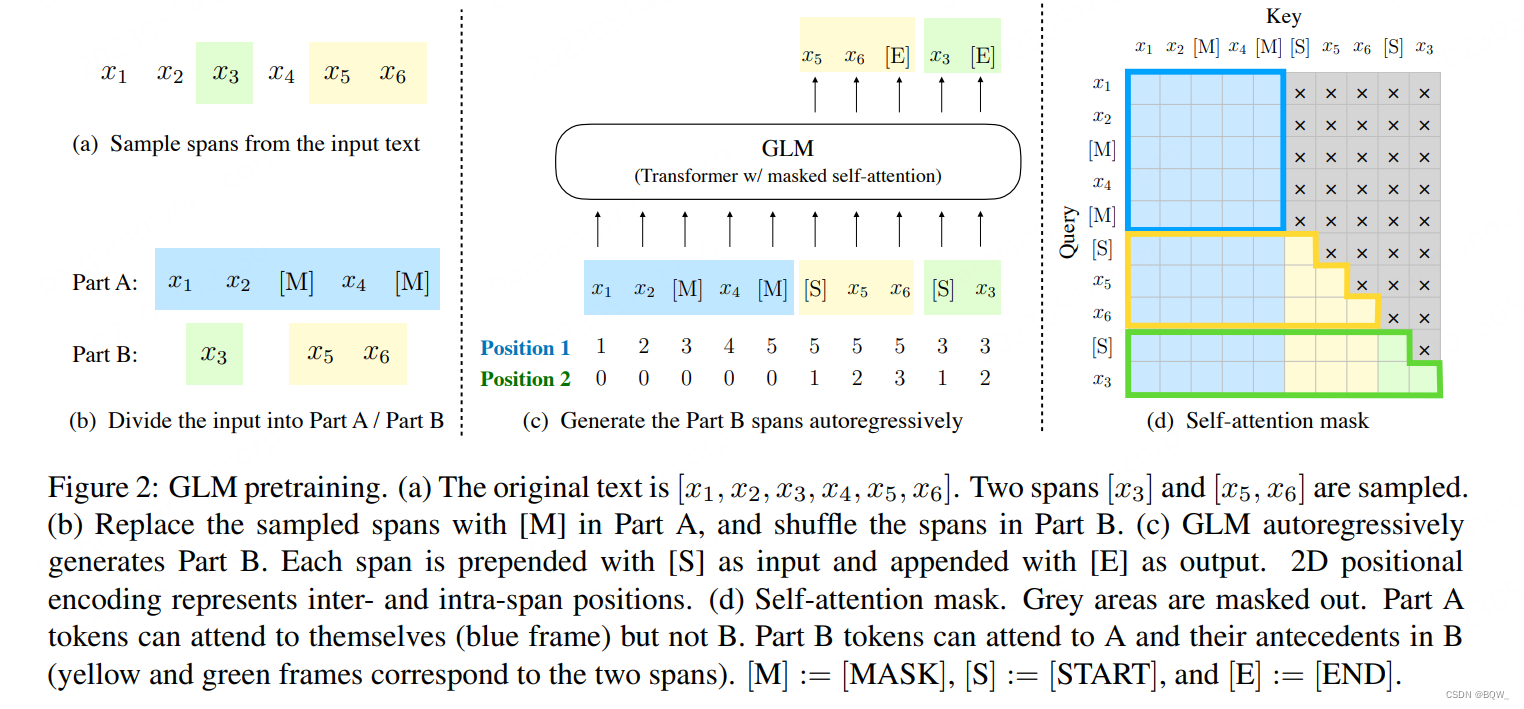
输入的样本是 x 1 , x 2 , x 3 , x 4 , x 5 , x 6 x_1,x_2,x_3,x_4,x_5,x_6 x1,x2,x3,x4,x5,x6,片段 x 3 x_3 x3和 x 5 , x 6 x_5,x_6 x5,x6被随机挑选遮蔽掉,原始的输入样本变为 x 1 , x 2 , [ M ] , x 4 , [ M ] x_1,x_2,[M],x_4,[M] x1,x2,[M],x4,[M],这个过程如上图(a)和(b)所示。将三个片段拼接在一起得到模型的输入 x 1 , x 2 , [ M ] , x 4 , [ M ] , [ S ] , x 5 , x 6 , [ S ] , x 3 x_1,x_2,[M],x_4,[M],[S],x_5,x_6,[S],x_3 x1,x2,[M],x4,[M],[S],x5,x6,[S],x3,模型的输出则是被遮蔽掉的片段,如上图©所示。这里使用了2种位置编码:第一种编码为整个输入注入位置信息,能够表示遮蔽片段在原始输入中的位置;第二种位置编码则是为遮蔽片段内的tokens输入位置信息。
自注意力机制。标准的自注意力机制为:
Q
=
W
q
X
K
=
W
k
X
V
=
W
v
X
Attention
(
Q
,
K
,
V
,
A
)
=
softmax
(
Q
K
T
d
k
)
V
\begin{align} Q &= W_q X \\ K &= W_k X \\ V &= W_v X \\ \text{Attention}(Q,K,V,A) &= \text{softmax}(\frac{QK^T}{\sqrt{d_k}})V \end{align} \\
QKVAttention(Q,K,V,A)=WqX=WkX=WvX=softmax(dkQKT)V
其中,X是输入,
W
q
,
W
k
,
W
v
W_q,W_k,W_v
Wq,Wk,Wv 分别是query、key、value的投影矩阵。相比于标准的注意力机制,ChatGLM-6B在
Q
Q
Q和
K
K
K中注意力了RoPE位置信息。多头注意力就是将多个单头注意力的结果拼接起来。
head
i
=
Attention
(
Q
i
,
K
i
,
V
i
,
A
i
)
MultiHead
(
Q
,
K
,
V
,
A
)
=
Concat
(
head
1
,
…
,
head
h
)
W
o
\begin{align} \text{head}_i&=\text{Attention}(Q_i,K_i,V_i,A_i) \\ \text{MultiHead}(Q,K,V,A)&=\text{Concat}(\text{head}_1,\dots,\text{head}_h)W_o \end{align} \\
headiMultiHead(Q,K,V,A)=Attention(Qi,Ki,Vi,Ai)=Concat(head1,…,headh)Wo
2. 实现
- 函数
attention_fn实现了标准的自注意力机制。
def attention_fn(
self,
query_layer,
key_layer,
value_layer,
attention_mask,
hidden_size_per_partition,
layer_id,
layer_past=None,
scaling_attention_score=True,
use_cache=False,
):
# 将传递来的key和value合并至当前的Q和K上(推理场景)
if layer_past is not None:
past_key, past_value = layer_past[0], layer_past[1]
key_layer = torch.cat((past_key, key_layer), dim=0)
value_layer = torch.cat((past_value, value_layer), dim=0)
# seqlen, batch, num_attention_heads, hidden_size_per_attention_head
seq_len, b, nh, hidden_size = key_layer.shape
if use_cache:
present = (key_layer, value_layer)
else:
present = None
# 对query层进行scaling
query_key_layer_scaling_coeff = float(layer_id + 1)
if scaling_attention_score:
query_layer = query_layer / (math.sqrt(hidden_size) * query_key_layer_scaling_coeff)
# 注意力分数的输出形状: [batch_size, num_heads, seq_length, seq_length]
output_size = (query_layer.size(1), query_layer.size(2), query_layer.size(0), key_layer.size(0))
# 形状重塑:[seq_length, batch_size, num_heads, head_dim] ->
# [seq_length, batch_size*num_heads, head_dim]
query_layer = query_layer.view(output_size[2], output_size[0] * output_size[1], -1)
key_layer = key_layer.view(output_size[3], output_size[0] * output_size[1], -1)
matmul_result = torch.zeros(
1, 1, 1,
dtype=query_layer.dtype,
device=query_layer.device,
)
# 计算非规范化的注意力分数,matmul_result形状为[batch_size*num_head, seq_length,seq_length]
matmul_result = torch.baddbmm(
matmul_result,
query_layer.transpose(0, 1), # [b * np, sq, hn]
key_layer.transpose(0, 1).transpose(1, 2), # [b * np, hn, sk]
beta=0.0,
alpha=1.0,
)
# 重塑形状为:[batch_size,num_head,seq_length,seq_length]
attention_scores = matmul_result.view(*output_size)
# 对注意分数进行缩放和规范化
if self.scale_mask_softmax:
self.scale_mask_softmax.scale = query_key_layer_scaling_coeff
attention_probs = self.scale_mask_softmax(attention_scores, attention_mask.contiguous())
else:
# 对注意力分数进行mask
if not (attention_mask == 0).all():
attention_scores.masked_fill_(attention_mask, -10000.0)
dtype = attention_scores.dtype
attention_scores = attention_scores.float()
attention_scores = attention_scores * query_key_layer_scaling_coeff
attention_probs = F.softmax(attention_scores, dim=-1)
attention_probs = attention_probs.type(dtype)
### 使用注意力分数对value进行加权求和
output_size = (value_layer.size(1), value_layer.size(2), query_layer.size(0), value_layer.size(3))
# 重塑value的形状
value_layer = value_layer.view(value_layer.size(0), output_size[0] * output_size[1], -1)
# 重塑注意力分数的形状
attention_probs = attention_probs.view(output_size[0] * output_size[1], output_size[2], -1)
# 注意力分数乘以value,得到最终的输出context
context_layer = torch.bmm(attention_probs, value_layer.transpose(0, 1))
context_layer = context_layer.view(*output_size)
context_layer = context_layer.permute(2, 0, 1, 3).contiguous()
new_context_layer_shape = context_layer.size()[:-2] + (hidden_size_per_partition,)
context_layer = context_layer.view(*new_context_layer_shape)
outputs = (context_layer, present, attention_probs)
return outputs
SelfAttention则是为query和key注入RoPE,然后调用attention_fn实现注意力机制。
class SelfAttention(torch.nn.Module):
def __init__(self, hidden_size, num_attention_heads,
layer_id, hidden_size_per_attention_head=None, bias=True,
params_dtype=torch.float, position_encoding_2d=True, empty_init=True):
if empty_init:
init_method = skip_init
else:
init_method = default_init
super(SelfAttention, self).__init__()
self.layer_id = layer_id
self.hidden_size = hidden_size
self.hidden_size_per_partition = hidden_size
self.num_attention_heads = num_attention_heads
self.num_attention_heads_per_partition = num_attention_heads
# position_encoding_2d:是否使用2维的位置编码
self.position_encoding_2d = position_encoding_2d
# RoPE
self.rotary_emb = RotaryEmbedding(
self.hidden_size // (self.num_attention_heads * 2)
if position_encoding_2d
else self.hidden_size // self.num_attention_heads,
base=10000,
precision=torch.half,
learnable=False,
)
self.scale_mask_softmax = None
if hidden_size_per_attention_head is None:
self.hidden_size_per_attention_head = hidden_size // num_attention_heads
else:
self.hidden_size_per_attention_head = hidden_size_per_attention_head
self.inner_hidden_size = num_attention_heads * self.hidden_size_per_attention_head
# query、key、value的投影层
self.query_key_value = init_method(
torch.nn.Linear,
hidden_size,
3 * self.inner_hidden_size,
bias=bias,
dtype=params_dtype,
)
self.dense = init_method(
torch.nn.Linear,
self.inner_hidden_size,
hidden_size,
bias=bias,
dtype=params_dtype,
)
@staticmethod
def attention_mask_func(attention_scores, attention_mask):
attention_scores.masked_fill_(attention_mask, -10000.0)
return attention_scores
def split_tensor_along_last_dim(self, tensor, num_partitions,
contiguous_split_chunks=False):
"""沿最后一个维度切分tensor
参数:
tensor: 输入tensor;
num_partitions: 切分tensor的数量;
contiguous_split_chunks: 若为True,切分的块在内存中连续;
"""
last_dim = tensor.dim() - 1
last_dim_size = tensor.size()[last_dim] // num_partitions
tensor_list = torch.split(tensor, last_dim_size, dim=last_dim)
# torch.split并不会默认创建连续的tensor
if contiguous_split_chunks:
return tuple(chunk.contiguous() for chunk in tensor_list)
return tensor_list
def forward(
self,
hidden_states: torch.Tensor,
position_ids,
attention_mask: torch.Tensor,
layer_id,
layer_past: Optional[Tuple[torch.Tensor, torch.Tensor]] = None,
use_cache: bool = False,
output_attentions: bool = False,
):
"""
hidden_states: [seq_len, batch, hidden_size]
attention_mask: [(1, 1), seq_len, seq_len]
"""
# 一次性得到投影的Q、K、V,减少执行矩阵乘法的次数
# [seq_len, batch, 3 * hidden_size]
mixed_raw_layer = self.query_key_value(hidden_states)
# 拆分出多头
# [seq_len, batch, 3 * hidden_size] --> [seq_len, batch, num_attention_heads, 3 * hidden_size_per_attention_head]
new_tensor_shape = mixed_raw_layer.size()[:-1] + (
self.num_attention_heads_per_partition,
3 * self.hidden_size_per_attention_head,
)
mixed_raw_layer = mixed_raw_layer.view(*new_tensor_shape)
# [seq_len, batch, num_attention_heads, hidden_size_per_attention_head]
# 此时的query_layer、key_layer、value_layer已经是拆分出多头的Q、K、V
(query_layer, key_layer, value_layer) = self.split_tensor_along_last_dim(mixed_raw_layer, 3)
if self.position_encoding_2d:
## 这里将query和key拆分为两份,分别注入不同的位置信息,然后再拼接在一起
# 拆分
q1, q2 = query_layer.chunk(2, dim=(query_layer.ndim - 1))
k1, k2 = key_layer.chunk(2, dim=(key_layer.ndim - 1))
# 计算cos和sin值
cos, sin = self.rotary_emb(q1, seq_len=position_ids.max() + 1)
position_ids, block_position_ids = position_ids[:, 0, :].transpose(0, 1).contiguous(), \
position_ids[:, 1, :].transpose(0, 1).contiguous()
# 将两种位置编码输入到不同的query和key上
q1, k1 = apply_rotary_pos_emb_index(q1, k1, cos, sin, position_ids)
q2, k2 = apply_rotary_pos_emb_index(q2, k2, cos, sin, block_position_ids)
# 拼接注入不同位置信息的query和key,这样query和key中包含了两种位置信息
query_layer = torch.concat([q1, q2], dim=(q1.ndim - 1))
key_layer = torch.concat([k1, k2], dim=(k1.ndim - 1))
else:
# 普通的RoPE
position_ids = position_ids.transpose(0, 1)
cos, sin = self.rotary_emb(value_layer, seq_len=position_ids.max() + 1)
# [seq_len, batch, num_attention_heads, hidden_size_per_attention_head]
query_layer, key_layer = apply_rotary_pos_emb_index(query_layer, key_layer, cos, sin, position_ids)
# [seq_len, batch, hidden_size]
context_layer, present, attention_probs = attention_fn(
self=self,
query_layer=query_layer,
key_layer=key_layer,
value_layer=value_layer,
attention_mask=attention_mask,
hidden_size_per_partition=self.hidden_size_per_partition,
layer_id=layer_id,
layer_past=layer_past,
use_cache=use_cache
)
output = self.dense(context_layer)
outputs = (output, present)
if output_attentions:
outputs += (attention_probs,)
return outputs # output, present, attention_probs
五、GLMBlock
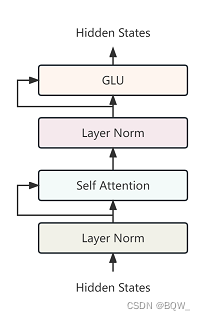
GLMBlock的基本结构为:Layer Norm、Self Attention(输入和输出残差连接)、Layer Norm、GLU(输入和输出残差连接)。
class GLMBlock(torch.nn.Module):
def __init__(
self,
hidden_size,
num_attention_heads,
layernorm_epsilon,
layer_id,
inner_hidden_size=None,
hidden_size_per_attention_head=None,
layernorm=LayerNorm,
use_bias=True,
params_dtype=torch.float,
num_layers=28,
position_encoding_2d=True,
empty_init=True
):
super(GLMBlock, self).__init__()
# Set output layer initialization if not provided.
self.layer_id = layer_id
# LayerNorm层
self.input_layernorm = layernorm(hidden_size, eps=layernorm_epsilon)
# 是否使用2维位置编码
self.position_encoding_2d = position_encoding_2d
# 自注意力层
self.attention = SelfAttention(
hidden_size,
num_attention_heads,
layer_id,
hidden_size_per_attention_head=hidden_size_per_attention_head,
bias=use_bias,
params_dtype=params_dtype,
position_encoding_2d=self.position_encoding_2d,
empty_init=empty_init
)
# Post Layer Norm层
self.post_attention_layernorm = layernorm(hidden_size, eps=layernorm_epsilon)
self.num_layers = num_layers
# GLU层
self.mlp = GLU(
hidden_size,
inner_hidden_size=inner_hidden_size,
bias=use_bias,
layer_id=layer_id,
params_dtype=params_dtype,
empty_init=empty_init
)
def forward(
self,
hidden_states: torch.Tensor,
position_ids,
attention_mask: torch.Tensor,
layer_id,
layer_past: Optional[Tuple[torch.Tensor, torch.Tensor]] = None,
use_cache: bool = False,
output_attentions: bool = False,
):
"""
hidden_states: [seq_len, batch, hidden_size]
attention_mask: [(1, 1), seq_len, seq_len]
"""
# 对输入进行Layer Norm
# [seq_len, batch, hidden_size]
attention_input = self.input_layernorm(hidden_states)
# 自注意力
attention_outputs = self.attention(
attention_input,
position_ids,
attention_mask=attention_mask,
layer_id=layer_id,
layer_past=layer_past,
use_cache=use_cache,
output_attentions=output_attentions
)
attention_output = attention_outputs[0]
outputs = attention_outputs[1:]
# 自注意力的输出和输入残差连接
alpha = (2 * self.num_layers) ** 0.5
hidden_states = attention_input * alpha + attention_output
# Layer Norm
mlp_input = self.post_attention_layernorm(hidden_states)
# 全连接层投影
mlp_output = self.mlp(mlp_input)
# MLP层的输出和输入残差连接
output = mlp_input * alpha + mlp_output
if use_cache:
outputs = (output,) + outputs
else:
outputs = (output,) + outputs[1:]
return outputs # hidden_states, present, attentions
六、ChatGLMPreTrainedModel
ChatGLMPreTrainedModel是ChatGLMModel和ChatGLMForConditionalGeneration,其提供获取注意力mask和position ids。
1. Mask
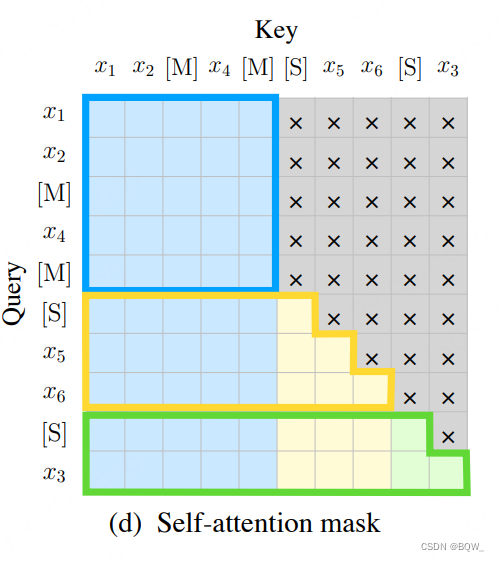
ChatGLM-6B使用的Mask仍然是prefix-LM的Mask,其对于输入的前缀使用双向注意力,对于后续的生成部分则是Causal Mask。下面是ChatGLMPreTrainedModel中的get_masks函数实现:
def get_masks(self, input_ids, device):
batch_size, seq_length = input_ids.shape
# context_lengths记录了batch中每个样本的真实长度
context_lengths = [seq.tolist().index(self.config.bos_token_id) for seq in input_ids]
# 生成causal mask,即下三角以及对角线为1,上三角为0
attention_mask = torch.ones((batch_size, seq_length, seq_length), device=device)
attention_mask.tril_()
# 将前缀部分的注意力改为双向
for i, context_length in enumerate(context_lengths):
attention_mask[i, :, :context_length] = 1
attention_mask.unsqueeze_(1)
attention_mask = (attention_mask < 0.5).bool()
return attention_mask
2. Position_ids
在介绍注意力层的时候,已经介绍过2维的postion_ids了。代码实现中,position_ids就是GLM论文中的Position 1,block_position_ids则是论文中的Position 2。
def get_position_ids(self, input_ids, mask_positions, device, use_gmasks=None):
"""
input_ids: [batch_size, seq_length]
mask_positions: [batch_size],由于GLM系列中会使用[Mask]或[gMask]标志,mask_positions就是指这些标注的具体位置
"""
batch_size, seq_length = input_ids.shape
if use_gmasks is None:
use_gmasks = [False] * batch_size
# context_lengths:未被padding前,batch中各个样本的长度
context_lengths = [seq.tolist().index(self.config.bos_token_id) for seq in input_ids]
# 2维位置编码
if self.position_encoding_2d:
# [0,1,2,...,seq_length-1]
position_ids = torch.arange(seq_length, dtype=torch.long, device=device).unsqueeze(0).repeat(batch_size, 1)
# 将原始输入后所有位置的postion id都设置为[Mask]或者[gMask]的位置id
# (该操作见注意力层对位置编码的介绍)
for i, context_length in enumerate(context_lengths):
position_ids[i, context_length:] = mask_positions[i]
# 原始输入的位置编码全部设置为0,待生成的位置添加顺序的位置id
# 例如:[0,0,0,0,1,2,3,4,5]
block_position_ids = [torch.cat((
torch.zeros(context_length, dtype=torch.long, device=device),
torch.arange(seq_length - context_length, dtype=torch.long, device=device) + 1
)) for context_length in context_lengths]
block_position_ids = torch.stack(block_position_ids, dim=0)
# 将postion_ids和block_position_ids堆叠在一起,用于后续的参数传入;
# 在注意力层中,还有将这个position_ids拆分为两部分
position_ids = torch.stack((position_ids, block_position_ids), dim=1)
else:
position_ids = torch.arange(seq_length, dtype=torch.long, device=device).unsqueeze(0).repeat(batch_size, 1)
for i, context_length in enumerate(context_lengths):
if not use_gmasks[i]:
position_ids[i, context_length:] = mask_positions[i]
return position_ids
七、ChatGLMModel
ChatGLMModel基本就是通过上面介绍的各个组件构造最终的模型。原理没什么可介绍了,直接来看代码。下面的代码会将不易于理解模型结构的部分删除掉,因此与原始版本略有不同。
class ChatGLMModel(ChatGLMPreTrainedModel):
def __init__(self, config: ChatGLMConfig, empty_init=True):
super().__init__(config)
if empty_init:
init_method = skip_init
else:
init_method = default_init
# 保存各类参数
self.max_sequence_length = config.max_sequence_length
self.hidden_size = config.hidden_size
self.params_dtype = torch.half
self.num_attention_heads = config.num_attention_heads
self.vocab_size = config.vocab_size
self.num_layers = config.num_layers
self.layernorm_epsilon = config.layernorm_epsilon
self.inner_hidden_size = config.inner_hidden_size
self.hidden_size_per_attention_head = self.hidden_size // self.num_attention_heads
self.position_encoding_2d = config.position_encoding_2d
self.pre_seq_len = config.pre_seq_len
self.prefix_projection = config.prefix_projection
# 初始化embedding层
self.word_embeddings = init_method(
torch.nn.Embedding,
num_embeddings=self.vocab_size, embedding_dim=self.hidden_size,
dtype=self.params_dtype
)
self.gradient_checkpointing = False
def get_layer(layer_id):
return GLMBlock(
self.hidden_size,
self.num_attention_heads,
self.layernorm_epsilon,
layer_id,
inner_hidden_size=self.inner_hidden_size,
hidden_size_per_attention_head=self.hidden_size_per_attention_head,
layernorm=LayerNorm,
use_bias=True,
params_dtype=self.params_dtype,
position_encoding_2d=self.position_encoding_2d,
empty_init=empty_init
)
# 堆叠GLMBlock
self.layers = torch.nn.ModuleList(
[get_layer(layer_id) for layer_id in range(self.num_layers)]
)
# 最后的Layer Norm层
self.final_layernorm = LayerNorm(self.hidden_size, eps=self.layernorm_epsilon)
def get_input_embeddings(self):
return self.word_embeddings
def set_input_embeddings(self, new_embeddings: torch.Tensor):
self.word_embeddings = new_embeddings
@add_start_docstrings_to_model_forward(CHATGLM_6B_INPUTS_DOCSTRING.format("batch_size, sequence_length"))
@add_code_sample_docstrings(
checkpoint=_CHECKPOINT_FOR_DOC,
output_type=BaseModelOutputWithPastAndCrossAttentions,
config_class=_CONFIG_FOR_DOC,
)
def forward(
self,
input_ids: Optional[torch.LongTensor] = None,
position_ids: Optional[torch.LongTensor] = None,
attention_mask: Optional[torch.Tensor] = None,
past_key_values: Optional[Tuple[Tuple[torch.Tensor, torch.Tensor], ...]] = None,
inputs_embeds: Optional[torch.LongTensor] = None,
use_cache: Optional[bool] = None,
output_attentions: Optional[bool] = None,
output_hidden_states: Optional[bool] = None,
return_dict: Optional[bool] = None,
) -> Union[Tuple[torch.Tensor, ...], BaseModelOutputWithPast]:
### (开始)一些输入输入和参数设置,可以忽略
output_attentions = output_attentions if output_attentions is not None else self.config.output_attentions
output_hidden_states = (
output_hidden_states if output_hidden_states is not None else self.config.output_hidden_states
)
use_cache = use_cache if use_cache is not None else self.config.use_cache
return_dict = return_dict if return_dict is not None else self.config.use_return_dict
if self.gradient_checkpointing and self.training:
if use_cache:
logger.warning_once(
"`use_cache=True` is incompatible with gradient checkpointing. Setting `use_cache=False`..."
)
use_cache = False
if input_ids is not None and inputs_embeds is not None:
raise ValueError("You cannot specify both input_ids and inputs_embeds at the same time")
elif input_ids is not None:
batch_size, seq_length = input_ids.shape[:2]
elif inputs_embeds is not None:
batch_size, seq_length = inputs_embeds.shape[:2]
else:
raise ValueError("You have to specify either input_ids or inputs_embeds")
### (结束)一些输入输出和参数设置,可以忽略
# embedding层
if inputs_embeds is None:
inputs_embeds = self.word_embeddings(input_ids)
if past_key_values is None:
past_key_values = tuple([None] * len(self.layers))
# 获得注意力mask,该功能继承自ChatGLMPreTrainedModel
if attention_mask is None:
attention_mask = self.get_masks(
input_ids,
device=input_ids.device
)
if position_ids is None:
MASK, gMASK = self.config.mask_token_id, self.config.gmask_token_id
seqs = input_ids.tolist()
# 记录input_ids中是否使用了mask以及mask的位置
# mask_positions记录每个样本中mask的位置
# use_gmasks记录是否使用了gMask
mask_positions, use_gmasks = [], []
for seq in seqs:
mask_token = gMASK if gMASK in seq else MASK
use_gmask = mask_token == gMASK
mask_positions.append(seq.index(mask_token))
use_gmasks.append(use_gmask)
# 获得position_ids,该功能继承自ChatGLMPreTrainedModel
position_ids = self.get_position_ids(
input_ids,
mask_positions=mask_positions,
device=input_ids.device,
use_gmasks=use_gmasks
)
# [seq_len, batch, hidden_size]
hidden_states = inputs_embeds.transpose(0, 1)
presents = () if use_cache else None
all_self_attentions = () if output_attentions else None
all_hidden_states = () if output_hidden_states else None
if attention_mask is None:
attention_mask = torch.zeros(1, 1, device=input_ids.device).bool()
else:
attention_mask = attention_mask.to(hidden_states.device)
# 模型的前向传播
for i, layer in enumerate(self.layers):
if output_hidden_states:
all_hidden_states = all_hidden_states + (hidden_states,)
layer_past = past_key_values[i]
if self.gradient_checkpointing and self.training:
layer_ret = torch.utils.checkpoint.checkpoint(
layer,
hidden_states,
position_ids,
attention_mask,
torch.tensor(i),
layer_past,
use_cache,
output_attentions
)
else:
layer_ret = layer(
hidden_states,
position_ids=position_ids,
attention_mask=attention_mask,
layer_id=torch.tensor(i),
layer_past=layer_past,
use_cache=use_cache,
output_attentions=output_attentions
)
hidden_states = layer_ret[0]
if use_cache:
presents = presents + (layer_ret[1],)
if output_attentions:
all_self_attentions = all_self_attentions + (layer_ret[2 if use_cache else 1],)
# 最终的Layer Norm
hidden_states = self.final_layernorm(hidden_states)
if output_hidden_states:
all_hidden_states = all_hidden_states + (hidden_states,)
if not return_dict:
return tuple(v for v in [hidden_states, presents, all_hidden_states, all_self_attentions] if v is not None)
return BaseModelOutputWithPast(
last_hidden_state=hidden_states,
past_key_values=presents,
hidden_states=all_hidden_states,
attentions=all_self_attentions,
)