Linux-0.11 kernel目录进程管理system_call.s详解
模块简介
本节主要介绍了在Linux-0.11中关于系统调用的相关实现。Linux-0.11使用int 0x80中断以及eax寄存器中存储的功能号去调用内核中所提供的功能,在系统调用发生的过程中伴随着用户态向内核态的主动切换。
需要注意的时,用户通常并不是直接使用系统调用的中断,而是libc中所提供的接口函数实现。
过程分析
system_call
当0x80号中断发生的时候,CPU除了切入内核态之外,还会自动完成下列几件事:
1.找到当前进程的内核栈, 通过tss中的esp0 ss0定位
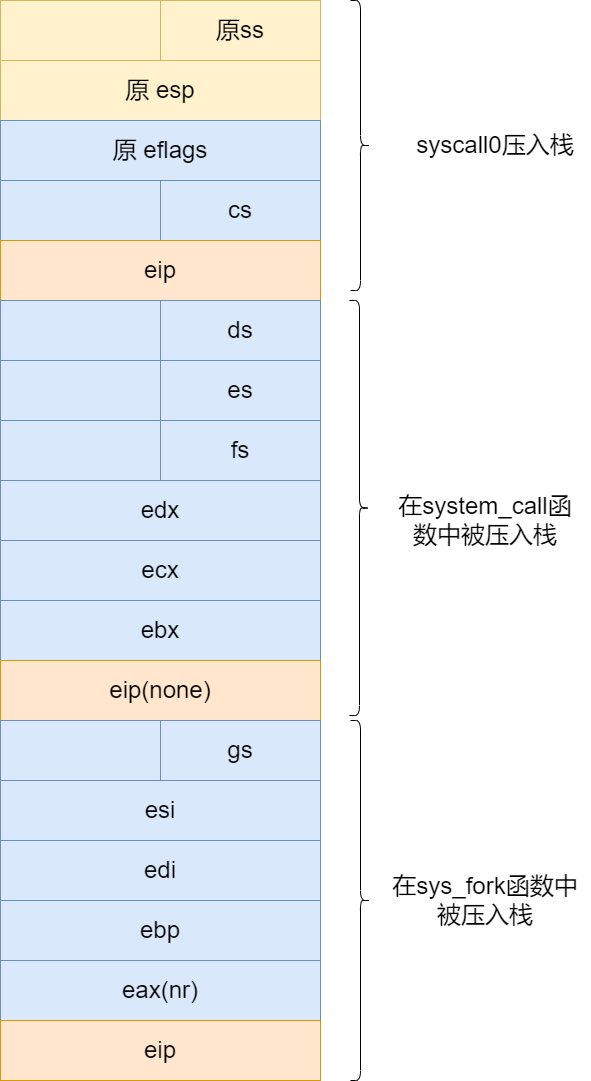
2.在内核栈中依次压入用户态的寄存器SS、ESP、EFLAGS、CS、EIP
当内核从系统调用中返回的时候,需要调用"iret"指令来返回用户态,显然iret代表的是内核栈中一系列的寄存器SS、ESP、EFLAGS、CS、EIP弹出操作。
在system_call中会将DS、ES、FS、EDX、ECX、EBX入栈。
在调用sys_call函数时,会将系统调用号传给eax, 因此首先判断eax是否超过了最大的系统调用号。
cmpl $nr_system_calls-1,%eax
ja bad_sys_call
接下来将一些寄存器压栈
push %ds
push %es
push %fs
pushl %edx
pushl %ecx # push %ebx,%ecx,%edx as parameters
pushl %ebx # to the system call
将es和ds指向了内核的数据段, 将fs指向了用户的数据段。
0x10 = |0 0 0 0 0 0 0 0 0 0 0 1 0| 0 | 0 0|
段选择子 = 2
TI = 0
RPL = 0
0x17 = |0 0 0 0 0 0 0 0 0 0 0 1 0| 1 | 1 1|
段选择子 = 2
TI = 1
RPL = 3
movl $0x10,%edx # set up ds,es to kernel space
mov %dx,%ds
mov %dx,%es
movl $0x17,%edx # fs points to local data space
mov %dx,%fs
下面根据系统调用号去找到对应的调用函数。
call *sys_call_table(,%eax,4)
在AT&T的标准中,_array(,%eax,4)所代表的地址是[_sys_call_table + %eax * 4],即功能号所对应的内核系统调用函数的地址。
sys_call_table在sys.h中定义
fn_ptr sys_call_table[] = { sys_setup, sys_exit, sys_fork, sys_read,
sys_write, sys_open, sys_close, sys_waitpid, sys_creat, sys_link,
sys_unlink, sys_execve, sys_chdir, sys_time, sys_mknod, sys_chmod,
sys_chown, sys_break, sys_stat, sys_lseek, sys_getpid, sys_mount,
sys_umount, sys_setuid, sys_getuid, sys_stime, sys_ptrace, sys_alarm,
sys_fstat, sys_pause, sys_utime, sys_stty, sys_gtty, sys_access,
sys_nice, sys_ftime, sys_sync, sys_kill, sys_rename, sys_mkdir,
sys_rmdir, sys_dup, sys_pipe, sys_times, sys_prof, sys_brk, sys_setgid,
sys_getgid, sys_signal, sys_geteuid, sys_getegid, sys_acct, sys_phys,
sys_lock, sys_ioctl, sys_fcntl, sys_mpx, sys_setpgid, sys_ulimit,
sys_uname, sys_umask, sys_chroot, sys_ustat, sys_dup2, sys_getppid,
sys_getpgrp, sys_setsid, sys_sigaction, sys_sgetmask, sys_ssetmask,
sys_setreuid,sys_setregid, sys_iam, sys_whoami };
找到系统调用号之后,call命令就将转到相应的地址执行。
当系统调用执行完毕之后,下面判断进程的状态:
movl current,%eax
cmpl $0,state(%eax) # state
jne reschedule
cmpl $0,counter(%eax) # counter
je reschedule
如果进程状态是ok的,也就意味着程序可以继续运行而不必被挂起, 那么就开始执行ret_from_sys_call。
ret_from_sys_call
当系统调用执行完毕之后,会执行ret_from_sys_call的代码,从而返回用户态。
在系统调用返回之前,这里还要做的一件事情就是处理进程收到的信号。寄存器中存储的是当前运行的进程current的pcb的地址。这里可以回顾一下pcb的结构,signal的偏移量是16,而blocked的偏移量是33*16。
struct task_struct {
/* these are hardcoded - don't touch */
long state; /* -1 unrunnable, 0 runnable, >0 stopped */
long counter;
long priority;
long signal;
struct sigaction sigaction[32];
long blocked;
/*....*/
因此这里定义了两个常量singal=16,blocked=33*16,通过这样的操作将signal的内容存到ebx寄存器中,将blocked的内容存到ecx寄存器中。然后将blocked信号取反和进程收到的信号做与运算(!block & signal),就可以得到进程收到的有效的信号。
movl signal(%eax),%ebx
movl blocked(%eax),%ecx
notl %ecx
andl %ebx,%ecx
bsfl %ecx,%ecx
je 3f
btrl %ecx,%ebx
movl %ebx,signal(%eax)
incl %ecx
pushl %ecx
call do_signal
在信号处理完毕之后,就是将sys_call压入栈中的寄存器出栈,最后调用iret返回用户态执行的位置。
3: popl %eax
popl %ebx
popl %ecx
popl %edx
pop %fs
pop %es
pop %ds
iret
sys_fork
在sys_fork中将调用copy_process完成最后的进程fork的过程,下面是sys_fork的编码,其是一段汇编代码,这是少数用汇编写的sys_开头的函数,大多数sys_开头的内核方法都是c语言编写的。
sys_fork:
call find_empty_process
testl %eax,%eax
js 1f
push %gs
pushl %esi
pushl %edi
pushl %ebp
pushl %eax
call copy_process
addl $20,%esp
1: ret
sys_fork首先调用find_empty_process去进程task_struct数组中寻找一个空位,如果寻找不到就直接返回。如果寻找到了,就将一些寄存器压栈,进而调用copy_process方法。在调用sys_fork方法时,内核栈的状态如下所示: