聚类算法学习笔记(一)
- 方法
- 实验对比
- 其他概念
- Cluster Tolerance
- KD-Tree
- Refercence
方法
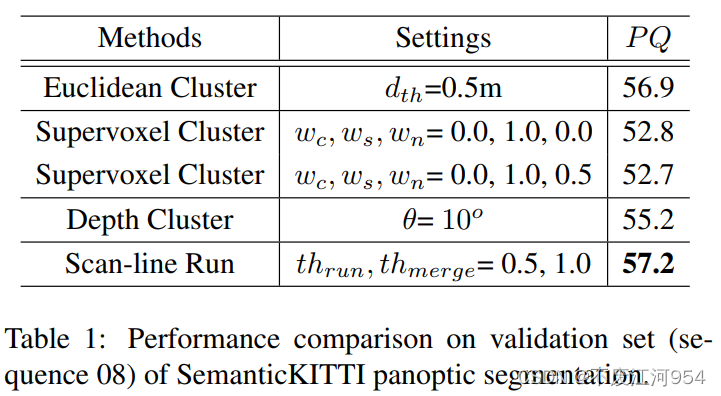
Euclidean Cluster [ 1 ] ^{[1]} [1]

SuperVoxel [ 1 ] ^{[1]} [1]

Depth Cluster [ 1 ] ^{[1]} [1]

SLR: Scan-line Run [ 1 ] ^{[1]} [1]

Range Image-based [ 2 ] ^{[2]} [2]
其实就是DepthCluster

实验对比
其他概念
Cluster Tolerance
拓扑容限(又叫做拓扑容差、聚会容限),决定多大范围内要素能够被捕捉在一起。当两个相邻近点的xyz距离小于给定的阈值时,两个点会聚合成为一个点,共享同一坐标。其单位为m。其作用对象为xyz坐标,当xyz任一坐标,比如说两点的x坐标之间的差值小于阈值时,两点就会融合成为一点。
KD-Tree
Refercence
[1] A Technical Survey and Evaluation of Traditional Point Cloud Clustering Methods for LiDAR Panoptic Segmentation
[2] Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation
[3] 拓扑分析的专有名词
[4] 关于ArcGIS中拓扑的理解