编号:25
基于STM32倒车雷达系统(OLED显示)
功能描述:
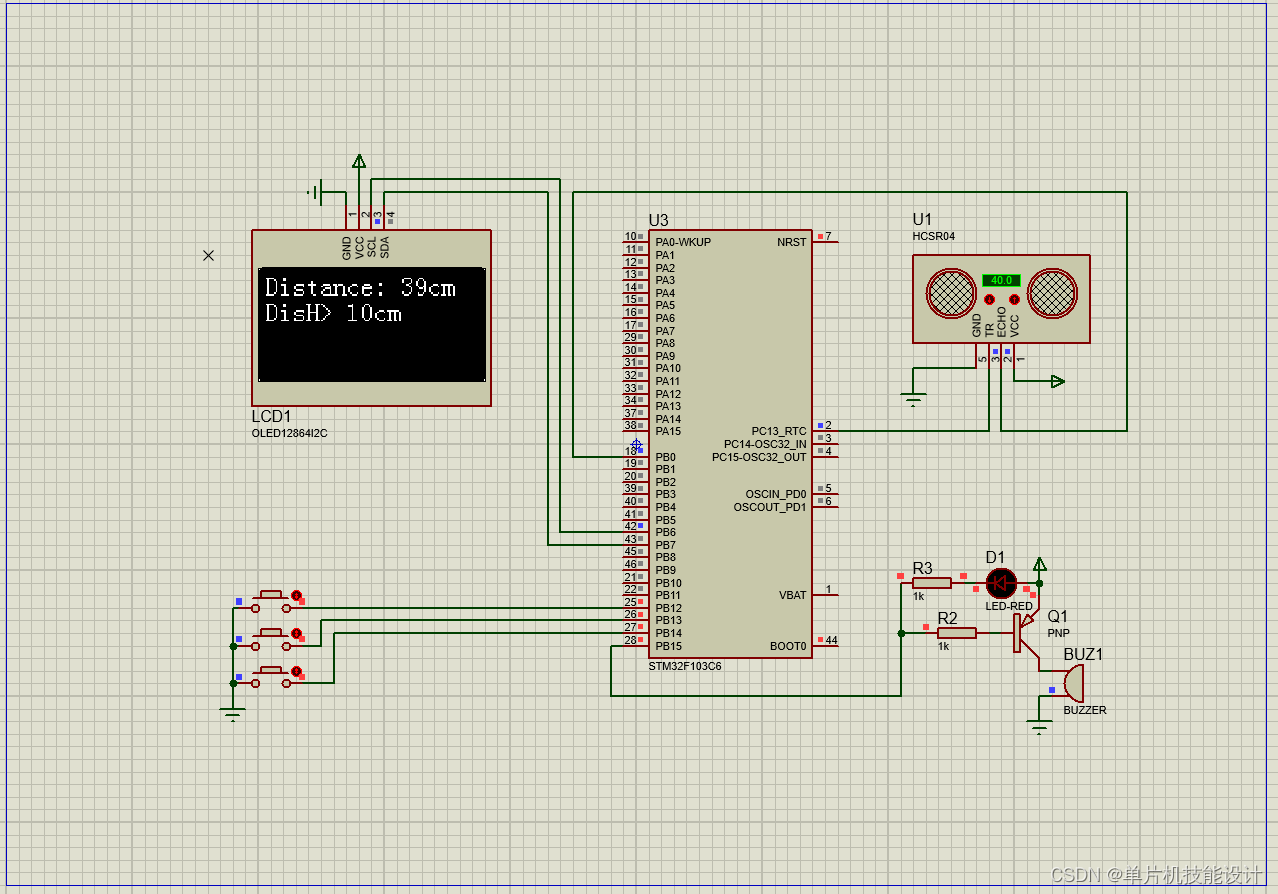
本设计由STM32单片机+HC_SR04超声波模块+OLED+按键+蜂鸣器LED组成。
1、采用STM32F103最小系统。
2、HC_SR04超声波模块实现测距。测距范围2cm-400cm之间。
3、OLED实时显示测到的距离。
4、三个按键可实现上限报警值设定,按键分别为设置键、设置加、设置减。
5、当测得距离小于上限值时,声光报警。
PROTEUS 8.11版本才可使用
视频演示链接:
25、基于STM32倒车雷达系统(OLED显示)
仿真图:
程序源码:
/***********************************************
***********************************************/
#include "delay.h"
#include "key.h"
#include "led.h"
#include "timer.h"
#include "OLED_I2C.h"
#include "HCSR04.h"
#include "stdio.h"
#include "stdlib.h"
short Dis_up = 10; //距离上限 默认100cm
extern u32 cnt ;
int main(void)
{
unsigned int distance = 0; //距离
unsigned char buf[18];
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
LED_Init();
OLED_Init(); //OLED初始化操作
OLED_CLS(); //OLED清除屏幕
TIM3_Int_Init(499,7199); //10Khz的计数频率,计数到500为50ms
HCSR04_Init(); //以1Mhz的频率计数
KEY_Init(); //初始化端口
sprintf((char *)buf,"DisH:%3dcm",Dis_up);
OLED_ShowStr(16*0,2,buf,2);
while(1)
{
if(flag_timer==1) //200毫秒赋一次值 flag_timer是标志位
{
flag_timer = 0; //清除标志 等待下一次600ms
if(HCSR04_Count(&distance)==0) //测距 将距离值传递给distance
{
sprintf((char *)buf,(const char *)"Distance:%3dcm",distance);
OLED_ShowStr(16*0,0,buf,2);
if(distance<Dis_up) //当前距离小于上限
{
flag_beep = 1; //开报警标志 执行报警程序在定时器中断
}
else
{
flag_beep = 0; //关报警标志位
}
}
else
{
flag_beep = 0; //关报警标志位
sprintf((char *)buf,(const char *)"Distance:---cm");
OLED_ShowStr(16*0,0,buf,2);
}
}
KEY_Set();
}
}
软件免费下载地址:
1、Proteus仿真软件
文件内容:Proteus7.8安装包、Proteus8.6安装包、Proteus.8.10安装包、Proteus Professional 8.11 SP0安装包
链接:https://pan.baidu.com/s/11LNUZ9BJXWvXf1C4dPc3_w
提取码:2756
3、KEIL5 MDK软件(STM32开发软件)
链接:https://pan.baidu.com/s/1t3eY-3yRdTa7jZMlijq_jg
提取码:ab58
文件下载:
https://pan.baidu.com/s/1y8OVPOgM5xIPbvQ9e-w3VA?pwd=xn4x







![[附源码]Python计算机毕业设计Django家庭整理服务管理系统](https://img-blog.csdnimg.cn/c66b808f47984b6193b3bea1d69721f7.png)
![[附源码]计算机毕业设计医院挂号住院管理系统Springboot程序](https://img-blog.csdnimg.cn/52b03fd38b2346f3ac3690b1c25eb800.png)