https://github.com/MichaelFYang/far_planner
https://www.cmu-exploration.com/
系统结构

- Far Planner 属于
High-level planning module,进行全局规划,找到可行路径; - 将
way_point发布给Local planner和path following
KeyPoint
Local-layer
- 当前帧点云 ➡️ edge points ➡️ enclosed polygons ➡️ visibility graph
- 动态障碍物
- 将被遮挡的 visibility edges 删除;
- 动态障碍物消失后,重新连接;
- 点云提取多边形
- 将点云映射到图像(鸟瞰图)上,黑色-可通行,白色-障碍物
- 白色像素使用机器人尺寸进行膨胀,均值滤波平滑
- OpenCV 拓扑边缘点提取,输出 enclosed polygons :Topological structural analysis of digitized binary images by border following
- 封闭多边形顶点稀疏化:Algorithms for the reduction of the number of points required to represent a digitized line or its caricature
- 顶点间内角用于量化障碍物曲率,内角太小的抛掉

- 将点云映射到图像(鸟瞰图)上,黑色-可通行,白色-障碍物
Global-layer
- 和 Local-layer 匹配,获得增量式更新
- Local-layer 构建
- 之前得到了封闭多边形,对 Edge 超过阈值的进行可视角度筛选;Edge 太短的角度噪声太大,没法选;
- Local-Global 关联
- 遍历 vertex,若两地图间的 vertex 位置重叠,则将其关联;
- 关联后,更新 Global 中 vertex 的位置;Modern Methods for Robust Regression
- 在 vertex 对应历史帧位置中挑选 inlier,然后对 inlier 求均值
- Global 中长期未被关联的 vertex 根据投票删除
- Local 中未被关联的 vertex 直接添加到 Global
- Edge 更新
- 若 Global 两点之间存在 Edge,则更新
- 若不存在,则新增
- 可视图更新
- Talk 图
- Local-layer 构建


Planning on V-Graph
- 在 Global-Layer 中添加 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Rsy5uQxf-1684922016766)(null#card=math&code=P_{robot}&id=ID5nJ)]和 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dlYkMZ9t-1684922016693)(null#card=math&code=P_{goal}&id=Q9KPL)] 两个 vertex,并根据可视性连接 Edge;
- 在 Global-Layer 中使用宽度优先搜索,找
robot到goal的可行最短路径- 与 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-okJ8FdWV-1684922016708)(null#card=math&code=P_{robot}&id=zpeCD)]能构成可视 Edge 的 vertex 构成
free space- 沿途所有
robot能看到的 vertex 均组成free space
- 沿途所有
- 其余 Global vertex 构成
unknown space【未探索区域】
- 与 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-okJ8FdWV-1684922016708)(null#card=math&code=P_{robot}&id=zpeCD)]能构成可视 Edge 的 vertex 构成
- 保存 V-Graph
- 将带有
free space标识的 V-Graph 保存 - 再次加载时,可选择是否
- attemptable planning: 在
free space+unknown space中导航 - non-attemptable planning:仅在
free space中导航 
- attemptable planning: 在
- 将带有
Multi-layer
- 用于飞行器场景,在 3D 空间中建立多个水平切片,并在每层切片构建多边形,跨层构建 3D 可见性;

Terrain traversability analysis module
- 分割障碍物(obs)、地面(free)
Modules
外围模块

FARMaster
ContourDetector contour_detector_; // 轮廓检测 - 处理当前帧点云
DynamicGraph graph_manager_; // 全局图 nav_graph_
GraphPlanner graph_planner_; // 可视图上的 Planning 模块
ContourGraph contour_graph_; // 基于轮廓构造的局部图,并与全局图匹配
主要线程
- PlanningCallBack()
- 定时器线程,约 2.5 Hz
- 在接收 Goal 任务之后,周期性执行可视图路径规划
- Loop()
- ROS 定时线程,2.5 Hz
- 主要用于 V-Graph 的维护
- NavNode
is_odom表示机器人当前位姿插入图中的 Node- 会随机器人位姿移动,属于 free node
- 每次更新均为重新初始化
is_navpoint表示局部导航点,可探测范围内的一个临时目标点- 属于 free node
is_active表示与机器人很近的点、或邻近点【有点像 frontier】- is_nearby,距离小于车身直径
- 在 odom_node 的邻近点(connect_nodes)栈内
- 当前点的邻近点都是 is_active
is_contour_match是轮廓上的点
DynamicGraph::UpdateNavGraph
near_nav_graph_->extend_match_nodes_包含 边界点 和active点new_nodes_当前帧检测到的 vertex,且没有 Global 匹配项;
GraphPlanner::UpdateGraphTraverability 生成两套代价地图
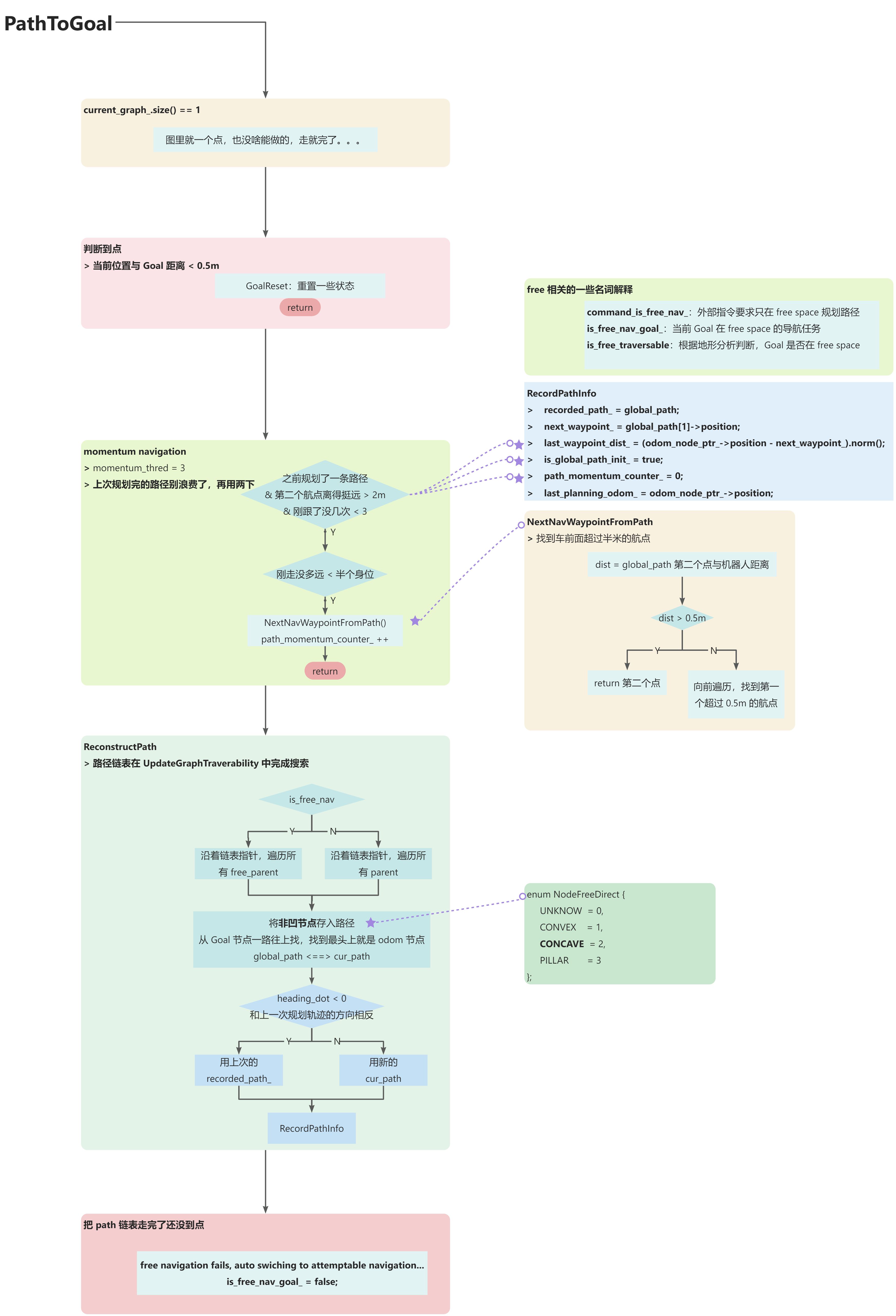
GraphPlanner::PathToGoal
Refs
- 轮廓检测算法
- Simplify Polylines with the Douglas Peucker Algorithm
- far_planner 源码阅读笔记
- 机器人自主导航从零开始第六步——FAR Planner全局路径规划算法
- https://www.cmu-exploration.com/development-environment