PID控制逻辑基本介绍
- 1. 源由
- 2. PID基本框图
- 3. PID公式变换
- 4. PID参数释义
- 4.1 比例因子Kp
- 4.2 比例积分Ki
- 4.3 比例微分Kd
- 4.4 Kp/Ki关系
- 4.5 Kp/Kd关系
- 5. 总结
- 6. 附录
- 6.1 了解 PID 控制,第 1 部分:什么是 PID 控制?
- 6.2 Anti-windup for PID control Understanding PID Control- Part 2
- 6.3 Noise Filtering in PID Control Understanding PID Control- Part 3
- 6.4 A PID Tuning Guide Understanding PID Control- Part 4
- 6.5 Build a Model for Control System Design | Understanding PID Control, Part 5
- 6.6 Manual and Automatic PID Tuning Methods Understanding PID Control- Part 6
- 6.7 Important PID Concepts Understanding PID Control- Part 7
1. 源由
飞控上有9DOF(Degree Of Freedom):
- 磁力计方向(degree/gauss)
- 加速度方向(g)
- 角速度方向(degree per second)
遥控器上对应的控制:
- 姿态控制:Pitch/Roll/Yaw
角速度:Pitch/Roll/Yaw
磁力计:机头水平面投影指向方向
注1:角速度是通过扭力来触发
- 油门控制:Throttle
加速度:(推力 + 重力 + 阻力) 矢量和
注2:推理矢量方向取决于飞控姿态
而上述遥控可以认为是输入,其整个逻辑过程如下:
遥控RC setpoint ==》 error ==》 飞控(PID)控制 ==》 动力模块(process)处理 ==》 物理output
注3:setpoint - output = error,这就是PID控制一个回路。
PID(Proportion Integration Differentiation比例-积分-微分)控制规律作为经典控制理论的最大成果之一,由于其原理简单且易于实现,具有一定的自适应性和鲁棒性,在目前的工业过程控制中仍被广泛采用,飞控算法中亦是如此。
为了更好的理解飞控控制行为,对PID的理解将可以深化飞控姿态调整逻辑。所以,本章将对PID基本控制逻辑做一个简单的介绍。
2. PID基本框图
该模型出现于20世纪40年代,目前世界上可能有高达95%的控制模型都是采用类似模型,比如:PI/PD/PID等。
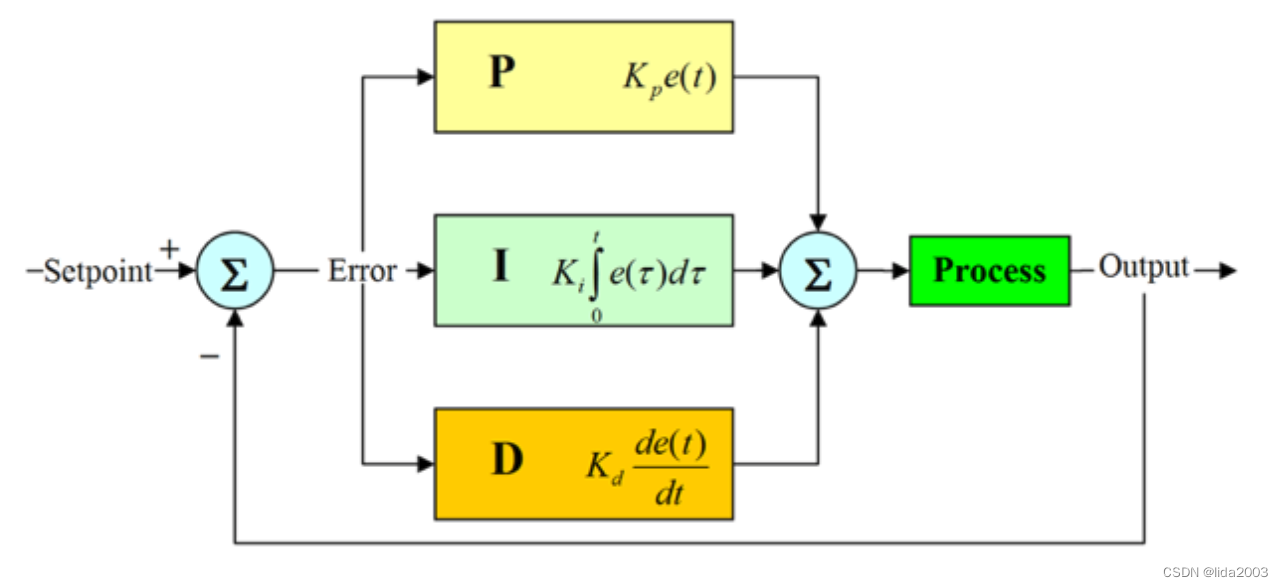
其对应教科书上的经典理论公式:
其中:
- y:measurable process variable
- ysp:setpoint
- e = ysp - y:control error
- K:proportional gain
- Ti:integral time
- Td:derivative time
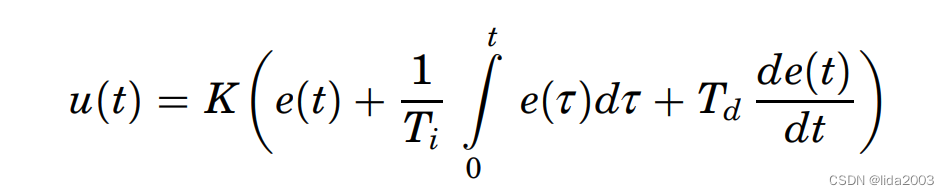
3. PID公式变换
上面表达式经过变换以后可以得到:
u
(
t
)
=
K
⋅
e
(
t
)
+
K
T
i
∫
0
t
e
(
τ
)
d
τ
+
K
⋅
T
d
d
e
(
t
)
d
t
u(t)=K \cdot e(t) + \cfrac{K}{T_i}\int_{0}^{t} e(\tau) d\tau + K \cdot T_d \cfrac{de(t)}{dt}
u(t)=K⋅e(t)+TiK∫0te(τ)dτ+K⋅Tddtde(t)
=
K
⋅
e
(
t
)
+
K
i
∫
0
t
e
(
τ
)
d
τ
+
K
d
d
e
(
t
)
d
t
= K \cdot e(t) + K_i \int_{0}^{t} e(\tau) d\tau +K_d \cfrac{de(t)}{dt}
=K⋅e(t)+Ki∫0te(τ)dτ+Kddtde(t)
得到最终Kp,Ki,Kd参数如下:
K
p
=
K
K_p=K
Kp=K
K i = K T i K_i=\cfrac{K}{T_i} Ki=TiK
K d = K ⋅ T d K_d=K \cdot T_d Kd=K⋅Td
4. PID参数释义
假设:表达式不存疑的情况下,可以看出Kp,Ki,Kd之间是有关联关系的。
因此,首先不纠结Kp,Ki,Kd之间的关联关系,单独分析;然后在从关联关系去讨论。
4.1 比例因子Kp
Kp是修正误差的比例因子,时间作用于在于一次反馈回路的时间。
- 误差越大,相应的修正值也越大;
- 当比例因子越大,该修正项贡献越大;
- 作用时间取决于一次反馈回路的耗时;
4.2 比例积分Ki
Ki修正的是累计误差,时间作用于起始时间到作用时间。
- 累计误差越大,相应修正值越大;
- 当比例积分越大,该修正项贡献越大;
- 作用时间长期持续(具有记忆效应);
4.3 比例微分Kd
Kd修正的是误差的变化(斜率),时间作用于误差计算时刻。
- 误差变化率越大,相应修正值越大;
- 当比例微分越大,该修正项贡献越大;
- 作用于当下时刻(具有瞬时性);
4.4 Kp/Ki关系
Ki是有一个统计时间的概念,其作用时刻是对该时刻之前的统计时间的一个响应,会出现一种迟滞的问题。
典型场景:
当output被拉回setpoint时,由于error始终在积累,导致在output == setpoint时刻,Ki会将output继续维持推离setpoint。
此时,需要增加integrator windup的方法来进行判断处理。
4.5 Kp/Kd关系
鉴于Kp是瞬时斜率,通常来说稳定系统在修正过程中output变化不会非常大,而常见大斜率往往是一些噪声干扰,进而破坏稳定性。
此时,需要增加对output传感量进行降噪处理。
5. 总结
上述所介绍的都是在一个continous domain(连续域)的PID控制器,当处理简单线性变化的控制逻辑具有非常好的应用。
从定性的角度,可以给出如下表格:
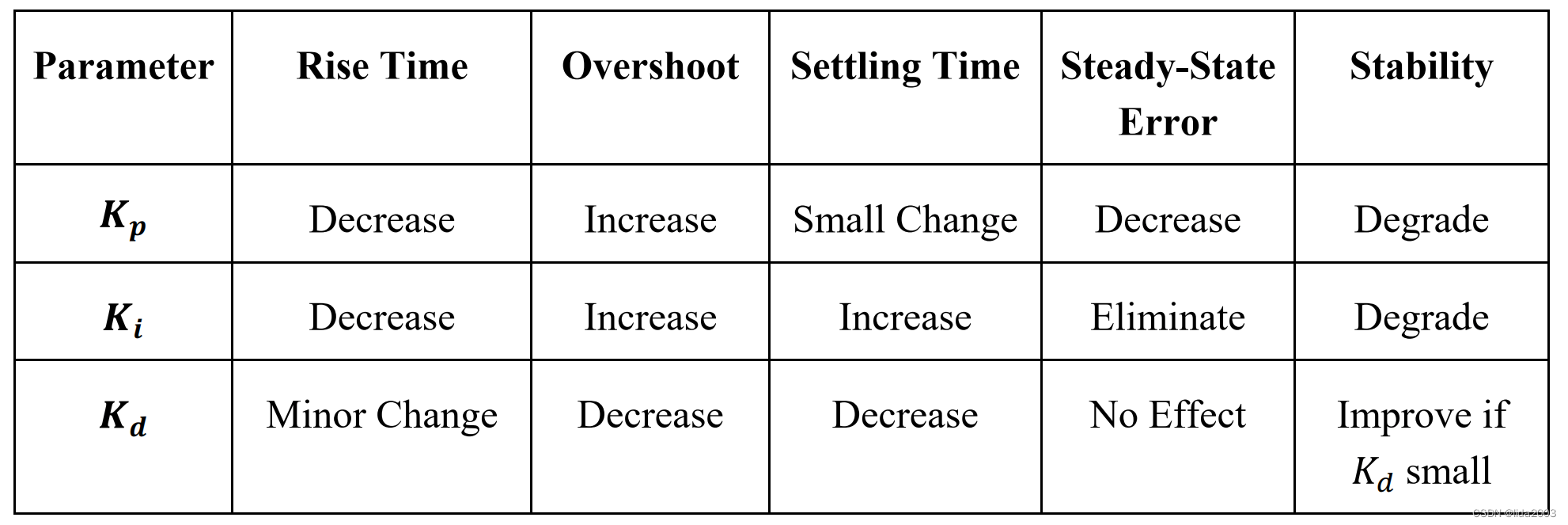
从PID调试方法,简单可以给出如下方法:
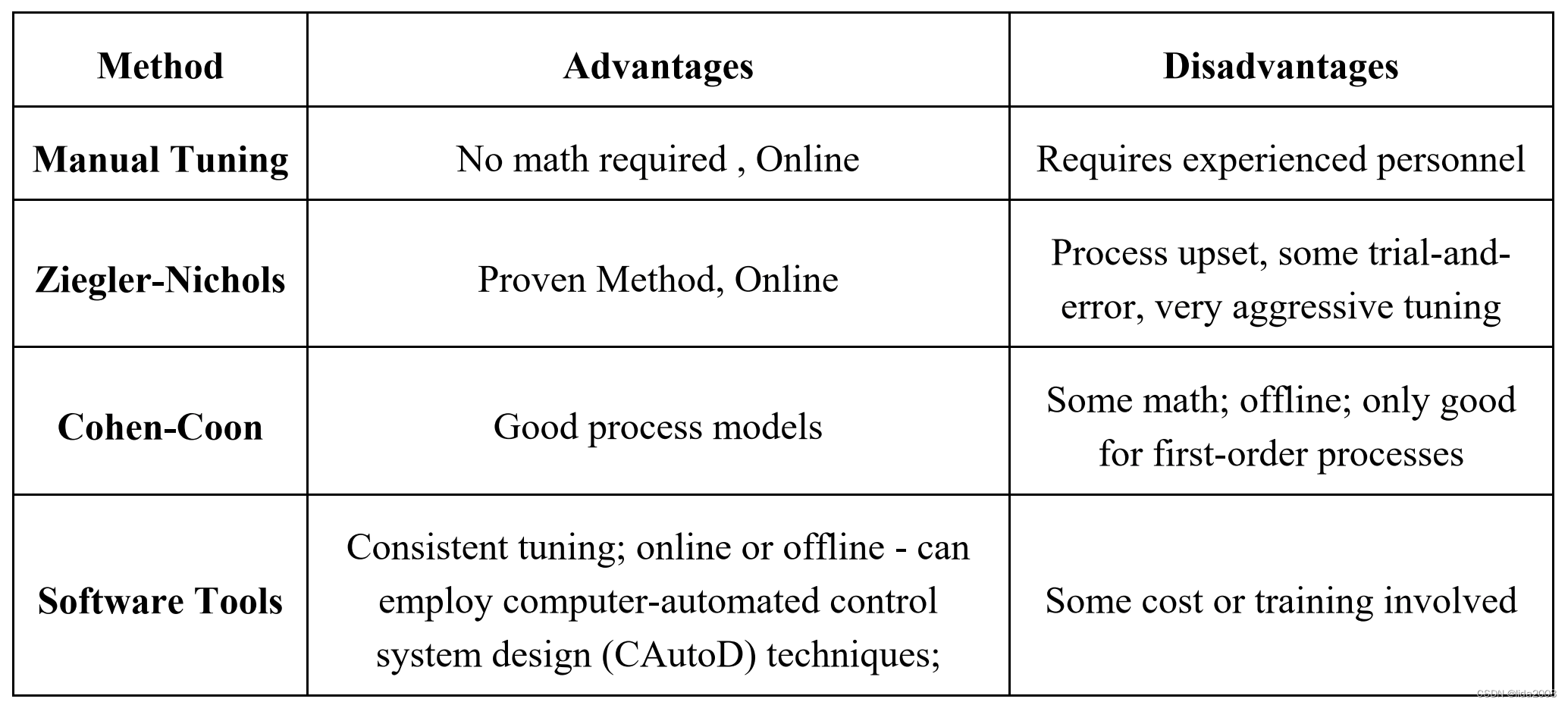
当要针对复杂问题,尤其是discrete domain(分散域)处理问题时,往往需要进行更深入的业务分析,进而采用cascade control/discrete control。
6. 附录
6.1 了解 PID 控制,第 1 部分:什么是 PID 控制?
了解 PID 控制,第 1 部分:什么是 PID 控制?
6.2 Anti-windup for PID control Understanding PID Control- Part 2
Anti-windup for PID control Understanding PID Control- Part 2
6.3 Noise Filtering in PID Control Understanding PID Control- Part 3
Noise Filtering in PID Control Understanding PID Control- Part 3
6.4 A PID Tuning Guide Understanding PID Control- Part 4
A PID Tuning Guide Understanding PID Control- Part 4
6.5 Build a Model for Control System Design | Understanding PID Control, Part 5
Build a Model for Control System Design | Understanding PID Control, Part 5
6.6 Manual and Automatic PID Tuning Methods Understanding PID Control- Part 6
Manual and Automatic PID Tuning Methods Understanding PID Control- Part 6
6.7 Important PID Concepts Understanding PID Control- Part 7
Important PID Concepts Understanding PID Control- Part 7