关于WPT系统建模的一些笔记,在 CSDN 学到很多,现分享给大家,之前有看到过一篇博文, 内容语焉不详,对读者也很不客气,希望这篇博文对大家有用!
Hierarchical multiobjective H-infinity robust control design for wireless power transfer system using genetic algorithm
[!info] Bibliography
[1] M. Yang, Y. Li, H. Du, C. Li, and Z. He, “Hierarchical multiobjective H-infinity robust control design for wireless power transfer system using genetic algorithm,” IEEE Transactions on Control Systems Technology, vol. 27, no. 4, pp. 1753–1761, 2018, doi: 10.1109/TCST.2018.2814589 .
Information
| Key | Value |
|---|---|
| Date | 2018-01 |
| Author | Mingkai Yang, Yanling Li, Hao Du, Chen Li, Zhengyou He |
| Journal | #IEEE-Transactions-on-Control-Systems-Technology |
| DOI | 10.1109/TCST.2018.2814589 |
| Publisher | IEEE Transactions on Control Systems Technology |

System modeling
The states of dynamic components can be approximated by their first-order or zero-order:
i
L
p
=
⟨
i
L
p
⟩
1
e
j
ω
t
+
⟨
i
L
p
⟩
−
1
e
−
j
ω
t
u
C
p
=
⟨
u
C
p
⟩
1
e
j
ω
t
+
⟨
u
C
p
⟩
−
1
e
−
j
ω
t
i
L
s
=
⟨
i
L
s
⟩
1
e
j
ω
t
+
⟨
i
L
s
⟩
−
1
e
−
j
ω
t
u
C
s
=
⟨
u
C
s
⟩
1
e
j
ω
t
+
⟨
u
C
s
⟩
−
1
e
−
j
ω
t
u
C
f
=
⟨
u
C
f
⟩
0
\begin{equation} \begin{aligned} i_{L_p} & =\left\langle i_{L_p}\right\rangle_1 e^{j \omega t}+\left\langle i_{L_p}\right\rangle_{-1} e^{-j \omega t} \\ u_{C_p} & =\left\langle u_{C_p}\right\rangle_1 e^{j \omega t}+\left\langle u_{C_p}\right\rangle_{-1} e^{-j \omega t} \\ i_{L_s} & =\left\langle i_{L_s}\right\rangle_1 e^{j \omega t}+\left\langle i_{L_s}\right\rangle_{-1} e^{-j \omega t} \\ u_{C_s} & =\left\langle u_{C_s}\right\rangle_1 e^{j \omega t}+\left\langle u_{C_s}\right\rangle_{-1} e^{-j \omega t} \\ u_{C_f} & =\left\langle u_{C_f}\right\rangle_0 \end{aligned} \end{equation}
iLpuCpiLsuCsuCf=⟨iLp⟩1ejωt+⟨iLp⟩−1e−jωt=⟨uCp⟩1ejωt+⟨uCp⟩−1e−jωt=⟨iLs⟩1ejωt+⟨iLs⟩−1e−jωt=⟨uCs⟩1ejωt+⟨uCs⟩−1e−jωt=⟨uCf⟩0
- ω = 2 π f \omega = 2\pi f ω=2πf
- ⟨ x ⟩ n = 1 T ∫ 0 T x e − j n ω t d t \langle x \rangle_n = \frac 1T \int_{0}^{T} x e^{-j n \omega t}dt ⟨x⟩n=T1∫0Txe−jnωtdt is the n n nth-order complex Fourier series coefficient.
[!note]
Another form:
i L p = a 1 i L p cos ( ω t ) + b 1 i L p sin ( ω t ) u C p = a 1 u C p cos ( ω t ) + b 1 u C p sin ( ω t ) i L s = a 1 i L s cos ( ω t ) + b 1 i L s sin ( ω t ) u C s = a 1 u C s cos ( ω t ) + b 1 u C s sin ( ω t ) u C f = a 1 u C f cos ( ω t ) + b 1 u C f sin ( ω t ) + a 0 u C f \begin{equation} \begin{aligned} i_{L_p} & = a_{1i_{L_p}} \cos(\omega t) +b_{1i_{L_p}} \sin(\omega t) \\ u_{C_p} & = a_{1u_{C_p}} \cos(\omega t) +b_{1u_{C_p}} \sin(\omega t) \\ i_{L_s} & = a_{1i_{L_s}} \cos(\omega t) +b_{1i_{L_s}} \sin(\omega t) \\ u_{C_s} & = a_{1u_{C_s}} \cos(\omega t) +b_{1u_{C_s}} \sin(\omega t) \\ u_{C_f} & = a_{1u_{C_f}} \cos(\omega t) +b_{1u_{C_f}} \sin(\omega t) + a_{0u_{C_f}}\\ \end{aligned} \end{equation} iLpuCpiLsuCsuCf=a1iLpcos(ωt)+b1iLpsin(ωt)=a1uCpcos(ωt)+b1uCpsin(ωt)=a1iLscos(ωt)+b1iLssin(ωt)=a1uCscos(ωt)+b1uCssin(ωt)=a1uCfcos(ωt)+b1uCfsin(ωt)+a0uCf
where ⟨ x ⟩ 1 = 1 2 ( a 1 x − i b 1 x ) \langle x \rangle_1 = \frac 12(a_{1x} - ib_{1x}) ⟨x⟩1=21(a1x−ib1x)
a n = 2 T ∫ 0 T x ( t ) cos ( t ) d t b n = 2 T ∫ 0 T x ( t ) sin ( t ) d t a 0 = 2 T ∫ t − T t x ( t ) d t \begin{aligned} {a}_n &=\frac{2}{T} \int_0^{T} {x}(t) \cos (t) \mathrm{d}t \\ {b}_n &=\frac{2}{T} \int_0^{T} {x}(t) \sin (t) \mathrm{d}t \\ a_0 &=\frac{2}{{T}} \int_{t-{T}}^t {x}(t) \mathrm{d} t \end{aligned} anbna0=T2∫0Tx(t)cos(t)dt=T2∫0Tx(t)sin(t)dt=T2∫t−Ttx(t)dt

[!note]
{ L p d i L p d t − M d i L s d t + R p i L p − S i U in + u C p = 0 L s d i L s d t + R s i L s + u C s + S r u C f − M d i L p d t = 0 \left\{\begin{aligned} L_p \frac{d i_{L_p}}{d t} - M {\color{red}\frac{d i_{L_s}}{d t}}+ R_p i_{L_p} - S_iU_{\text{in}} + u_{C_p} &= 0\\ L_s {\color{red}\frac{d i_{L_s}}{d t}} + R_si_{L_s}+u_{C_s}+S_ru_{C_f} - M\frac{d i_{L_p}}{dt} &= 0 \end{aligned}\right. ⎩ ⎨ ⎧LpdtdiLp−MdtdiLs+RpiLp−SiUin+uCpLsdtdiLs+RsiLs+uCs+SruCf−MdtdiLp=0=0
Using the second equation:
d i L s d t = 1 L s ( − R s i L s − u C s − S r u C f + M d i L p d t ) {\color{red}\frac{d i_{L_s}}{d t}} = \frac{1}{L_s} \left( -R_si_{L_s} - u_{C_s} - S_ru_{C_f} + M\frac{d i_{L_p}}{dt} \right) dtdiLs=Ls1(−RsiLs−uCs−SruCf+MdtdiLp)
Substituting it to the first equation:
L p d i L p d t − M 1 L s ( − R s i L s − u C s − S r u C f + M d i L p d t ) + R p i L p − S i U in + u C p = 0 L p d i L p d t + M L s R s i L s + M L s u C s + M L s S r u C f − M 2 L s d i L p d t + R p i L p − S i U in + u C p = 0 d i L p d t ( L p − M 2 L s ) + i L s M L s R s + R p i L p + M L s u C s + M L s S r u C f − S i U in + u C p = 0 d i L p d t ( L p L s − M 2 L s ) + i L s M L s R s + R p i L p + M L s u C s + M L s S r u C f − S i U in + u C p = 0 i L s M L s R s + R p i L p + M L s u C s + M L s S r u C f − S i U in + u C p = d i L p d t ( M 2 − L p L s L s ) ( L s M 2 − L p L s ) [ i L s M L s R s + R p i L p + M L s u C s + M L s S r u C f − S i U in + u C p ] = d i L p d t ( 1 M 2 − L p L s ) [ i L s M R s + R p L s i L p + M u C s + M S r u C f − L s S i U in + L s u C p ] = d i L p d t 1 λ [ M R s i L s + R p L s i L p + M u C s + M S r u C f − L s S i U in + L s u C p ] = d i L p d t 1 λ [ R p L s i L p + L s u C p + M R s i L s + M u C s + M S r u C f − L s U in S i ] = d i L p d t \begin{aligned} L_p \frac{di_{L_p}}{dt} - M {\frac{1}{L_s} \left( - R_s i_{L_s} - u_{C_s} - S_r u_{C_f} + M \frac{di_{L_p}}{dt} \right)} + R_p i_{L_p} - S_i U_{\text{in}} + u_{C_p} & = 0\\ L_p \frac{di_{L_p}}{dt} {+ \frac{M}{L_s} R_s i_{L_s} + \frac{M}{L_s} u_{C_s} + \frac{M}{L_s} S_r u_{C_f} - \frac{M^2}{L_s} \frac{di_{L_p}}{dt}} + R_p i_{L_p} - S_i U_{\text{in}} + u_{C_p} & = 0\\ \frac{di_{L_p}}{dt} \left( L_p {- \frac{M^2}{L_s}} \right) {+ i_{L_s} \frac{M}{L_s} R_s} + R_p i_{L_p} {+ \frac{M}{L_s} u_{C_s} + \frac{M}{L_s} S_r u_{C_f}} - S_i U_{\text{in}} + u_{C_p} & = 0\\ \frac{di_{L_p}}{dt} \left( \frac{L_p L_s {- M^2}}{L_s} \right) {+ i_{L_s} \frac{M}{L_s} R_s} + R_p i_{L_p} {+ \frac{M}{L_s} u_{C_s} + \frac{M}{L_s} S_r u_{C_f}} - S_i U_{\text{in}} + u_{C_p} & = 0\\ {i_{L_s} \frac{M}{L_s} R_s} + R_p i_{L_p} {+ \frac{M}{L_s} u_{C_s} + \frac{M}{L_s} S_r u_{C_f}} - S_i U_{\text{in}} + u_{C_p} & = \frac{di_{L_p}}{dt} \left( \frac{{M^2} - L_p L_s {}}{L_s} \right)\\ \left( \frac{L_s}{M^2 - L_p L_s} \right) \left[ i_{L_s} \frac{M}{L_s} R_s + R_p i_{L_p} + \frac{M}{L_s} u_{C_s} + \frac{M}{L_s} S_r u_{C_f} - S_i U_{\text{in}} + u_{C_p} \right] & = \frac{di_{L_p}}{dt}\\ \left( \frac{1}{M^2 - L_p L_s} \right) [i_{L_s} MR_s + R_p L_s i_{L_p} + Mu_{C_s} + MS_r u_{C_f} - L_s S_i U_{\text{in}} + L_s u_{C_p}] & = \frac{di_{L_p}}{dt}\\ \frac1\lambda [MR_s i_{L_s} + R_p L_s i_{L_p} + Mu_{C_s} + MS_r u_{C_f} - L_s S_i U_{\text{in}} + L_s u_{C_p}] & = \frac{di_{L_p}}{dt}\\ \frac1\lambda [R_p L_s i_{L_p} + L_s u_{C_p} + MR_s i_{L_s} + Mu_{C_s} + MS_r u_{C_f} - L_s U_{\text{in}} S_i] & = \frac{di_{L_p}}{dt}\end{aligned} LpdtdiLp−MLs1(−RsiLs−uCs−SruCf+MdtdiLp)+RpiLp−SiUin+uCpLpdtdiLp+LsMRsiLs+LsMuCs+LsMSruCf−LsM2dtdiLp+RpiLp−SiUin+uCpdtdiLp(Lp−LsM2)+iLsLsMRs+RpiLp+LsMuCs+LsMSruCf−SiUin+uCpdtdiLp(LsLpLs−M2)+iLsLsMRs+RpiLp+LsMuCs+LsMSruCf−SiUin+uCpiLsLsMRs+RpiLp+LsMuCs+LsMSruCf−SiUin+uCp(M2−LpLsLs)[iLsLsMRs+RpiLp+LsMuCs+LsMSruCf−SiUin+uCp](M2−LpLs1)[iLsMRs+RpLsiLp+MuCs+MSruCf−LsSiUin+LsuCp]λ1[MRsiLs+RpLsiLp+MuCs+MSruCf−LsSiUin+LsuCp]λ1[RpLsiLp+LsuCp+MRsiLs+MuCs+MSruCf−LsUinSi]=0=0=0=0=dtdiLp(LsM2−LpLs)=dtdiLp=dtdiLp=dtdiLp=dtdiLp
d ⟨ i L p ⟩ 1 d t = λ − 1 ( R p L s ⟨ i L p ⟩ 1 + L s ⟨ u C p ⟩ 1 + M R s ⟨ i L s ⟩ 1 + M ⟨ u C s ⟩ 1 + M ⟨ S r u C f ⟩ 1 − L s U i n ⟨ S i ⟩ 1 ) − j ω ⟨ i L p ⟩ 1 d ⟨ u C p ⟩ 1 d t = C p − 1 ⟨ i L p ⟩ 1 − j ω ⟨ u C p ⟩ 1 d ⟨ i L s ⟩ 1 d t = λ − 1 ( M R p ⟨ i L p ⟩ 1 + M ⟨ u C p ⟩ 1 + R s L p ⟨ i L s ⟩ 1 + L p ⟨ u C s ⟩ 1 + L p ⟨ S r u C f ⟩ 1 − M U i n ⟨ S i ⟩ 1 ) − j ω ⟨ i L s ⟩ 1 d ⟨ u C s ⟩ 1 d t = C s − 1 ⟨ i L s ⟩ 1 − j ω ⟨ u C s ⟩ 1 d ⟨ u C f ⟩ 0 d t = C f − 1 ⟨ S r i L s ⟩ 0 − C f − 1 R d c − 1 ⟨ u C f ⟩ 0 \begin{equation} \begin{aligned} \frac{d \left\langle i_{L_p}\right\rangle_1}{dt}= & \lambda^{-1}\left(R_p L_s\left\langle i_{L_p}\right\rangle_1+L_s\left\langle u_{C_p}\right\rangle_1+M R_s\left\langle i_{L_s}\right\rangle_1\right. \\ & \left.+M\left\langle u_{C_s}\right\rangle_1+M\left\langle S_r u_{C_f}\right\rangle_1-L_s U_{\mathrm{in}}\left\langle S_i\right\rangle_1\right)-j \omega\left\langle i_{L_p}\right\rangle_1 \\ \frac{d \left\langle u_{C_p}\right\rangle_1}{dt}= & C_p^{-1}\left\langle i_{L_p}\right\rangle_1-j \omega\left\langle u_{C_p}\right\rangle_1 \\ \frac{d\left\langle i_{L_s}\right\rangle_1}{dt}= & \lambda^{-1}\left(M R_p\left\langle i_{L_p}\right\rangle_1+M\left\langle u_{C_p}\right\rangle_1+R_s L_p\left\langle i_{L_s}\right\rangle_1\right. \\ & \left.+L_p\left\langle u_{C_s}\right\rangle_1+L_p\left\langle S_r u_{C_f}\right\rangle_1-M U_{\mathrm{in}}\left\langle S_i\right\rangle_1\right)-j \omega\left\langle i_{L_s}\right\rangle_1 \\ \frac{d\left\langle u_{C_s}\right\rangle_1}{dt}= & C_s^{-1}\left\langle i_{L_s}\right\rangle_1-j \omega\left\langle u_{C_s}\right\rangle_1 \\ \frac{d \left\langle u_{C_f}\right\rangle_0}{dt}= & C_f^{-1}\left\langle S_r i_{L_s}\right\rangle_0-C_f^{-1} R_{\mathrm{dc}}^{-1}\left\langle u_{C_f}\right\rangle_0 \end{aligned} \end{equation} dtd⟨iLp⟩1=dtd⟨uCp⟩1=dtd⟨iLs⟩1=dtd⟨uCs⟩1=dtd⟨uCf⟩0=λ−1(RpLs⟨iLp⟩1+Ls⟨uCp⟩1+MRs⟨iLs⟩1+M⟨uCs⟩1+M⟨SruCf⟩1−LsUin⟨Si⟩1)−jω⟨iLp⟩1Cp−1⟨iLp⟩1−jω⟨uCp⟩1λ−1(MRp⟨iLp⟩1+M⟨uCp⟩1+RsLp⟨iLs⟩1+Lp⟨uCs⟩1+Lp⟨SruCf⟩1−MUin⟨Si⟩1)−jω⟨iLs⟩1Cs−1⟨iLs⟩1−jω⟨uCs⟩1Cf−1⟨SriLs⟩0−Cf−1Rdc−1⟨uCf⟩0
- λ = M 2 − L p L s \lambda = M^2 - L_pL_s λ=M2−LpLs
- d ⟨ x ⟩ n ( t ) d t = ⟨ d x d t ⟩ n ( t ) − j n ω ⟨ x ⟩ n ( t ) \frac{d \langle x\rangle_n(t)}{d t}=\left\langle\frac{d x}{d t}\right\rangle_n(t)-j n \omega\langle x\rangle_n(t) dtd⟨x⟩n(t)=⟨dtdx⟩n(t)−jnω⟨x⟩n(t)
- S i ( t ) = sign ( sin ( ω t ) ) S_i(t) = \operatorname{sign}(\sin(\omega t)) Si(t)=sign(sin(ωt)) , ⟨ S i ⟩ 1 = − i 2 π , ⟨ S i ⟩ 1 R = 0 , ⟨ S i ⟩ 1 I = 2 π \langle S_i \rangle_1 = -i \frac 2\pi, \langle S_i \rangle_1^R = 0, \langle S_i \rangle_1 ^I = \frac2\pi ⟨Si⟩1=−iπ2,⟨Si⟩1R=0,⟨Si⟩1I=π2, S i ( t ) ≈ 4 π sin ( ω t ) S_i(t) \approx \frac4\pi \sin(\omega t) Si(t)≈π4sin(ωt)
- S r ( t ) = sign ( sin ( ω t + π / 2 ) ) S_r(t) = \operatorname{sign}(\sin(\omega t + \pi / 2)) Sr(t)=sign(sin(ωt+π/2)), ⟨ S r ⟩ 1 = 2 π , ⟨ S r ⟩ 1 R = 2 π , ⟨ S r ⟩ 1 I = 0 \langle S_r \rangle_1 = \frac 2 \pi, \langle S_r \rangle_1^R = \frac2\pi, \langle S_r \rangle_1 ^I = 0 ⟨Sr⟩1=π2,⟨Sr⟩1R=π2,⟨Sr⟩1I=0, S r ( t ) ≈ 4 π cos ( ω t ) S_r(t)\approx \frac4\pi \cos(\omega t) Sr(t)≈π4cos(ωt)
[!note]
S i ( t ) = ∑ n = 0 ∞ ⟨ S i ⟩ n e − j n ω t ⟨ S i ( t ) ⟩ 1 = 1 T ∫ − T / 2 T / 2 S i ( t ) e − j ω t d t = 1 T ∫ − T / 2 T / 2 sign ( sin ( ω t ) ) e − j ω t d t = 1 T ( ∫ − T / 2 0 − e − j ω t d t + ∫ 0 T / 2 e − j ω t d t ) = 1 T ( ∫ − T / 2 0 − e − j ω t d t + ∫ 0 T / 2 e − j ω t d t ) = ω 2 π ( 1 j ω e − j ω t ∣ − π ω 0 − 1 j ω e − j ω t ∣ 0 π ω ) = ω 2 π 1 j ω [ ( 1 − e j π ) − ( e − j π − 1 ) ] = ω 2 π 1 j ω [ 2 − ( e j π + e − j π ) ] = ω 2 π 1 j ω [ 2 − 2 cos ( π ) ] = 1 j 2 π 4 = − j 2 π \begin{aligned} S_i(t) &= \sum_{n = 0}^\infty \langle S_i \rangle_n e^{-j n \omega t} \\ \langle S_i (t) \rangle_1 & = \frac{1}{T} \int_{- T / 2}^{T / 2} S_i (t) e^{- j \omega t} dt\\ & = \frac{1}{T} \int_{- T / 2}^{T / 2} \text{sign} (\sin (\omega t)) e^{- j \omega t} dt\\ & = \frac{1}{T} \left( \int_{- T / 2}^0 - e^{- j \omega t} dt + \int_0^{T / 2} e^{- j \omega t} dt \right)\\ & = \frac{1}{T} \left( \int_{- T / 2}^0 - e^{- j \omega t} dt + \int_0^{T / 2} e^{- j \omega t} dt \right)\\ & = \frac{\omega}{2 \pi} \left( \left.\frac{1}{j \omega} e^{- j \omega t} \right|^0_{- \frac{\pi}{\omega} } - \left. \frac{1}{j \omega} e^{- j \omega t} \right|^{\frac{\pi}{\omega}}_0 \right)\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} [(1 - e^{j \pi}) - (e^{- j \pi} - 1)]\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} [2 - (e^{j \pi} + e^{- j \pi})]\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} [2 - 2 \cos (\pi)]\\ & = \frac{1}{j 2 \pi} 4\\ & = - j \frac{2}{\pi} \end{aligned} Si(t)⟨Si(t)⟩1=n=0∑∞⟨Si⟩ne−jnωt=T1∫−T/2T/2Si(t)e−jωtdt=T1∫−T/2T/2sign(sin(ωt))e−jωtdt=T1(∫−T/20−e−jωtdt+∫0T/2e−jωtdt)=T1(∫−T/20−e−jωtdt+∫0T/2e−jωtdt)=2πω(jω1e−jωt −ωπ0−jω1e−jωt 0ωπ)=2πωjω1[(1−ejπ)−(e−jπ−1)]=2πωjω1[2−(ejπ+e−jπ)]=2πωjω1[2−2cos(π)]=j2π14=−jπ2
since c 1 = 1 2 ( a 1 − i b 1 ) c_1 = \frac12(a_1 -ib_1) c1=21(a1−ib1), we have b 1 = 4 π b_1 = \frac 4\pi b1=π4, S i ≈ b 1 sin ( ω t ) = 4 π sin ( ω t ) S_i \approx b_1 \sin(\omega t) = \frac 4 \pi \sin (\omega t) Si≈b1sin(ωt)=π4sin(ωt)Calculate using the below code (in Mathematica):
f = Sign[Sin[w t]]; T = 2 Pi / w; c1 = 1/T Integrate[f Exp[-I w t], {t, 0, T}] a1 = 2 Re[c1] b1 = -2 Im[c1]⟨ S r ( t ) ⟩ 1 = 1 T ∫ − T / 2 T / 2 S r ( t ) e − j ω t d t = 1 T ∫ − T / 2 T / 2 sign ( sin ( ω t + π 2 ) ) e − j ω t d t = 1 T ∫ − T / 2 T / 2 sign ( cos ( ω t ) ) e − j ω t d t = 1 T ( ∫ − T / 2 − T / 4 − e − j ω t d t + ∫ − T / 4 T / 4 e − j ω t d t + ∫ T / 4 T / 2 − e − j ω t d t ) = ω 2 π ( 1 j ω e − j ω t ∣ − π ω − π 2 ω − 1 j ω e − j ω t ∣ − π 2 ω π 2 ω + 1 j ω e − j ω t ∣ π 2 ω π ω ) = ω 2 π 1 j ω [ ( e j π 2 − e j π ) − ( e − j π 2 − e j π 2 ) + ( e − j π − e − j π 2 ) ] = ω 2 π 1 j ω [ ( e − j π − e j π ) + 2 ( e j π 2 − e − j π 2 ) ] = ω 2 π 1 j ω [ − 2 j sin ( π ) + 4 j sin ( π 2 ) ] = ω 2 π 1 j ω 4 j = 2 π \begin{aligned} \langle S_r (t) \rangle_1 & = \frac{1}{T} \int_{- T / 2}^{T / 2} S_r (t) e^{- j \omega t} dt\\ & = \frac{1}{T} \int_{- T / 2}^{T / 2} \text{sign} \left( \sin \left( \omega t + \frac{\pi}{2} \right) \right) e^{- j \omega t} dt\\ & = \frac{1}{T} \int_{- T / 2}^{T / 2} \text{sign} (\cos (\omega t)) e^{- j \omega t} dt\\ & = \frac{1}{T} \left( \int_{- T / 2}^{- T / 4} - e^{- j \omega t} dt + \int_{- T / 4}^{T / 4} e^{- j \omega t} dt + \int_{T / 4}^{T / 2} - e^{- j \omega t} dt \right)\\ & = \frac{\omega}{2 \pi} \left( \left. \frac{1}{j \omega} e^{- j \omega t} \right|^{- \frac{\pi}{2 \omega}}_{- \frac{\pi}{\omega} } - \left. \frac{1}{j \omega} e^{- j \omega t} \right|^{\frac{\pi}{2 \omega}}_{- \frac{\pi}{2 \omega} } + \left. \frac{1}{j \omega} e^{- j \omega t} \right|^{\frac{\pi}{\omega}}_{\frac{\pi}{2 \omega} } \right)\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} \left[ \left( e^{j \frac{\pi}{2}} - e^{j \pi} \right) - \left( e^{- j \frac{\pi}{2}} - e^{j \frac{\pi}{2}} \right) + \left( e^{- j \pi} - e^{- j \frac{\pi}{2}} \right) \right]\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} \left[ (e^{- j \pi} - e^{j \pi}) + 2 \left( e^{j \frac{\pi}{2}} - e^{- j \frac{\pi}{2}} \right) \right]\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} \left[ - 2 j \sin (\pi) + 4 j \sin \left( \frac{\pi}{2} \right) \right]\\ & = \frac{\omega}{2 \pi} \frac{1}{j \omega} 4 j\\ & = \frac{2}{\pi}\end{aligned} ⟨Sr(t)⟩1=T1∫−T/2T/2Sr(t)e−jωtdt=T1∫−T/2T/2sign(sin(ωt+2π))e−jωtdt=T1∫−T/2T/2sign(cos(ωt))e−jωtdt=T1(∫−T/2−T/4−e−jωtdt+∫−T/4T/4e−jωtdt+∫T/4T/2−e−jωtdt)=2πω(jω1e−jωt −ωπ−2ωπ−jω1e−jωt −2ωπ2ωπ+jω1e−jωt 2ωπωπ)=2πωjω1[(ej2π−ejπ)−(e−j2π−ej2π)+(e−jπ−e−j2π)]=2πωjω1[(e−jπ−ejπ)+2(ej2π−e−j2π)]=2πωjω1[−2jsin(π)+4jsin(2π)]=2πωjω14j=π2
a 1 = 2 ⟨ S r ( t ) ⟩ 1 R a_1 = 2\langle S_r (t) \rangle_1^R a1=2⟨Sr(t)⟩1R, S r ≈ a 1 cos ( ω t ) = 4 π cos ( ω t ) S_r\approx a_1 \cos(\omega t) = \frac 4\pi \cos(\omega t) Sr≈a1cos(ωt)=π4cos(ωt)
Calculate using the below code:
f = Sign[Sin[w t + Pi / 2]]; T = 2 Pi / w; c1 = 1/T Integrate[f Exp[-I w t], {t, 0, T}] a1 = 2 Re[c1] b1 = -2 Im[c1][!warning]
Here using the triangular form of transformation will be more convenient !!!
⟨ S r ( t ) ⟩ 1 R = 1 T ∫ − T / 2 T / 2 S r ( t ) cos ( ω t ) d t = 2 π ⟨ S r ( t ) ⟩ 1 I = 1 T ∫ − T / 2 T / 2 S r ( t ) sin ( ω t ) d t = 0 \begin{aligned} \langle S_r(t) \rangle_1^R &= \frac 1 T \int_{-T/2}^{T/2}S_r(t) \cos (\omega t ) dt\\ &= \frac 2 \pi \\ \langle S_r(t) \rangle_1^I &= \frac 1 T \int_{-T/2}^{T/2}S_r(t) \sin (\omega t ) dt\\ &= 0 \end{aligned} ⟨Sr(t)⟩1R⟨Sr(t)⟩1I=T1∫−T/2T/2Sr(t)cos(ωt)dt=π2=T1∫−T/2T/2Sr(t)sin(ωt)dt=0
Code:f = Sign[Sin[w t + Pi / 2]] T = 2 Pi / w a1half = 1/T Integrate[f Cos[w t], {t, 0, T}] b1half = 1/T Integrate[f Sin[w t], {t, 0, T}]
[!note]
Taking the first equation as an example:
d ⟨ i L p ⟩ 1 d t = λ − 1 ( R p L s ⟨ i L p ⟩ 1 + L s ⟨ u C p ⟩ 1 + M R s ⟨ i L s ⟩ 1 + M ⟨ u C s ⟩ 1 + M ⟨ S r u C f ⟩ 1 − L s U i n ⟨ S i ⟩ 1 ) − j ω ⟨ i L p ⟩ 1 d ⟨ i L p ⟩ 1 R d t = λ − 1 ( R p L s ⟨ i L p ⟩ 1 R + L s ⟨ u C p ⟩ 1 R + M R s ⟨ i L s ⟩ 1 R + M ⟨ u C s ⟩ 1 R + M ⟨ S r u C f ⟩ 1 R − L s U i n ⟨ S i ⟩ 1 R ) + ω ⟨ i L p ⟩ 1 I = λ − 1 [ R p L s ⟨ i L p ⟩ 1 R + L s ⟨ u C p ⟩ 1 R + M R s ⟨ i L s ⟩ 1 R + M ⟨ u C s ⟩ 1 R + M ( ⟨ S r ⟩ 0 ⟨ u C f ⟩ 1 R + ⟨ S r ⟩ 1 R ⟨ u C f ⟩ 0 ) − L s U i n ⟨ S i ⟩ 1 R ] + ω ⟨ i L p ⟩ 1 I = ⟨ i L p ⟩ 1 R λ − 1 R p L s + ⟨ i L p ⟩ 1 I ω + ⟨ u C p ⟩ 1 R λ − 1 L s + ⟨ u C p ⟩ 1 I 0 + ⟨ i L s ⟩ 1 R λ − 1 M R s + ⟨ i L s ⟩ 1 I 0 + ⟨ u C s ⟩ 1 R λ − 1 M + ⟨ u C s ⟩ 1 I 0 + ⟨ u C f ⟩ 0 λ − 1 M ⟨ S r ⟩ 1 R d ⟨ i L p ⟩ 1 I d t = λ − 1 ( R p L s ⟨ i L p ⟩ 1 I + L s ⟨ u C p ⟩ 1 I + M R s ⟨ i L s ⟩ 1 I + M ⟨ u C s ⟩ 1 I + M ⟨ S r u C f ⟩ 1 I − L s U i n ⟨ S i ⟩ 1 I ) − ω ⟨ i L p ⟩ 1 R = λ − 1 ( R p L s ⟨ i L p ⟩ 1 I + L s ⟨ u C p ⟩ 1 I + M R s ⟨ i L s ⟩ 1 I + M ⟨ u C s ⟩ 1 I + M ( ⟨ S r ⟩ 0 ⟨ u C f ⟩ 1 I + ⟨ S r ⟩ 1 I ⟨ u C f ⟩ 0 ) − L s U i n ⟨ S i ⟩ 1 I ) − ω ⟨ i L p ⟩ 1 R \begin{aligned} \frac{d \langle i_{L_p} \rangle_1}{dt} & = \lambda^{- 1} (R_p L_s \langle i_{L_p} \rangle_1 + L_s \langle u_{C_p} \rangle_1 + M R_s \langle i_{L_s} \rangle_1 + M \langle u_{C_s} \rangle_1 + M \langle S_r u_{C_f} \rangle_1 - L_s U_{\mathrm{in}} \langle S_i \rangle_1) - j \omega \langle i_{L_p} \rangle_1\\ \frac{d \langle i_{L_p} \rangle^R_1}{dt} & = \lambda^{- 1} \left( R_p L_s \langle i_{L_p} \rangle^R_1 + L_s \langle u_{C_p} \rangle^R_1 + M R_s \langle i_{L_s} \rangle^R_1 + M \langle u_{C_s} \rangle^R_1 + M \langle S_r u_{C_f} \rangle^R_1 - L_s U_{\mathrm{in}} \langle S_i \rangle^R_1 \right) + \omega \langle i_{L_p} \rangle^I_1\\ & = \lambda^{- 1} \left[ R_p L_s \langle i_{L_p} \rangle^R_1 + L_s \langle u_{C_p} \rangle^R_1 + M R_s \langle i_{L_s} \rangle^R_1 + M \langle u_{C_s} \rangle^R_1 + M (\langle S_r \rangle_0 \langle u_{C_f} \rangle^R_1 + \langle S_r \rangle^R_1 \langle u_{C_f} \rangle_0) - L_s U_{\mathrm{in}} \langle S_i \rangle^R_1 \right] + \omega \langle i_{L_p} \rangle^I_1\\ & ={\langle i_{L_p} \rangle^R_1} \lambda^{- 1} R_p L_s + {\langle i_{L_p} \rangle^I_1} \omega +{\langle u_{C_p} \rangle^R_1} \lambda^{- 1} L_s +{\langle u_{C_p} \rangle^I_1} 0 +{\langle i_{L_s} \rangle^R_1} \lambda^{- 1} M R_s +{\langle i_{L_s} \rangle^I_1} 0 +{\langle u_{C_s} \rangle^R_1} \lambda^{- 1} M +{\langle u_{C_s} \rangle^I_1} 0 +{\langle u_{C_f} \rangle_0} \lambda^{- 1} M \langle S_r \rangle^R_1\\ \frac{d \langle i_{L_p} \rangle^I_1}{dt} & = \lambda^{- 1} \left( R_p L_s \langle i_{L_p} \rangle^I_1 + L_s \langle u_{C_p} \rangle^I_1 + M R_s \langle i_{L_s} \rangle^I_1 + M \langle u_{C_s} \rangle^I_1 + M \langle S_r u_{C_f} \rangle^I_1 - L_s U_{\mathrm{in}} \langle S_i \rangle^I_1 \right) - \omega \langle i_{L_p} \rangle^R_1\\ & = \lambda^{- 1} \left( R_p L_s \langle i_{L_p} \rangle^I_1 + L_s \langle u_{C_p} \rangle^I_1 + M R_s \langle i_{L_s} \rangle^I_1 + M \langle u_{C_s} \rangle^I_1 + M (\langle S_r \rangle_0 \langle u_{C_f} \rangle^I_1 + \langle S_r \rangle^I_1 \langle u_{C_f} \rangle_0) - L_s U_{\mathrm{in}} \langle S_i \rangle^I_1 \right) - \omega \langle i_{L_p} \rangle^R_1\end{aligned} dtd⟨iLp⟩1dtd⟨iLp⟩1Rdtd⟨iLp⟩1I=λ−1(RpLs⟨iLp⟩1+Ls⟨uCp⟩1+MRs⟨iLs⟩1+M⟨uCs⟩1+M⟨SruCf⟩1−LsUin⟨Si⟩1)−jω⟨iLp⟩1=λ−1(RpLs⟨iLp⟩1R+Ls⟨uCp⟩1R+MRs⟨iLs⟩1R+M⟨uCs⟩1R+M⟨SruCf⟩1R−LsUin⟨Si⟩1R)+ω⟨iLp⟩1I=λ−1[RpLs⟨iLp⟩1R+Ls⟨uCp⟩1R+MRs⟨iLs⟩1R+M⟨uCs⟩1R+M(⟨Sr⟩0⟨uCf⟩1R+⟨Sr⟩1R⟨uCf⟩0)−LsUin⟨Si⟩1R]+ω⟨iLp⟩1I=⟨iLp⟩1Rλ−1RpLs+⟨iLp⟩1Iω+⟨uCp⟩1Rλ−1Ls+⟨uCp⟩1I0+⟨iLs⟩1Rλ−1MRs+⟨iLs⟩1I0+⟨uCs⟩1Rλ−1M+⟨uCs⟩1I0+⟨uCf⟩0λ−1M⟨Sr⟩1R=λ−1(RpLs⟨iLp⟩1I+Ls⟨uCp⟩1I+MRs⟨iLs⟩1I+M⟨uCs⟩1I+M⟨SruCf⟩1I−LsUin⟨Si⟩1I)−ω⟨iLp⟩1R=λ−1(RpLs⟨iLp⟩1I+Ls⟨uCp⟩1I+MRs⟨iLs⟩1I+M⟨uCs⟩1I+M(⟨Sr⟩0⟨uCf⟩1I+⟨Sr⟩1I⟨uCf⟩0)−LsUin⟨Si⟩1I)−ω⟨iLp⟩1R
- ⟨ S i ⟩ 0 = 0 , ⟨ S i ⟩ 1 R = 0 , ⟨ S i ⟩ 1 I = 2 π \langle S_i \rangle_0 = 0, \langle S_i \rangle^R_1 = 0, \langle S_i \rangle^I_1 = \frac 2\pi ⟨Si⟩0=0,⟨Si⟩1R=0,⟨Si⟩1I=π2
- ⟨ S r ⟩ 0 = 0 , ⟨ S r ⟩ 1 R = 2 π , ⟨ S i ⟩ 1 I = 0 \langle S_r \rangle_0 = 0, \langle S_r \rangle^R_1 = \frac 2\pi, \langle S_i \rangle^I_1 = 0 ⟨Sr⟩0=0,⟨Sr⟩1R=π2,⟨Si⟩1I=0
State space model:
{
x
˙
=
A
⋅
x
+
B
⋅
U
i
n
y
=
⟨
u
C
f
⟩
0
\left\{\begin{array}{l} \dot{\mathbf{x}}=\mathbf{A} \cdot \mathbf{x}+\mathbf{B} \cdot U_{\mathrm{in}} \\ y=\left\langle u_{C_f}\right\rangle_0 \end{array}\right.
{x˙=A⋅x+B⋅Uiny=⟨uCf⟩0
where
x
=
[
⟨
i
L
p
⟩
1
R
,
⟨
i
L
p
⟩
1
I
,
⟨
u
C
p
⟩
1
R
,
⟨
u
C
p
⟩
1
I
,
⟨
i
L
s
⟩
1
R
,
⟨
i
L
s
⟩
1
I
,
⟨
u
C
s
⟩
1
R
,
⟨
u
C
s
⟩
1
I
,
⟨
u
C
f
⟩
0
]
T
A
=
[
R
p
L
s
1
λ
ω
L
s
1
λ
0
M
R
s
1
λ
0
M
1
λ
0
2
1
π
M
1
λ
−
ω
R
p
L
s
1
λ
0
L
s
1
λ
0
M
R
s
1
λ
0
M
1
λ
0
C
p
−
1
0
0
ω
0
0
0
0
0
0
C
p
−
1
−
ω
0
0
0
0
0
0
M
R
p
1
λ
0
M
1
λ
0
R
s
L
p
1
λ
ω
L
p
1
λ
0
2
1
π
L
p
1
λ
0
M
R
p
1
λ
0
M
1
λ
−
ω
R
s
L
p
1
λ
0
L
p
1
λ
0
0
0
0
0
C
s
−
1
0
0
ω
0
0
0
0
0
0
C
s
−
1
−
ω
0
0
0
0
0
0
4
1
π
C
f
−
1
0
0
0
−
C
f
−
1
R
d
c
−
1
]
B
=
[
0
2
1
π
L
s
1
λ
0
0
0
2
1
π
M
1
λ
0
0
0
]
T
\begin{aligned} \mathbf x &= \left[\langle i_{L_p}\rangle_1^R, \langle i_{L_p}\rangle_1^I, \langle u_{C_p}\rangle_1^R, \langle u_{C_p}\rangle_1^I, \langle i_{L_s}\rangle_1^R, \langle i_{L_s}\rangle_1^I, \langle u_{C_s}\rangle_1^R, \langle u_{C_s}\rangle_1^I, \langle u_{C_f}\rangle_0\right]^T\\ \mathbf{A} &=\left[\begin{array}{ccccccccc} R_p L_s \frac{1}{\lambda} & \omega & L_s \frac{1}{\lambda} & 0 & M R_s \frac{1}{\lambda} & 0 & M \frac{1}{\lambda} & 0 & 2 \frac1{\pi} M \frac{1}{\lambda} \\ -\omega & R_p L_s \frac{1}{\lambda} & 0 & L_s \frac{1}{\lambda} & 0 & M R_s \frac{1}{\lambda} & 0 & M \frac{1}{\lambda} & 0 \\ C_p^{-1} & 0 & 0 & \omega & 0 & 0 & 0 & 0 & 0 \\ 0 & C_p^{-1} & -\omega & 0 & 0 & 0 & 0 & 0 & 0 \\ M R_p \frac{1}{\lambda} & 0 & M \frac{1}{\lambda} & 0 & R_s L_p \frac{1}{\lambda} & \omega & L_p \frac{1}{\lambda} & 0 & 2 \frac1{\pi} L_p \frac{1}{\lambda} \\ 0 & M R_p \frac{1}{\lambda} & 0 & M \frac{1}{\lambda} & -\omega & R_s L_p \frac{1}{\lambda} & 0 & L_p \frac{1}{\lambda} & 0 \\ 0 & 0 & 0 & 0 & C_s^{-1} & 0 & 0 & \omega & 0 \\ 0 & 0 & 0 & 0 & 0 & C_s^{-1} & -\omega & 0 & 0 \\ 0 & 0 & 0 & 0 & 4 \frac1{\pi} C_f^{-1} & 0 & 0 & 0 & -C_f^{-1} R_{\mathrm{dc}}^{-1} \end{array}\right] \\ \mathbf{B}&=\left[\begin{array}{lllllllll} 0 & 2 \frac1{\pi} L_s \frac{1}{\lambda} & 0 & 0 & 0 & 2 \frac1{\pi} M \frac{1}{\lambda} & 0 & 0 & 0 \end{array}\right]^T \\ \end{aligned}
xAB=[⟨iLp⟩1R,⟨iLp⟩1I,⟨uCp⟩1R,⟨uCp⟩1I,⟨iLs⟩1R,⟨iLs⟩1I,⟨uCs⟩1R,⟨uCs⟩1I,⟨uCf⟩0]T=
RpLsλ1−ωCp−10MRpλ10000ωRpLsλ10Cp−10MRpλ1000Lsλ100−ωMλ100000Lsλ1ω00Mλ1000MRsλ1000RsLpλ1−ωCs−104π1Cf−10MRsλ100ωRsLpλ10Cs−10Mλ1000Lpλ100−ω00Mλ1000Lpλ1ω002π1Mλ10002π1Lpλ1000−Cf−1Rdc−1
=[02π1Lsλ10002π1Mλ1000]T
- λ = M 2 − L s L p \lambda = M^2 - L_s L_p λ=M2−LsLp
Simulation study
Configuration
SIMULINK 2018a or higher
仿真使用了移相控制,占空比 0.7,本文中的模型没有考虑移相控制,或者可以认为本文的模型是开关管满开的状态,即占空比为1,感兴趣的同学可以自己推导一下,后面有时间我可能会补上详细的推导。
Matlab code:
%---------------------------------------
% This is the simulation from yangHierarchical2018
% Hierarchical multiobjective H-infinity robust control
% design for wireless power transfer system using genetic algorithm
%
%
% hu 2023-03-08 Created
% hu 2023-03-19 Corrected one error in the paper
% hu 2023-04-05 Corrected one error in the paper
% hu 2023-04-10 Applied ODE45 to solve ODE
% hu 2023-05-23 Dual direction phase shift is included and verified
%---------------------------------------
clc,clear,close all
ts = 0;
tf = .05;
Vin = 100;
% [iL1; uC1; iL2; uC2; vo];
flagModOutput = [ 1; 1; 1; 1; 1];
flagSimOutput = flagModOutput;
flagInterpertor = 1; % First order interper for Modelled signals
Rdc = 15;
f = 85e3;
T = 1 / f;
fC = @(L)(1/2/pi/f)^2/L;
fw = @(L,C)1/2/pi/sqrt(L * C);
Cf = 4700e-6;
L1 = 275e-6;
L2 = 275e-6;
C1 = 12.75e-9;
C2 = 12.70e-9;
R2 = .191;
R1 = .192;
M = 91.5e-6;
k12 = M / sqrt(L2 * L1);
u = 100;
D = .7; % Duty which is in 0 to 1;
Phaseshift = D;
lambda = M^2 - L1 * L2;
w = 2 * pi * f;
f1 = fw(L1,C1);
f2 = fw(L2,C2);
Sr1R = sin(pi / 2 * D) * 2 / pi;
Si1I = sin(pi / 2 * D) * 2 / pi;
p1 = R1 * L2 * lambda^-1;
p2 = L2 * lambda^-1;
p3 = M * R2 * lambda^-1;
p4 = M * lambda^-1;
p5 = Sr1R * M * lambda^-1;
s1 = M * R1 * lambda^-1;
s2 = M * lambda^-1;
s3 = R2 * L1 * lambda^-1;
s4 = L1 * lambda^-1;
s5 = Sr1R * L1 * lambda^-1;
c1 = 4 / pi / Cf;
c2 = -1 / Cf / Rdc;
b1 = Si1I * L2 / lambda;
b2 = Si1I * M / lambda;
% ----------------------------
% ---- Consider Cf ----
% ----------------------------
A(1,:) = [p1, w, p2, 0, p3, 0, p4, 0, p5];
A(2,:) = [-w, p1, 0, p2, 0, p3, 0, p4, 0 ];
A(3,:) = [1/C1, 0, 0, w, zeros(1,5)];
A(4,:) = [0, 1/C1, -w, 0, zeros(1,5)];
A(5,:) = [s1, 0, s2, 0, s3, w, s4, 0, s5];
A(6,:) = [0, s1, 0, s2, -w, s3, 0, s4, 0 ];
A(7,:) = [zeros(1,4), 1/C2, 0, 0, w, 0];
A(8,:) = [zeros(1,4), 0, 1/C2, -w, 0, 0 ];
A(9,:) = [zeros(1,4), c1, 0, 0, 0, c2];
B = [0, b1, 0, 0, 0, b2, 0, 0, 0]';
A
B
tspan = [ts,tf];
Relerr = 1e-7; % Relative error bound
Abserr = 1e-6; % Absolute error bound
x0 = zeros(9,1);
xdot = @(t,x)A * x + B * u;
options = odeset('RelTol',Relerr,'AbsTol',Abserr,'Stats','on');
[t,x] =ode45(@(t,x)A * x + B * u,tspan,x0,options);
if(flagModOutput(1)) iL1out = 2 * x(:,1) .* cos(w * t) - 2 * x(:,2) .* sin(w * t); end
if(flagModOutput(2)) uC1out = 2 * x(:,3) .* cos(w * t) - 2 * x(:,4) .* sin(w * t); end
if(flagModOutput(3)) iL2out = 2 * x(:,5) .* cos(w * t) - 2 * x(:,6) .* sin(w * t); end
if(flagModOutput(4)) uC2out = 2 * x(:,7) .* cos(w * t) - 2 * x(:,8) .* sin(w * t); end
if(flagModOutput(5)) voout = x(:,9); end
global ii, ii = 0;
%%
sim WPTWithPhaseShiftControl;
SIM = ans;
if(flagSimOutput(2)) uC1outSIM = SIM.SimData.Data(:,1); end
if(flagSimOutput(1)) iL1outSIM = SIM.SimData.Data(:,2); end
if(flagSimOutput(4)) uC2outSIM = SIM.SimData.Data(:,3); end
if(flagSimOutput(3)) iL2outSIM = SIM.SimData.Data(:,4); end
if(flagSimOutput(5)) vooutSIM = SIM.SimData.Data(:,5); end
toutSIM = SIM.tout;
if(flagInterpertor)
if(flagSimOutput(1)) iL1out = interp1(t,iL1out,toutSIM); end
if(flagSimOutput(2)) uC1out = interp1(t,uC1out,toutSIM); end
if(flagSimOutput(3)) iL2out = interp1(t,iL2out,toutSIM); end
if(flagSimOutput(4)) uC2out = interp1(t,uC2out,toutSIM); end
if(flagSimOutput(5)) voout = interp1(t,voout,toutSIM); end
end
close all
pos = mypos(8);
i = 1;
linewidth = 1.5;
fontsize = 12;
tsplot = 0;
tfplot = tf - T;
M1 = find(toutSIM>tsplot,1);
M2 = find(toutSIM>tfplot,1);
xlim = [tsplot,tfplot];
toutSIMplot = toutSIM(M1:M2,1);
iL1outSIMplot = iL1outSIM(M1:M2,1);
uC1outSIMplot = uC1outSIM(M1:M2,1);
iL2outSIMplot = iL2outSIM(M1:M2,1);
uC2outSIMplot = uC2outSIM(M1:M2,1);
vooutSIMplot = vooutSIM(M1:M2,1);
iL1outplot = iL1out(M1:M2,1);
uC1outplot = uC1out(M1:M2,1);
iL2outplot = iL2out(M1:M2,1);
uC2outplot = uC2out(M1:M2,1);
vooutplot = voout(M1:M2,1);
if(flagModOutput(1))
figure
plot(toutSIMplot,iL1outplot,toutSIMplot,iL1outSIMplot,'linewidth',linewidth);
set(gca,'XLim',xlim);
h = legend('$i_{L1_{GSSA}}$','$i_{L1_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'northeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid on
end
if(flagModOutput(2))
figure
plot(toutSIMplot,uC1outplot,toutSIMplot,uC1outSIMplot,'linewidth',linewidth);
set(gca,'XLim',xlim);
h = legend('$u_{C1_{GSSA}}$', '$u_{C1_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'northeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid on
end
if(flagModOutput(3))
figure
plot(toutSIMplot,iL2outplot,toutSIMplot,iL2outSIMplot,'linewidth',linewidth);
set(gca,'XLim',xlim);
h = legend('$i_{L2_{GSSA}}$','$i_{L2_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'northeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid on
end
if(flagModOutput(4))
figure
plot(toutSIMplot,uC2outplot,toutSIMplot,uC2outSIMplot,'linewidth',linewidth);
set(gca,'XLim',xlim);
h = legend('$u_{C2_{GSSA}}$', '$u_{C2_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'northeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid on
end
if(flagModOutput(5))
figure
plot(toutSIMplot,vooutplot,toutSIMplot,vooutSIMplot,'linewidth',linewidth);
set(gca,'XLim',xlim);
h = legend('$u_{o_{GSSA}}$', '$u_{o_{SIM}}$');
h.Interpreter = 'latex';
h.FontSize = fontsize;
h.Location = 'southeast';
h.Orientation = 'horizon';
set(gcf,'position',pos{i});
i = i + 1;
grid on
end
mypos function:
function pos = mypos(i,figs1,figs2)
% mypos.m 给定 figure 对象个数求解合适的摆放位置向量以防止图片堆叠
% i figure 个数(直接写8就好了,用不到的就放着呗)
% figs1,figs2 figure 对象的长和高
% pos = mypos(i,figs1,figs2) 求出 i 个 figure 对象的合理摆放位置,且大小设置为[figs1,figs2]
% 输出 pos 是元胞数组,使用规范(已生成figure对象后):set(gcf,'position',pos{i})
% Remark 更方便的绘图程序见 myplot.m
% hu 2018-6-11
% hu 2018-8-8 Modified Remark is added
% hu 2018-11-3 Modified Description is updated
if nargin ~= 3
figs = [400,300]; %default size is 560*420, 500*280 is suitable for paper shows
else
figs = [figs1,figs2];
end
if i > 8
disp('too many figures! The maximum number is 8')
end
scr = get(0,'screensize');
for k = 1:i
if k <= 4
pos{k} = [scr(1) + (k - 1) * figs(1),scr(2) + scr(4) / 2,figs];
end
if k > 4
pos{k} = [scr(1) + (k - 5) * scr(3) / 4,scr(2) + 30,figs];
end
end
end
Results
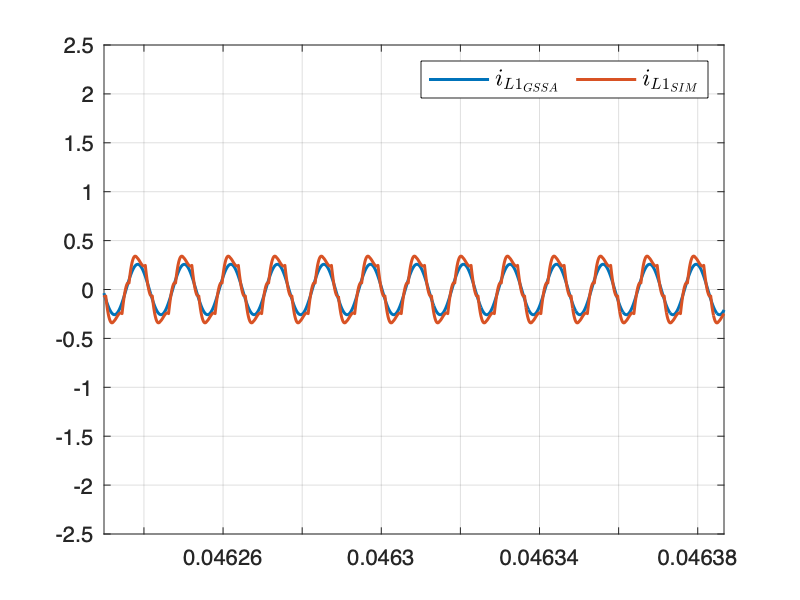
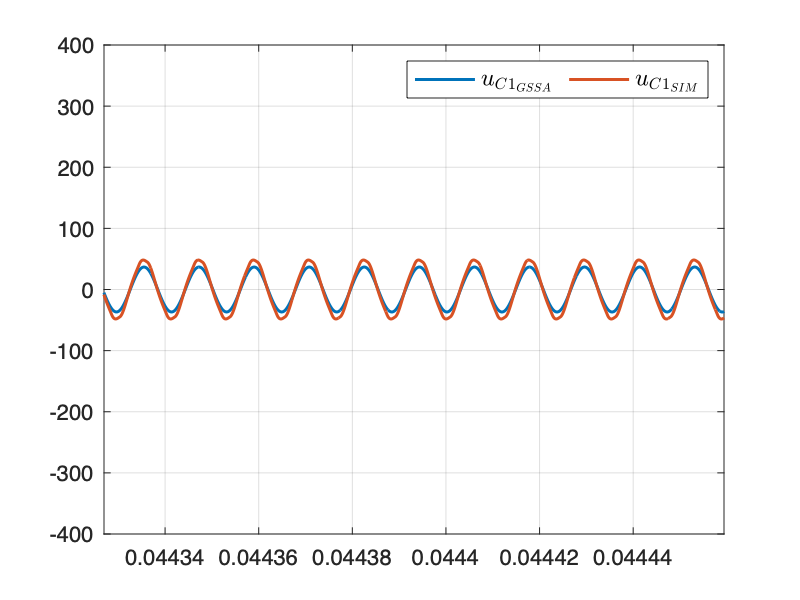
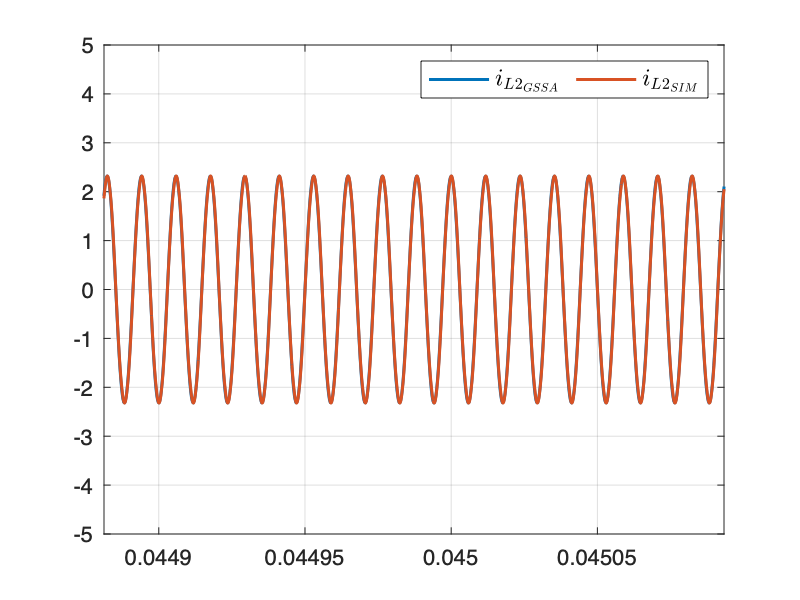
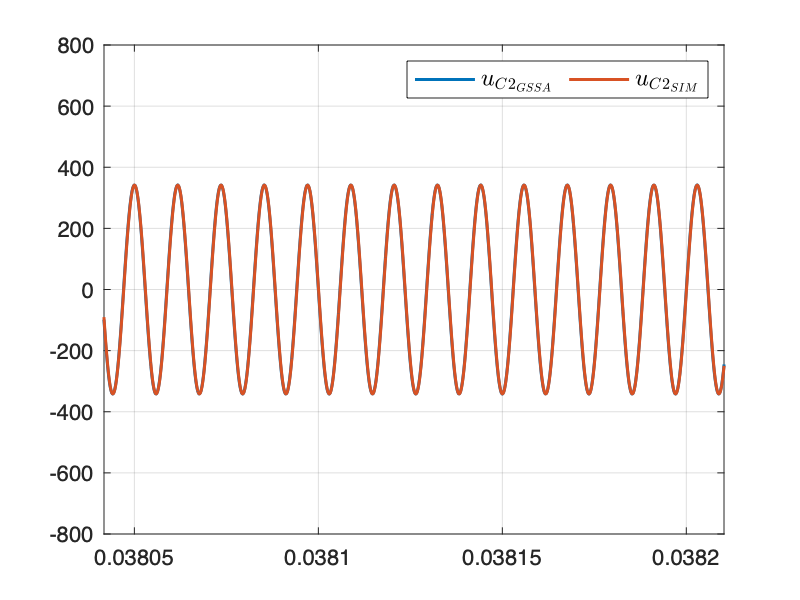
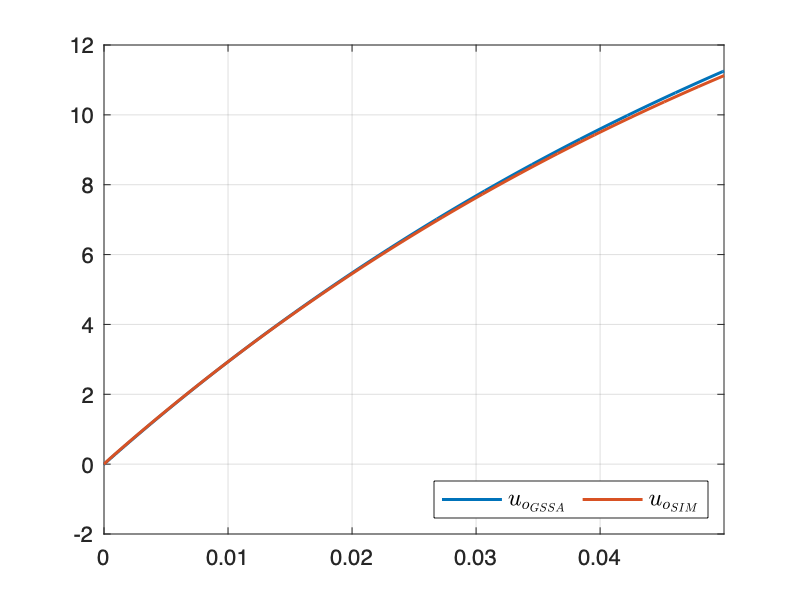
仿真结果与 SIMULINK 模型几乎重合,验证了建模的正确性
仿真模型:
https://download.csdn.net/download/hu3350261/87812337