结构:
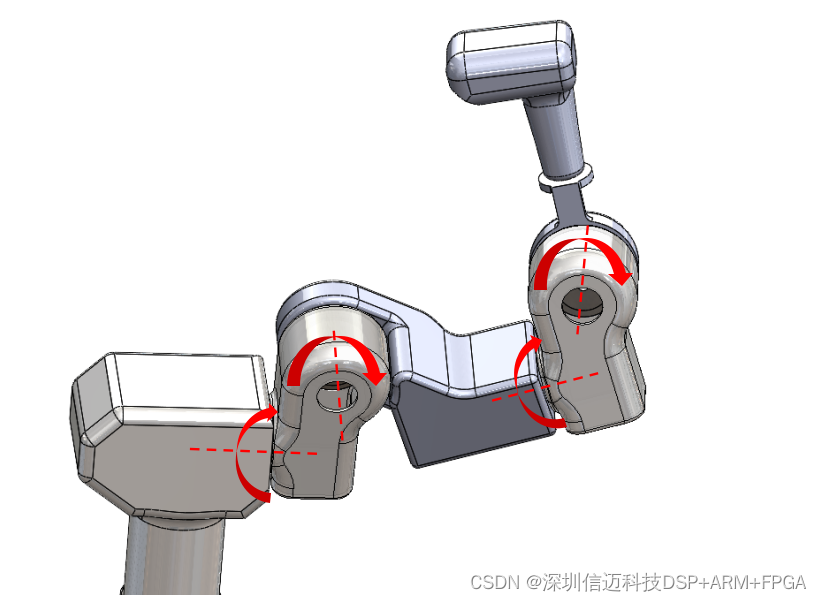
1、下述结构为操控手柄,用于采集人手运动信号,传递至上位机,对其他设备进行遥操控
2、手柄内含4个电机旋转副的手柄机械臂,内置16位分辨率旋转编码器记录角位移;
3、上位机连接手柄电机、器械电机(手柄输出运控控制的执行端)、台架电机(手柄控制的直线运动)、电刀主机(手柄控制实现开关控制)。
功能模块:
- 正向控制(手柄作为控制端):
- 手柄旋转编码器(5)角位移信号控制器械电机;
- 手柄按键:控制设备台架电机;
- 手柄按键:手柄电机主动抱闸及释放;
- 手柄按键控制电刀主机通电/断电;
二.反向控制(手柄受器械反馈控制)
- 手柄根据选定器械位姿调整位姿;
参数输入:
1、上位机通信协议:RS485/Eathercat
2、上位机系统:windows10 后续可能转为Linux
3、旋转编码器分辨率:16位
4、电机输出信号:0:4-20mA RS485
需求实现:
阶段一:
- 分别采集手柄旋转编码器角位移信号输出至上位机
- 将手柄前进/后退按键输入信号输出至上位机并控制台架电机运行;
- 监控悬停按键是否按下,将信号反馈给手柄电机实现主动抱闸/释放;
- 采集手柄电刀开关输入信号输出至上位机并控制外接电刀主机通电/断电;
- 监控手柄电机温度并反馈至上位机;
- 通过软件设置边界区域,限定手柄旋转位移范围;
阶段二:
- 实现器械电机随手柄旋转位移运行;
- 将器械电机旋转编码器角位移信号反馈至手柄电机调整手柄位姿;




![[VRTK4.0]安装VRTKv4Tilia软件包导入程序](https://img-blog.csdnimg.cn/51dcf924ff4a4307918d5c3635ea3f4e.png)