跨时钟信号直接传输在信号跳变时违背本地时钟域的时序要求(建立时间约束,保持时间约束),容易产生亚稳态,无法确定亚稳态何时结束以及结束时保持在何种状态上。
用同步器抑制亚稳态的往下传播的概率,根据情况的不同需要不同的同步器,大致情况如下所示:
- 跨同步时钟域下,快时钟域到慢时钟域 的控制信号传输;
- 跨同步时钟域下,慢时钟域到块时钟域 的控制信号传输;
- 跨同步时钟域下,快时钟域到慢时钟域 的数据信号传输;
- 跨同步时钟域下,慢时钟域到块时钟域 的数据信号传输;
- 跨异步时钟域下,快时钟域到慢时钟域 的控制信号传输;
- 跨异步时钟域下,慢时钟域到块时钟域 的控制信号传输;
- 跨异步时钟域下,快时钟域到慢时钟域 的数据信号传输;
- 跨异步时钟域下,慢时钟域到块时钟域 的数据信号传输;
慢时钟域到快时钟域
理论上讲,快时钟域的信号总会采集到慢时钟域传输来的信号,如果存在异步可能会导致采样数据出错,所以需要进行同步处理。此类同步处理相对简单,一般采用延迟打拍法,或延迟采样法。
延迟打拍法(电平同步)
最常用的同步方法是双级触发器缓存法,俗称延迟打拍法,“打两拍法”。异步信号从一个时钟域进入另一个时钟域之前,将该信号用两级触发器连续缓存两次,可有效降低因为时序不满足而导致的亚稳态问题。电路示意图如下。
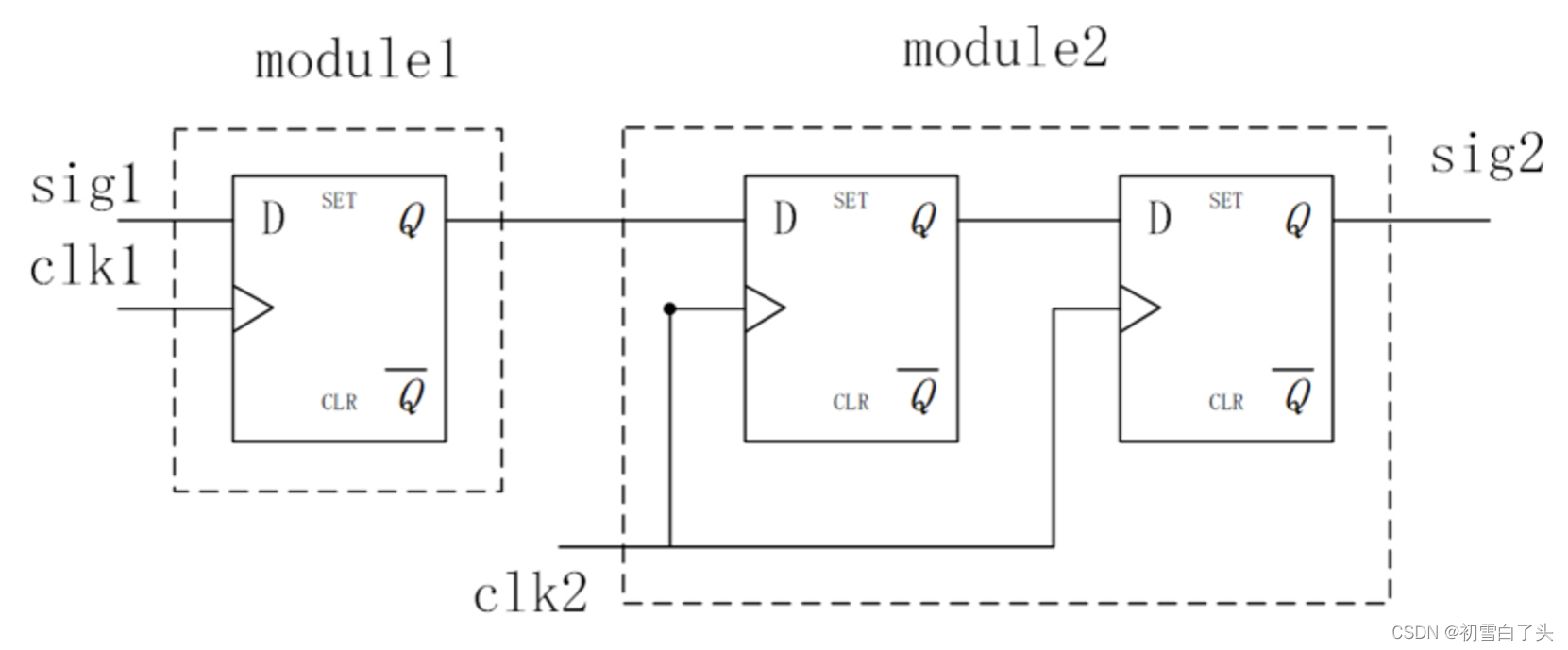
一般设计中使用两级触发器进行缓存即可满足设计时序需求。大量实验表明,三级触发器缓存可解决 99% 以上的此类异步时序问题。
两级触发器延迟打拍并检测信号上升沿的 Verilog 描述如下:
module delay_clap(
input clk1, //异步慢时钟
input sig1, //异步信号
input rstn, //复位信号
input clk2, //目的快时钟域市政
output sig2); //快时钟域同步后的信号
reg [2:0] sig2_r ; //3级缓存,前两级用于同步,后两节用于边沿检测
always @(posedge clk2 or negedge rstn) begin
if (!rstn) sig2_r <= 3'b0 ;
else sig2_r <= {sig2_r[1:0], sig1} ; //缓存
end
assign sig2 = sig2_r[1] && !sig2_r[2] ; //上升沿检测
如果两个时钟的频率相差较小,可能还需要对数据进行延迟缓存,以保证采集到的是当拍时钟的数据;
延迟采样法(脉冲同步器)
此方法主要针对多位宽的数据传输。
例如当两个异步时钟频率比为 5 时,可以先用延迟打拍的方法对数据使能信号进行 2 级打拍缓存,然后再在快时钟域对慢时钟域的数据信号进行采集。
该方法的基本思想是保证信号被安全采集的时刻,而不用同步多位宽的数据信号,可节省部分硬件资源。对应慢时钟域到块时钟域 的控制信号传输;
利用打拍的方法进行延迟采样的 Verilog 描述如下。
//同步模块工作时钟为 100MHz 的模块
//异步数据对来自工作时钟为 20MHz 的模块
module delay_sample(
input rstn,
input clk1,
input [31:0] din,
input din_en,
input clk2,
output [31:0] dout,
output dout_en);
//sync din_en
reg [2:0] din_en_r ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn) din_en_r <= 3'b0 ;
else din_en_r <= {din_en_r[1:0], din_en} ;
end
wire din_en_pos = din_en_r[1] && !din_en_r[2] ;
//sync data
reg [31:0] dout_r ;
reg dout_en_r ;
always @(posedge clk2 or negedge rstn) begin
if (!rstn)
dout_r <= 'b0 ;
else if (din_en_pos)
dout_r <= din ;
end
//dout_en delay
always @(posedge clk2 or negedge rstn) begin
if (!rstn) dout_en_r <= 1'b0 ;
else dout_en_r <= din_en_pos ;
end
assign dout = dout_r ;
assign dout_en = dout_en_r ;
endmodule
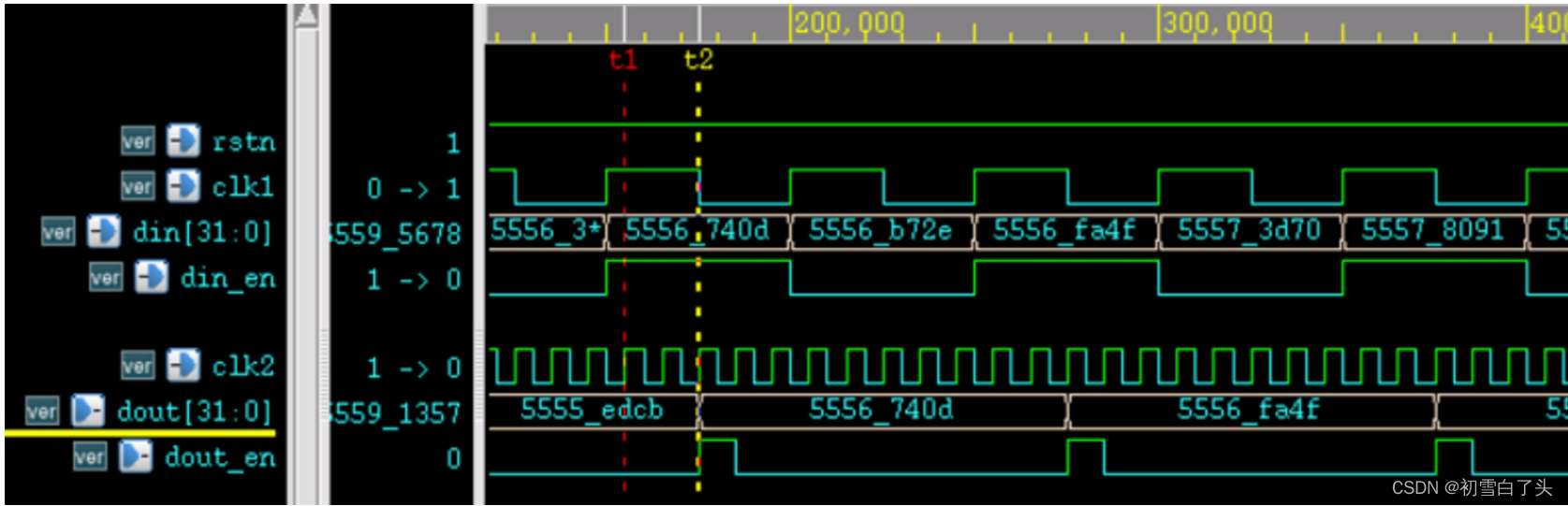
该方法时序结果图如下所示。
显然,在 clk2 时钟域,t2 时刻对数据进行采样缓存比 t1 时刻要安全的多。
但如果慢时钟域没有数据使能信号 din_en, 或数据使能信号一直有效,此时在快时钟域对数据使能信号进行上升沿检测的方法将会失效。因为数据使能信号一直有效,除了第一个数据,快时钟域将无法检测到后继数据的传输时刻。
解决方法就是,增加控制信号。
快时钟域到慢时钟域
信号从快时钟域传输到慢时钟域来时,需要根据信号的特点来进行同步处理。对于单 bit 信号,一般可按电平信号和脉冲信号来区分。
电平信号同步
同步逻辑设计中,电平信号是指长时间保持不变的信号。保持不变的时间限定是相对于慢时钟而言的。只要快时钟的信号保持高电平或低电平的时间足够长,以至于能被慢时钟在满足时序约束的条件下采集到,就可以认为该信号为电平信号。
既然电平信号能够被安全的采集到,所以从快时钟域到慢时钟域的电平信号也采用延迟打拍的方法做同步。
脉冲信号同步
同步逻辑设计中,脉冲信号是指从快时钟域输出的有效宽度小于慢时钟周期的信号。如果慢时钟域直接去采集这种窄脉冲信号,有可能会漏掉。
假如这种脉冲信号脉宽都是一致的,在知道两个时钟频率比的情况下,可以采用"快时钟域脉宽扩展(可选项)+慢时钟域延迟打拍"的方法进行同步。
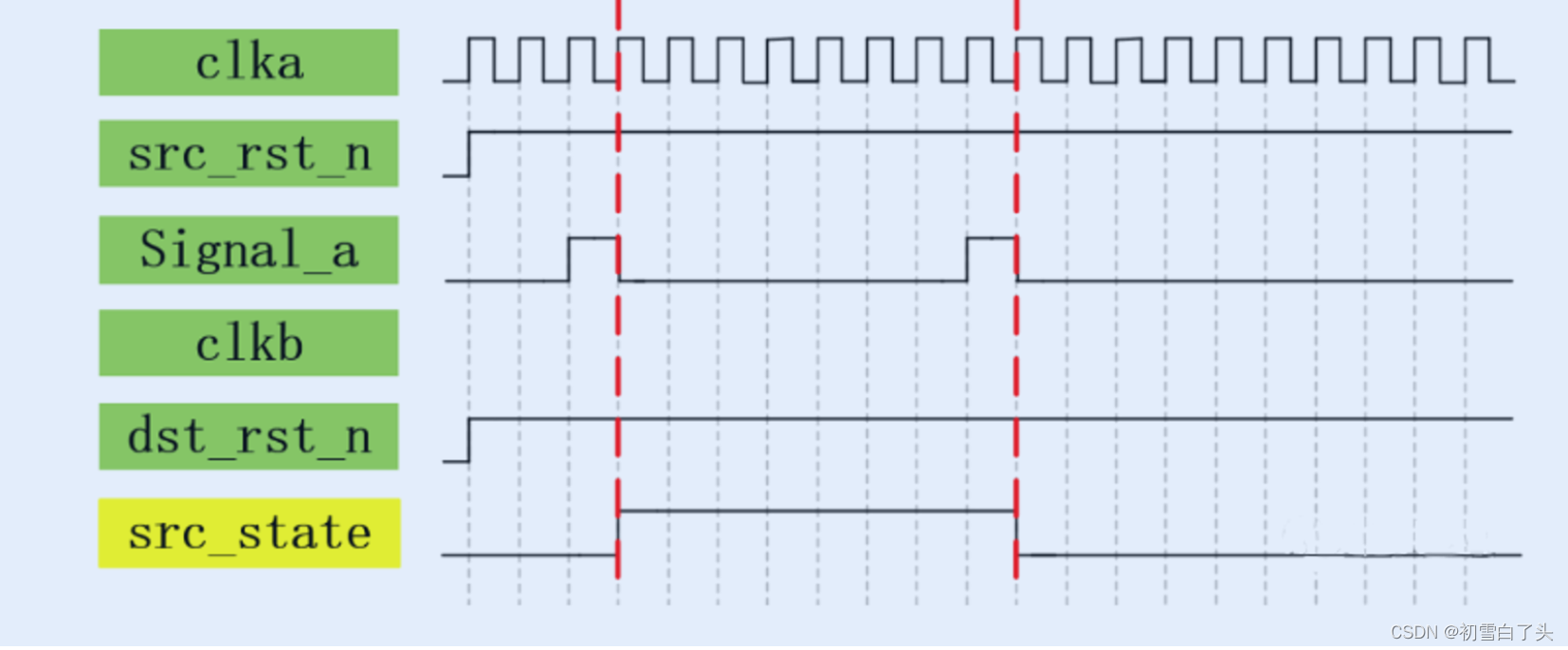
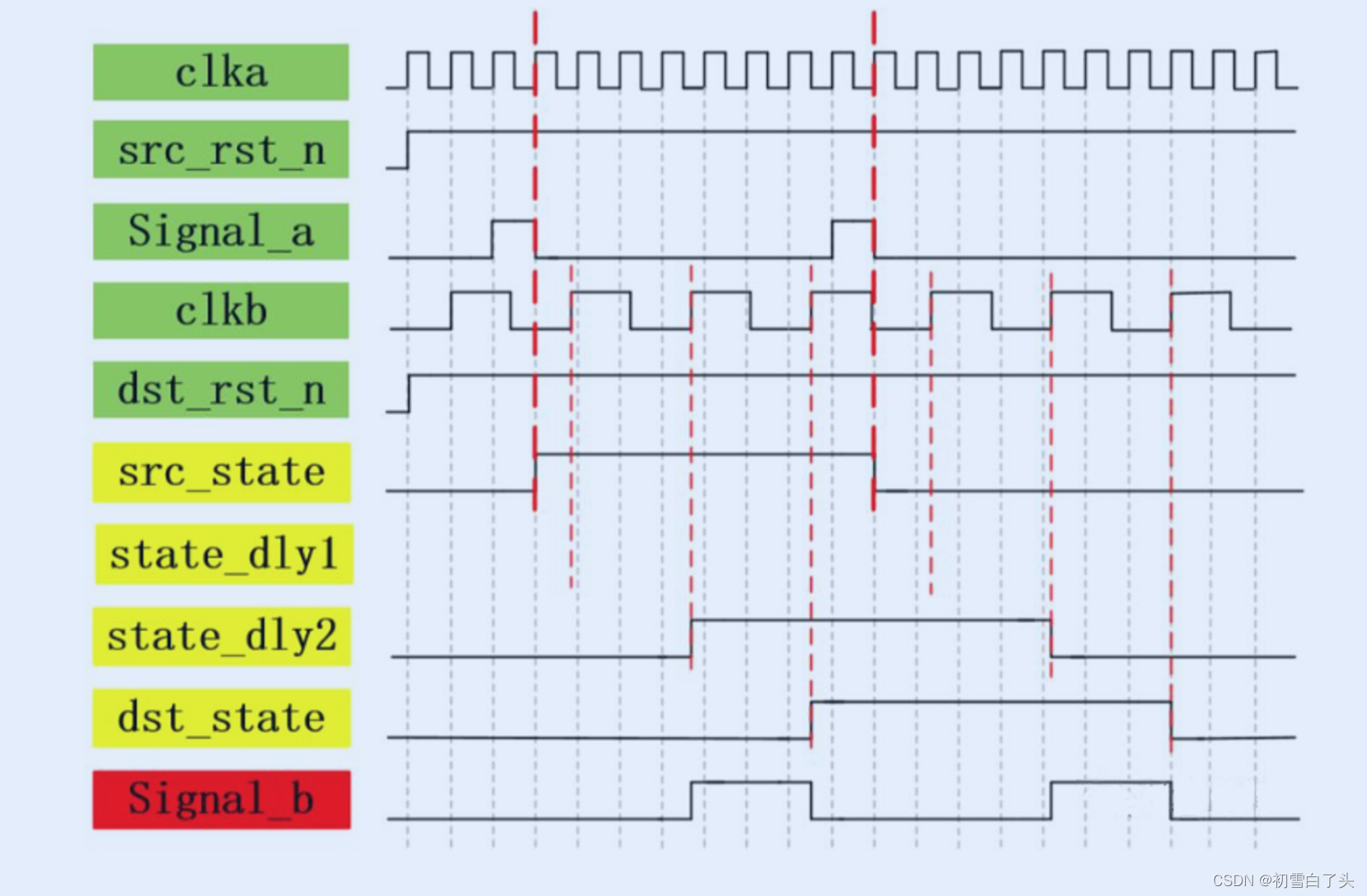
具体思路,如果能够让同步于快速时钟域clka下的脉冲信号Signal_a变长到可以让慢速时钟域clkb检测到这个问题,就可以完美解决了。所以先将快速时钟域clka下的脉冲信号Signal_a,在快速时钟域clka的作用下,变为沿信号,产生一个名为src_state的中间变量来作为脉冲信号Signal_a变成的沿信号。如下图所示,每当快速时钟域clka检测到Signal_a脉冲信号为高时,让src_state信号取反,使得Signal_a的第一个脉冲变为src_state信号的上升沿,Signal_a的第二个脉变为src_state信号的下降沿,后面如果Signal_a信号还有脉冲依然是变为src_state信号的上升沿和下降沿。
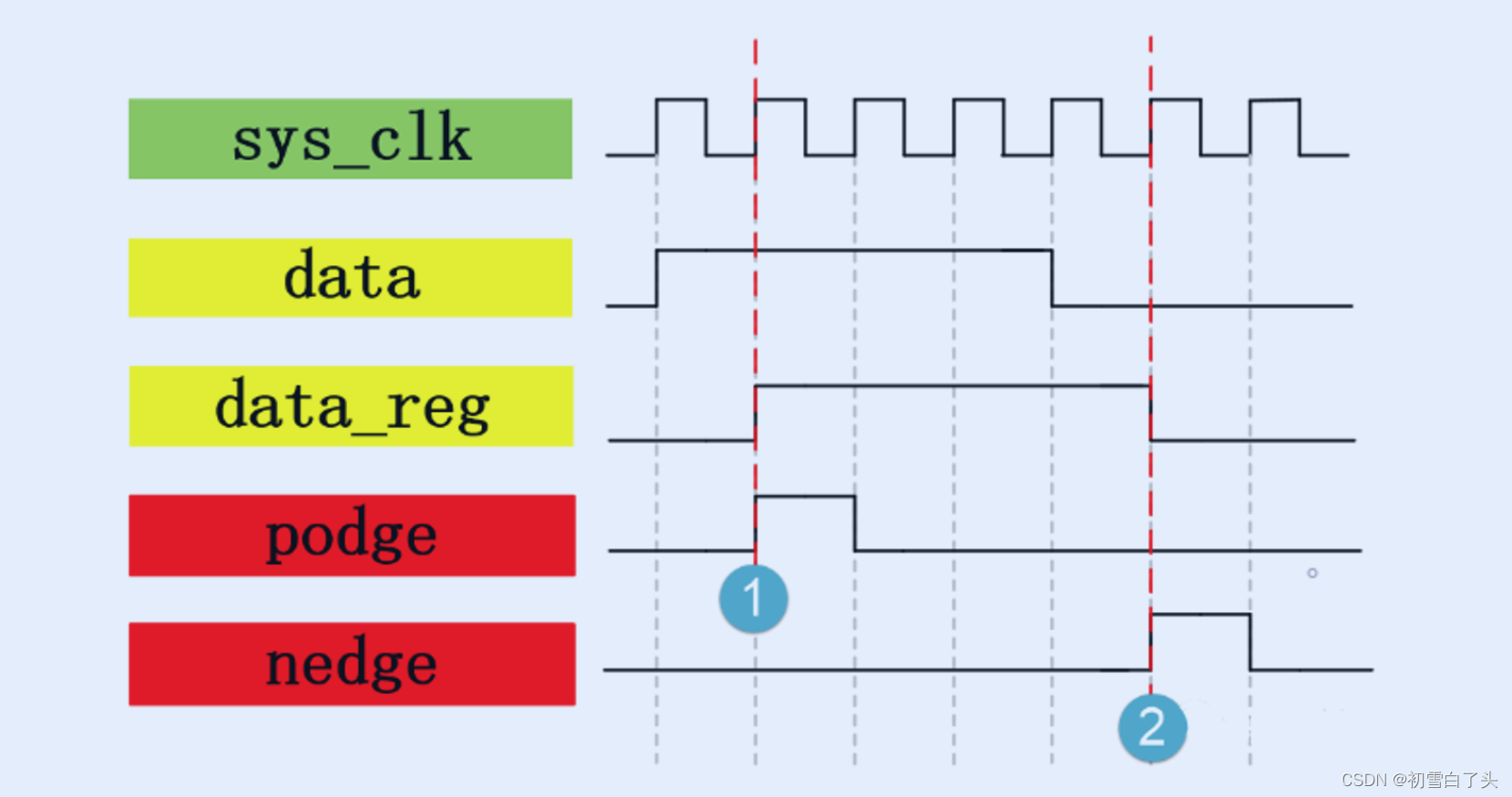
最后一步需要做的那就是将变为state_dly2信号的“沿”再转化为脉冲信号。这就需要引入了另一个新的知识——边沿检测。边沿检测主要作用是能够准确的识别出信号的上升沿或下降沿,也就是希望当上升沿或下降沿来临时,能够产生一个唯一标识上升沿或下降沿的脉冲信号来告诉上升沿或下降沿来了,然后再根据这个脉冲信号启动下一级操作。如下图所示,对同一信号打一拍后在①位置处检测到上升沿,拉高一个时钟的脉冲;在②位置处检测到下降沿,拉高一个时钟的脉冲。边沿检测通常是两级寄存器缓存然后异或可以实现。
由前面的分析知道src_dtate信号在慢速时钟域clkb的采样下得到的state_dly1信号可能是不稳定的,而state_dly2信号是稳定的,不能直接用state_dly1和state_dly2来产生沿标志信号,因为state_dly1的不稳定性可能会导致产生的下降沿标志信号也不稳定,所以需要将state_dly2信号再打一拍,产生dst_state信号,用state_dly2信号和dst_state信号产生上升沿和下降沿标志信号还原脉冲,这就是为什么看到一共打了三拍的原因。还原后的波形如下所示
RTL代码如下所示:
module fast_to_slow(
input wire clka , //sourceclock
input wire src_rst_n , //sourceclock reset (0:reset)
input wire Signal_a , //sourceclock pulse in
input wire clkb , //destinationclock
input wire dst_rst_n , //destinationclock reset (0:reset)
outputwire Signal_b //destinationpulse out
);
reg src_state ;
reg state_dly1 ;
reg state_dly2 ;
reg dst_state ;
//将脉冲信号转化为沿信号
always@(posedge clka ornegedge src_rst_n)
if(src_rst_n ==1'b0)
src_state<=1'b0;
elseif(Signal_a ==1'b1)
src_state<=~src_state;
//将展宽的脉冲打三拍
always@(posedge clkb ornegedge dst_rst_n)
if(dst_rst_n ==1'b0)begin
state_dly1 <=1'b0;
state_dly2 <=1'b0;
dst_state <=1'b0;
end
elsebegin
state_dly1 <= src_state;
state_dly2 <= state_dly1;
dst_state <= state_dly2;
end
//上升沿和下降沿同时检测
assign Signal_b = dst_state ^ state_dly2;
endmodule
其实在使用的这种脉冲同步法来解决单比特信号从快速时钟域同步到慢速时钟域的问题是有一定缺陷的,比如输入脉冲的间隔至少是两个同步器时钟周期,这个时候就需要对沿信号进行展宽。
握手信号同步
如果有时窄脉冲信号又表现出电平信号的特点,即有时信号的有效宽度大于慢时钟周期而能被慢时钟采集到,那么对此类信号再进行脉冲扩展显然是不经济的。此时,可通过"握手传输"的方法进行同步。
假设脉冲信号的高电平期间为有效信号期间,其基本原理如下。
- (1) 快时钟域对脉冲信号进行检测,检测为高电平时输出高电平信号 pulse_fast_r。或者快时钟域输出高电平信号时,不要急于将信号拉低,先保持输出信号为高电平状态。
- (2) 慢时钟域对快时钟域的信号 pulse_fast_r 进行延迟打拍采样。因为此时的脉冲信号被快时钟域保持拉高状态,延迟打拍肯定会采集到该信号。
- (3) 慢时钟域确认采样得到高电平信号 pulse_fast2s_r 后,再反馈给快时钟域。
- (4) 快时钟域对反馈信号 pulse_fast2s_r 进行延迟打拍采样。如果检测到反馈信号为高电平,证明慢时钟域已经接收到有效的高电平信号。如果此时快时钟域自身逻辑不再要求脉冲信号为高电平状态,拉低快时钟域的脉冲信号即可。
此方法实质是通过相互握手的方式对窄脉冲信号进行脉宽扩展。
利用握手信号进行同步处理的 Verilog 模型描述如下。
//同步模块工作时钟大约为 25MHz 的模块
//异步数据对来自工作时钟为 100MHz 的模块
module pulse_syn_fast2s
#( parameter PULSE_INIT = 1'b0
)
(
input rstn,
input clk_fast,
input pulse_fast,
input clk_slow,
output pulse_slow);
wire clear_n ;
reg pulse_fast_r ;
/**************** fast clk ***************/
//(1) 快时钟域检测到脉冲信号时,不急于将脉冲信号拉低
always@(posedge clk_fast or negedge rstn) begin
if (!rstn)
pulse_fast_r <= PULSE_INIT ;
else if (!clear_n)
pulse_fast_r <= 1'b0 ;
else if (pulse_fast)
pulse_fast_r <= 1'b1 ;
end
reg [1:0] pulse_fast2s_r ;
/************ slow clk *************/
//(2) 慢时钟域对信号进行延迟打拍采样
always@(posedge clk_slow or negedge rstn) begin
if (!rstn)
pulse_fast2s_r <= 3'b0 ;
else
pulse_fast2s_r <= {pulse_fast2s_r[0], pulse_fast_r} ;
end
assign pulse_slow = pulse_fast2s_r[1] ;
reg [1:0] pulse_slow2f_r ;
/********* feedback for slow clk to fast clk *******/
//(3) 对反馈信号进行延迟打拍采样
always@(posedge clk_fast or negedge rstn) begin
if (!rstn)
pulse_slow2f_r <= 1'b0 ;
else
pulse_slow2f_r <= {pulse_slow2f_r[0], pulse_slow} ;
end
//控制快时钟域脉冲信号拉低
assign clear_n = ~(!pulse_fast && pulse_slow2f_r[1]) ;
endmodule
仿真结果如下,由图可知:
-
(1) 快时钟域单个窄脉冲信号被慢时钟域采集到,但是同步后的信号延迟较长,脉冲宽度较大。信号延迟是因为延迟打拍和反馈清零决定的,无法避免。脉宽过大问题,可以通过延迟打拍进行边沿检测的方法处理。
-
(2) 两个紧临的窄脉冲信号同步后的信号脉宽与单个窄脉冲同步后的信号脉宽没有差异,也就是说,同步电路漏掉了第二个窄脉冲的检测。这也属于握手传输处理同步问题的特点,当快时钟域的脉冲信号变化速率过快时,该方法不能分辨相邻的脉冲。
-
(3) 当多个宽窄脉冲信号相邻较近时,虽然该同步方法不能分辨多个脉冲信号,但同步后的信号脉宽可能会相对大一些。

多位宽数据同步
当多位宽数据进行同步时,如果该数据各 bit 位都可以看作电平信号,即相对一段时间内各 bit 位数据均可以保持不变以至于能被慢时钟采集到,可以消耗一些触发器资源对多位宽数据进行简单的延迟打拍同步。
如果是少量多位宽数据,使用握手信号同步或者展宽信号+脉冲信号同步的方式传输控制信号也是可以实现的。
但如果数据变化速率过快,就不能再使用延迟打拍采样的方法。因为此时数据各 bit 位不再是电平信号,变化的时间也参差不齐,用异步时钟进行打拍采样,可能会采集到因路径延迟不同而导致的错误数据。
解决此类异步问题的常用方法是采用异步 FIFO (First In First Out)。
除此之外,也可以进行分时读写(乒乓操作),
基本原理就是有两个存储单元,比较常用的存储单元为双口RAM(Dual RAM),SRAM,SDRAM,FIFO等。第一个存储周期对第一个存储单元进行写操作,第二个存储周期对第二个存储单元进行写操作,并与此同时对第一个存储单元进行读操作。第三个存储周期对第一个存储单元进行写操作,并对第二个存储单元进行读操作,循环往复。
乒乓操作的优点:
通过“输入数据选择单元”和“输出数据选择单元”按节拍、相互配合的切换,将经过缓冲的数据流没有停顿地送到“数据流运算处理模块”进行运算与处理。把乒乓操作模块当做一个整体,站在这个模块的两端看数据,输入数据流和输出数据流都是连续不断的,没有任何停顿,因此非常适合对数据流进行流水线式处理。所以乒乓操作常常应用于流水线式算法,完成数据的无缝缓冲与处理。
当写数据的时钟远慢于读时钟,可以只使用一个存储单元,例如写时钟为10MHz,读时钟为100MHz,每当写入10个数据时,读已经可以读出100个数据了,此时就可以使用一个深度为128的FIFO,读写双方各自计数。我们保持写操作持续不断,每当写数据计数到100时,便开始读数据100个,当读完后便等待下一次写数据计数到100,此时最多同时占用110的深度,仍还有18个空余位置,所以读写操作不会产生冲突导致写数据时产生拥塞,导致数据丢失的问题,其实就等同于乒乓操作中的两个存储单元在同一FIFO中。
参考:IC设计中的多时钟域处理方法总结