Inertial Explorer处理pospac数据的过程包括:1)从pospac提取出gps数据和imu数据;2)gps数据转成rinex格式;3)imu数据转成imr格式;4)IE对gps数据进行PPP解算;5)紧耦合融合解算;6)输出结果。
1、pospac提取gps数据和imu数据
采用Terrapos批处理文件extract_applanix.bat,仅指定pospac文件的目录就可以转换了。转换后的文件包括mgps.dat和imu.dat。使用RT272DAT.exe将mgps.dat的主天线和定向天线拆开,分别生成dat文件。
rt272dat -n0 mgps.dat ant1.dat
rt272dat -n1 mgps.dat ant2.dat
2、gps数据转成rinex格式
打开windows命令,使用GPS预处理软件TEQC,命令行为:teqc +C2 +L2C_L2 +relax +max_rx_SVs 50 +L5 +L7 +CA_L1 -week 2022/04/18 ant1.dat > ant10108.22o,转成rinex文件。
POSMV天线型号Trimble ATT1675-540。
3、新建一个empty项目,导入gps和imu数据
1)转换gps数据
点击Tools/Convert Raw GNSS to GPB,打开Convert Raw GNSS data to GPB对话框,把转化后的rinex文件加入要进行数据转换的列表中,点击按钮“Options”,打开rinex options 对话框,设置GPS数据模式为Kinematic,关闭rinex options对话框,点击“Convert”按钮。
正在上传…重新上传取消
正在上传…重新上传取消
点击“Convert”按钮,rinex文件转成gpb文件。
正在上传…重新上传取消
2)转换IMU数据
点击Tools/Convert Raw IMU Data to Waypoint Generic(IMR),打开Waypoint IMU Data Conversion对话框,选择posmv的imu.dat,IMU Profiles 选择自定义格式IMU02,打开点击“Modify”按钮,设置imu.dat文件的格式。
正在上传…重新上传取消
在TerraPos中,此imu.dat的格式为aerocontrol-IGI-IId,Inverse gyro scaling factor为262144,Inverse accelerometer scaling factor为16384。
正在上传…重新上传取消
在IMU02的Gyroscope Measurements和Accelerometer Measurements参数中填上对应的数值。点击“保存”按钮,关闭Profile:IMU02对话框。
正在上传…重新上传取消
点击“Convert“按钮。
正在上传…重新上传取消
3)点击File/Add Remote File添加转换后的GNSS数据。
正在上传…重新上传取消
点击View/GNSS Observations/remote/View Raw GNSS Data,查看GNSS数据。
正在上传…重新上传取消
点击File/Add IMU FileIMU添加转换后的IMU数据。
4)处理GNSS数据。Processing Method选择PPP方式,Profile选择GNSS Marine。
正在上传…重新上传取消
报错,没有星历文件。
正在上传…重新上传取消
点击File/Add Precision/Alternate Files,下载星历文件。
正在上传…重新上传取消
星历文件下载完成。
正在上传…重新上传取消
重新处理GNSS数据。
正在上传…重新上传取消
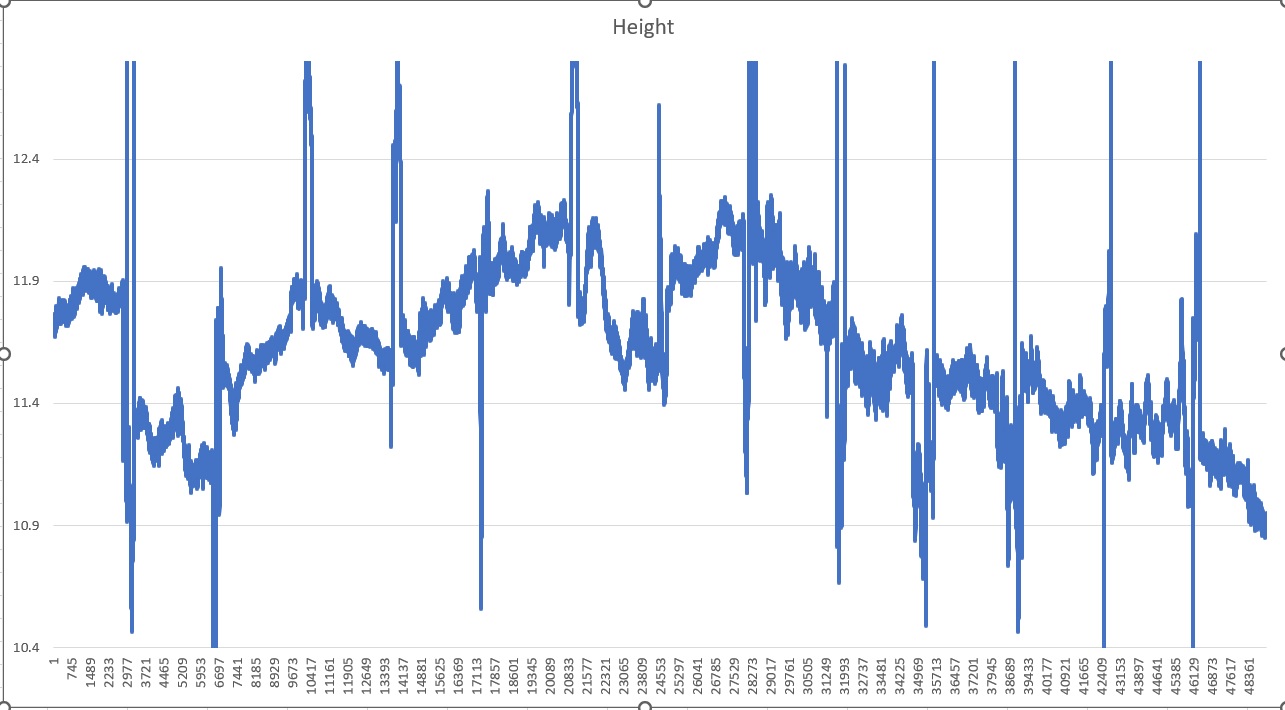
解算结果中Height曲线见下图:
正在上传…重新上传取消
水位计实测潮位曲线见下图:
正在上传…重新上传取消
TerraPos解算结果的Height曲线见下图:
PRIDE-PPPAR解算结果的Height曲线见下图:
正在上传…重新上传取消
从上面解算结果看,三种软件的PPP解算结果的高程曲线都不理想,与水位计实测的潮位曲线相差较大。高程曲线的拟合曲线可能会与潮位曲线的形态有点相似,一定程度上会反映出潮时和潮差,给潮位预报提供一些参考。
5)回到正题,接下来进行进行紧耦合解算,点击Process/Process TC(Tightly Coupled)。在打开的Process Tightly Coupled对话框中设置参数,Processing Setting 选择SPAN Marine,IMU To GNSS antenna的偏移量,方向是向前为正,向右为正,向上为正。
正在上传…重新上传取消
点击“Process”按钮,开始处理。
正在上传…重新上传取消
中间报了一个错:
FATAL ERROR:RE-Alignment failed:
INS coarse alignment(kinematic):R:0.317 P:-1.110 Y:-57.275 dR:0.000 dP:0.000 dY:16.351
正在上传…重新上传取消
重新设置Processing Direction,仍然报错,提示需要改一下开始时间。
重新设置Processing Direction,关闭Multi-pass,仍然报错,也是提示要改一下开始时间。
正在上传…重新上传取消
改时间范围,开始时间不变,结束时间改为169000。
正在上传…重新上传取消
报错,继续改时间范围,开始时间改为121000,IMU时间改为同GNSS时间。
未报错,平滑。
正在上传…重新上传取消
解算完以后,程序窗口出现了Smoothed TC Combined-Map图,完全搞不懂这个图是什么意思?
正在上传…重新上传取消
点击菜单Output/Export Wizard,设置导出文件格式。
正在上传…重新上传取消
按照自定义格式导出结果。
正在上传…重新上传取消
导出文件的内容见下图,这都是些什么呀。
正在上传…重新上传取消
小结
本文的Height曲线对比结果可以看出:1)GNSS/INS的反演潮位关键在于GNSS的解算,如果GNSS解算较差,GNSS/INS组合解算结果没有什么意义。GNSS的PPP解算结果并不是很理想,有前辈曾建议在船舶上固定安装双频GNSS,记录从船舶离港至返港的全程原始数据。现在看来,这个很有可能是正规路子。当然,博主有点不甘心,因为前前后后花了这么多时间和精力,得到一个如此结果。
POSMV有自己的后处理软件叫Pospac MMS,不知道哪位同学有这款软件,能否帮博主解算一下,感谢。
正在上传…重新上传取消
参考文献
terrapos处理pospac数据
terrapos处理pospac数据(二)