手眼标定方法已经有很多博客进行解析,但是都是针对机器人的手(夹爪)眼睛(相机)进行标定。例如:
标定学习笔记(四)-- 手眼标定详解
手眼标定_全面细致的推导过程
本文主要描述多激光雷达应用中如何使用手眼标定的方法进行标定。
假如存在以下问题,在一个小车上存在两个激光雷达,激光雷达A与激光雷达B,须求解激光雷达B到激光雷达A的转换参数
B
A
T
^A_BT
BAT(外参)。
利用手眼标定方法原理如下:
变量定义
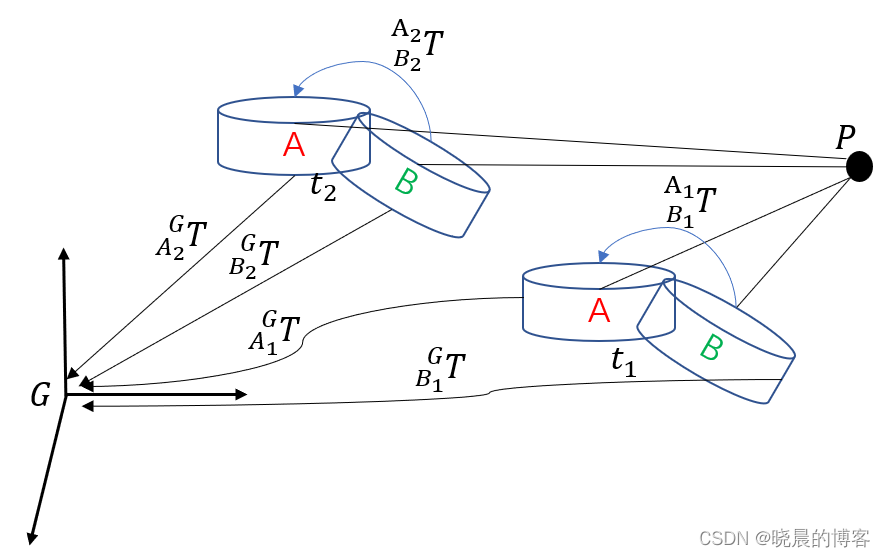
如上图中所示,存在一个世界坐标系G,点
P
P
P在世界坐标系中的坐标为
P
G
P_G
PG。
在
t
1
t_1
t1时刻,激光雷达A与激光雷达B分别观测到点
P
P
P的坐标为:
P
A
1
P_{A1}
PA1,
P
B
1
P_{B1}
PB1。
在
t
2
t_2
t2时刻,激光雷达A与激光雷达B分别观测到点
P
P
P的坐标为:
P
A
2
P_{A2}
PA2,
P
B
2
P_{B2}
PB2。
在
t
1
t_1
t1时刻,激光雷达A与激光雷达B分别到全局坐标系
G
G
G的转换关系为:
A
1
G
T
^{G}_{A1}T
A1GT,
B
1
G
T
^{G}_{B1}T
B1GT。
在
t
2
t_2
t2时刻,激光雷达A与激光雷达B分别到全局坐标系
G
G
G的转换关系为:
A
2
G
T
^{G}_{A2}T
A2GT,
B
2
G
T
^{G}_{B2}T
B2GT。
在
t
1
t_1
t1时刻,激光雷达A与激光雷达B之间的转换关系为
B
1
A
1
T
^{A1}_{B1}T
B1A1T
在
t
2
t_2
t2时刻,激光雷达A与激光雷达B之间的转换关系为
B
2
A
2
T
^{A2}_{B2}T
B2A2T
推导过程
在 t 1 t_1 t1时刻,点 P P P在世界坐标系中的坐标 P G P_G PG可以通过下式计算:
P
G
=
(
A
1
G
T
)
(
B
1
A
1
T
)
P
B
1
P_G=(^{G}_{A1}T)(^{A1}_{B1}T)P_{B1}
PG=(A1GT)(B1A1T)PB1
在
t
2
t_2
t2时刻,
P
G
=
(
A
2
G
T
)
(
B
2
A
2
T
)
P
B
2
P_G=(^{G}_{A2}T)(^{A2}_{B2}T)P_{B2}
PG=(A2GT)(B2A2T)PB2
由上述两式可得:
P
G
=
(
A
1
G
T
)
(
B
1
A
1
T
)
P
B
1
=
(
A
2
G
T
)
(
B
2
A
2
T
)
P
B
2
=
P
G
P_G=(^{G}_{A1}T)(^{A1}_{B1}T)P_{B1}=(^{G}_{A2}T)(^{A2}_{B2}T)P_{B2}=P_G
PG=(A1GT)(B1A1T)PB1=(A2GT)(B2A2T)PB2=PG
由于认为激光雷达A与激光雷达B之间是刚性连接,所以二者之间的变换不随时间进行变化,即:
B
1
A
1
T
=
B
2
A
2
T
=
B
A
T
^{A1}_{B1}T=^{A2}_{B2}T=^{A}_{B}T
B1A1T=B2A2T=BAT
则上式变换为:
(
A
1
G
T
)
(
B
A
T
)
P
B
1
=
(
A
2
G
T
)
(
B
A
T
)
P
B
2
(^{G}_{A1}T)(^{A}_{B}T)P_{B1}=(^{G}_{A2}T)(^{A}_{B}T)P_{B2}
(A1GT)(BAT)PB1=(A2GT)(BAT)PB2
两边同左乘
(
A
2
G
T
)
−
1
(^{G}_{A2}T)^{-1}
(A2GT)−1,并同时右乘
(
P
B
1
)
−
1
(P_{B1})^{-1}
(PB1)−1,转换为下式:
(
A
2
G
T
)
−
1
(
A
1
G
T
)
(
B
A
T
)
=
(
B
A
T
)
P
B
2
(
P
B
1
)
−
1
(^{G}_{A2}T)^{-1}(^{G}_{A1}T)(^{A}_{B}T)=(^{A}_{B}T)P_{B2}(P_{B1})^{-1}
(A2GT)−1(A1GT)(BAT)=(BAT)PB2(PB1)−1
假设
(
B
A
T
)
(^{A}_{B}T)
(BAT)为要求解的变量
X
X
X,系数为
A
=
(
A
2
G
T
)
−
1
(
A
1
G
T
)
A=(^{G}_{A2}T)^{-1}(^{G}_{A1}T)
A=(A2GT)−1(A1GT)与
B
=
P
B
2
(
P
B
1
)
−
1
B=P_{B2}(P_{B1})^{-1}
B=PB2(PB1)−1。
则上式转换为:
A
X
=
X
B
AX=XB
AX=XB
这就是我们经常所说的手眼标定推导出的形式了。但是,这和我们的激光雷达轨迹有什么关系呢?
接着,对系数 A A A与 B B B分别进行转换,过程如下:
对式
A
A
A,代入
A
1
G
T
=
(
A
2
G
T
)
(
A
1
A
2
T
)
^{G}_{A1}T=(^{G}_{A2}T)(^{A2}_{A1}T)
A1GT=(A2GT)(A1A2T)得:
A
=
(
A
2
G
T
)
−
1
(
A
1
G
T
)
=
(
A
2
G
T
)
−
1
(
A
2
G
T
)
(
A
1
A
2
T
)
=
A
1
A
2
T
A=(^{G}_{A2}T)^{-1}(^{G}_{A1}T)=(^{G}_{A2}T)^{-1}(^{G}_{A2}T)(^{A2}_{A1}T)=^{A2}_{A1}T
A=(A2GT)−1(A1GT)=(A2GT)−1(A2GT)(A1A2T)=A1A2T
对式
B
B
B,分别代入
P
B
1
=
(
G
B
1
T
)
P
G
P_{B1}=(^{B1}_{G}T)P_{G}
PB1=(GB1T)PG与
P
B
2
=
(
G
B
2
T
)
P
G
P_{B2}=(^{B2}_{G}T)P_{G}
PB2=(GB2T)PG得:
B
=
P
B
2
(
P
B
1
)
−
1
=
(
G
B
2
T
)
P
G
(
G
B
1
T
P
G
)
−
1
B=P_{B2}(P_{B1})^{-1}=(^{B2}_{G}T)P_{G}(^{B1}_{G}TP_{G})^{-1}
B=PB2(PB1)−1=(GB2T)PG(GB1TPG)−1
=
(
G
B
2
T
)
P
G
P
G
−
1
(
G
B
1
T
)
−
1
=
(
G
B
2
T
)
(
G
B
1
T
)
−
1
=(^{B2}_{G}T)P_{G}P_{G}^{-1}(^{B1}_{G}T)^{-1}=(^{B2}_{G}T)(^{B1}_{G}T)^{-1}
=(GB2T)PGPG−1(GB1T)−1=(GB2T)(GB1T)−1
代入
G
B
2
T
=
(
B
1
B
2
T
)
(
G
B
1
T
)
^{B2}_{G}T=(^{B2}_{B1}T)(^{B1}_{G}T)
GB2T=(B1B2T)(GB1T)得:
B
=
(
G
B
2
T
)
(
G
B
1
T
)
−
1
=
(
B
1
B
2
T
)
(
G
B
1
T
)
(
G
B
1
T
)
−
1
=
B
1
B
2
T
B=(^{B2}_{G}T)(^{B1}_{G}T)^{-1}=(^{B2}_{B1}T)(^{B1}_{G}T)(^{B1}_{G}T)^{-1}=^{B2}_{B1}T
B=(GB2T)(GB1T)−1=(B1B2T)(GB1T)(GB1T)−1=B1B2T
由此,可得 A X = X B AX=XB AX=XB可以转换为下述形式:
( A 1 A 2 T ) X = X ( B 1 B 2 T ) (^{A2}_{A1}T)X=X(^{B2}_{B1}T) (A1A2T)X=X(B1B2T)
式中, A 1 A 2 T ^{A2}_{A1}T A1A2T为激光雷达 A A A从 t 1 t_1 t1时刻到 t 2 t_2 t2时刻的位姿变换(也就是轨迹)。同样的, B 1 B 2 T ^{B2}_{B1}T B1B2T为激光雷达 B B B从 t 1 t_1 t1时刻到 t 2 t_2 t2时刻的位姿变换。








![[抓包] 微信小程序(PC版)如何抓包](https://img-blog.csdnimg.cn/6750f80f67f1491abc75fb95e313c352.png)