本文为Windows配置点云库pcl步骤,具体win10、visual studio 2017、pcl1.11.1。
【1】下载安装包
Releases · PointCloudLibrary/pcl · GitHub
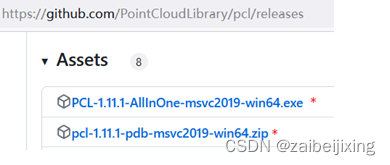
其中,AllInOne是一个包含了PCL库所有模块的单独下载包,方便快速获取整个PCL库,而pdb则是PCL库的调试信息文件,可以在程序崩溃时提供更详细的调试信息来分析解决错误。
【2】安装
2.1 先执行win64.exe
![]()
建议自定义安装的位置,按提示操作即可,建议把pcl添加到PATH中。

2.2 解压win64.zip

把解压出来的子文件,全部复制到PCL/bin中

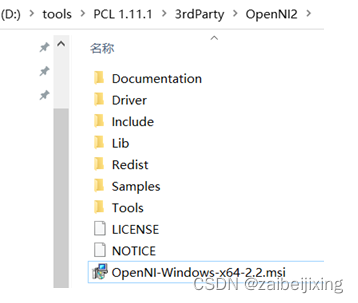
2.3 OpenNI2安装
执行.msi,建议修改路径到该文件夹下;如果已安装过,建议Remove后重新安装,以便后续添加PATH和使用时路径清晰。


安装完毕,该路径如下:
【3】设置环境变量
“此电脑”右键>>属性,如下图添加,再重启电脑:

【4】visual studio 项目实战
4.1 新建C++空项目
可设置Debug-x64

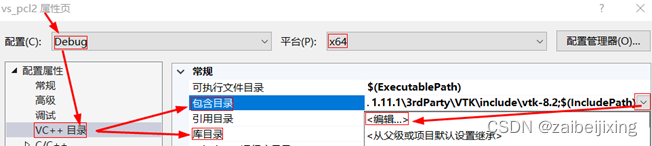
4.2 右键属性
如下图,右键 >> 属性

4.3 包含目录
如下图,编辑包含目录:
添加如下路径(不同库的路径层级不同,建议各层级都添加避免包含错误):
D:\tools\PCL 1.11.1\include\pcl-1.11
D:\tools\PCL 1.11.1\include\pcl-1.11\pcl
D:\tools\PCL 1.11.1\3rdParty\Boost\include\boost-1_74\boost
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3\Eigen
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3\unsupported
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3\unsupported\Eigen
D:\tools\PCL 1.11.1\3rdParty\FLANN\include
D:\tools\PCL 1.11.1\3rdParty\FLANN\include\flann
D:\tools\PCL 1.11.1\3rdParty\OpenNI2\Include
D:\tools\PCL 1.11.1\3rdParty\Qhull\include
D:\tools\PCL 1.11.1\3rdParty\Qhull\include\libqhull
D:\tools\PCL 1.11.1\3rdParty\Qhull\include\libqhull_r
D:\tools\PCL 1.11.1\3rdParty\Qhull\include\libqhullcpp
D:\tools\PCL 1.11.1\3rdParty\VTK\include
D:\tools\PCL 1.11.1\3rdParty\VTK\include\vtk-8.2
4.4 库目录
仿照4.3包含目录添加库目录:
D:\tools\PCL 1.11.1\lib
D:\tools\PCL 1.11.1\3rdParty\Boost\lib
D:\tools\PCL 1.11.1\3rdParty\FLANN\lib
D:\tools\PCL 1.11.1\3rdParty\OpenNI2\Lib
D:\tools\PCL 1.11.1\3rdParty\Qhull\lib
D:\tools\PCL 1.11.1\3rdParty\VTK\lib
4.5 添加附加依赖项
需要添加PCL和VTK的debug版lib,总共140多个。
可以通过以下批处理的方法:
cd\d D:\tools\PCL 1.11.1\lib //转到lib目录
dir/b *d.lib *>0.txt //把debug用的d.lib后缀名字写到0.txt中
两次操作把这些名字复制粘贴到附加依赖项中。

4.6 添加.cpp并执行
#include <iostream>
#include <thread>
#include <pcl/console/parse.h>
#include <pcl/point_cloud.h> // for PointCloud
#include <pcl/common/io.h> // for copyPointCloud
#include <pcl/point_types.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/sample_consensus/sac_model_sphere.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std::chrono_literals;
pcl::visualization::PCLVisualizer::Ptr
simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
//viewer->addCoordinateSystem (1.0, "global");
viewer->initCameraParameters();
return (viewer);
}
int
main(int argc, char** argv)
{
// initialize PointClouds
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>);
// populate our PointCloud with points
cloud->width = 500;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
for (pcl::index_t i = 0; i < static_cast<pcl::index_t>(cloud->size()); ++i)
{
if (pcl::console::find_argument(argc, argv, "-s") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)
{
(*cloud)[i].x = 1024 * rand() / (RAND_MAX + 1.0);
(*cloud)[i].y = 1024 * rand() / (RAND_MAX + 1.0);
if (i % 5 == 0)
(*cloud)[i].z = 1024 * rand() / (RAND_MAX + 1.0);
else if (i % 2 == 0)
(*cloud)[i].z = sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x)
- ((*cloud)[i].y * (*cloud)[i].y));
else
(*cloud)[i].z = -sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x)
- ((*cloud)[i].y * (*cloud)[i].y));
}
else
{
(*cloud)[i].x = 1024 * rand() / (RAND_MAX + 1.0);
(*cloud)[i].y = 1024 * rand() / (RAND_MAX + 1.0);
if (i % 2 == 0)
(*cloud)[i].z = 1024 * rand() / (RAND_MAX + 1.0);
else
(*cloud)[i].z = -1 * ((*cloud)[i].x + (*cloud)[i].y);
}
}
std::vector<int> inliers;
// created RandomSampleConsensus object and compute the appropriated model
pcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptr
model_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ>(cloud));
pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptr
model_p(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));
if (pcl::console::find_argument(argc, argv, "-f") >= 0)
{
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_p);
ransac.setDistanceThreshold(.01);
ransac.computeModel();
ransac.getInliers(inliers);
}
else if (pcl::console::find_argument(argc, argv, "-sf") >= 0)
{
pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_s);
ransac.setDistanceThreshold(.01);
ransac.computeModel();
ransac.getInliers(inliers);
}
// copies all inliers of the model computed to another PointCloud
pcl::copyPointCloud(*cloud, inliers, *final);
// creates the visualization object and adds either our original cloud or all of the inliers
// depending on the command line arguments specified.
pcl::visualization::PCLVisualizer::Ptr viewer;
if (pcl::console::find_argument(argc, argv, "-f") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)
viewer = simpleVis(final);
else
viewer = simpleVis(cloud);
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
std::this_thread::sleep_for(100ms);
}
return 0;
}执行结果:
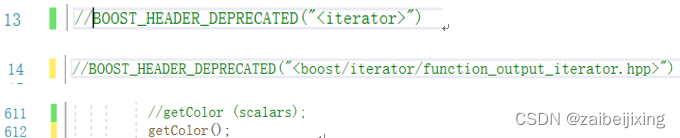
另:执行可能出现的代码错误解决方法

有两种解决方法:
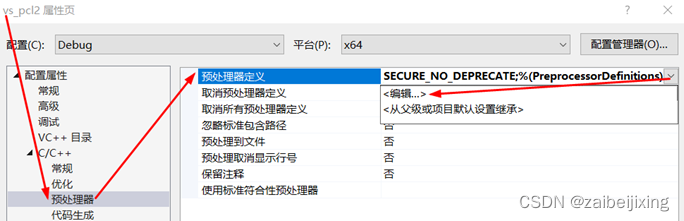
1、直接跳转到该位置注释;
2、或在预编译器添加 _CRT_SECURE_NO_DEPRECATE
注:部分地方参考:
PCL学习笔记(一)-- Windows下配置安装PCL开发环境_pcl环境配置_看到我请叫我学C++的博客-CSDN博客