Simcenter Prescan是基于物理学的最佳仿真平台,在桌面、集群和云端,用于智能驾驶车辆开发,于2022年三月宣布发布2022.1版本。Simcenter Prescan 2022.1引入了与SUMO的协同仿真,用于自动生成交通,并配有程序化的脚本,使用户能够快速定义具有(可控)随机性和变化的测试场景,以验证自动驾驶车辆。Simcenter基于物理的雷达(PBR)现在包括行人,支持Linux。基于物理学的Prescan激光雷达传感器模型已得到进一步改进,以帮助用户提高AV/ADAS仿真的准确性和易用性。

-
带有智能交通的程序化世界生成
变化是开发和测试AV系统的关键。Simcenter Prescan现在配备了程序性世界生成脚本,它可以综合地生成随机变化的世界。与SUMO插件的新智能交通生成相结合,现在可以在不断变化的环境中对AV进行实际的广泛测试。
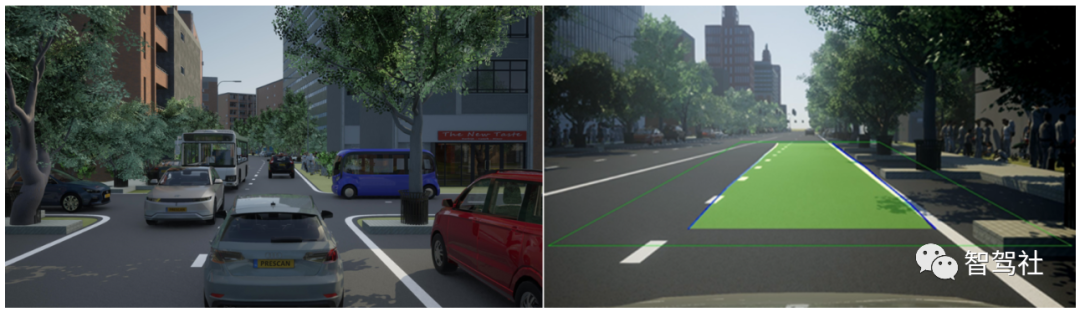
智能驾驶汽车开发的程序化世界创建
-
支持ASAM OpenX
标准化和互操作性是必须的。协同模拟或将任何AV堆栈连接到Simcenter Prescan从未像现在这样简单,通过这个版本,可以用Simcenter Prescan创建符合要求的OpenDRIVE文件。这个版本还引入了openScenario文件的目录,以及外部控制器。这些额外的功能使Simcenter Prescan中对OpenX标准的支持达到了一个非常成熟的水平。用户能够在其虚拟验证设置中导入并使用大量的openDrive和openScenario文件。
-
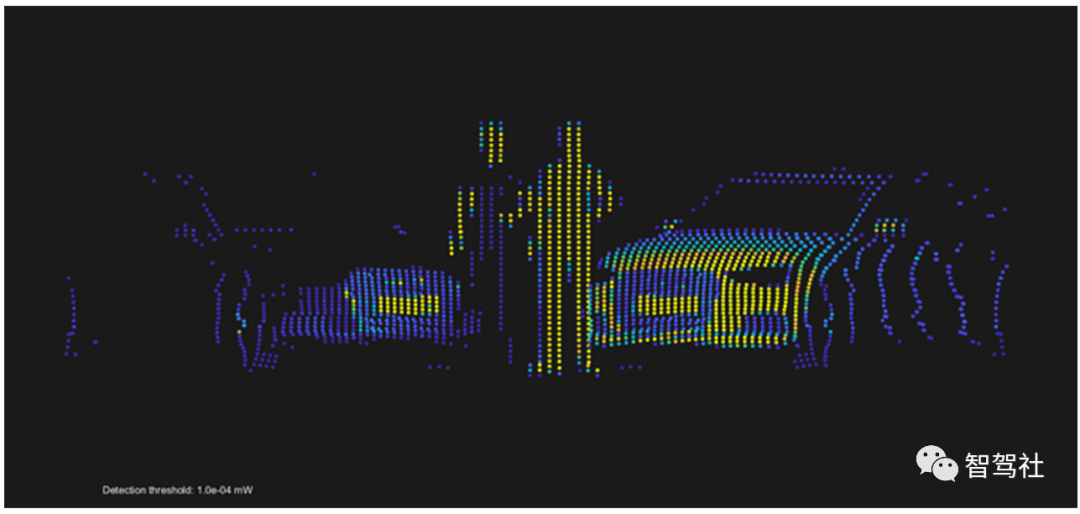
基于物理学的传感器仿真的行人支持
在这个版本中,基于物理的毫米波雷达支持行人的动画。这意味着PBR的输出将显示与这些行为者的运动有关的信息,例如微多普勒效应。另外,基于物理的毫米波雷达现在也可用于Linux系统。
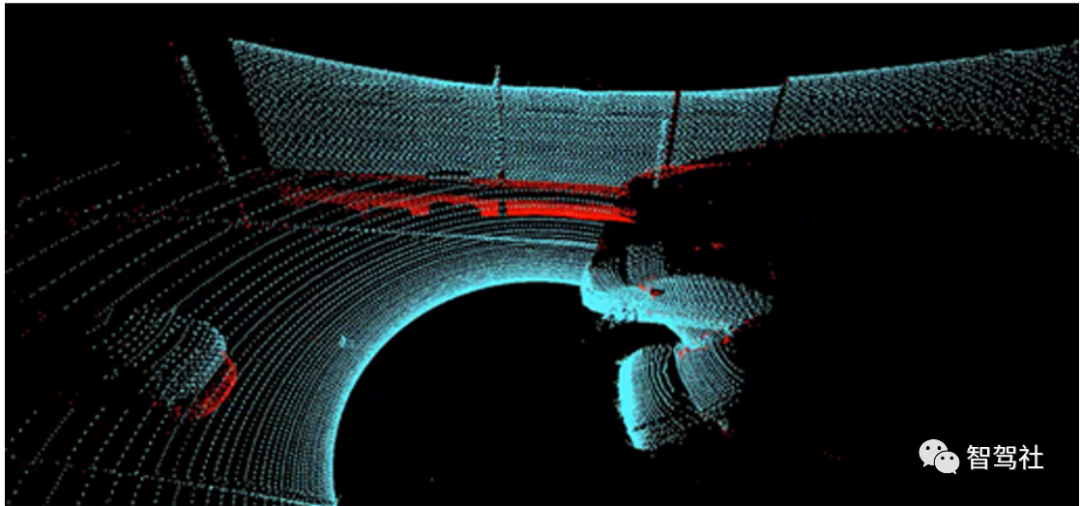
基于物理学的激光雷达模拟用于自主车辆的开发和验证
基于物理学的激光雷达仿真用于自主车辆的开发和验证
Simcenter Prescan 2022.1为基于物理的激光雷达传感器带来了令人兴奋的更新。Prescan仿真由于目标的颜色变化而返回到激光雷达的能量,从而准确地仿真对感知算法性能的影响。此外,基于物理学的激光雷达的点云输出现在可以在观测器屏幕上以注释的形式进行可视化。
-
V2X插件的用户定义消息
今天可以在Prescan内定义自己的二进制消息,如ASN.1消息。V2X HiL可以通过C++或Matlab Simulink轻松连接。
-
基于物理学的规模化仿真
在这个新版本中,点云激光雷达(基于物理的激光雷达)作为一个测试版在Azure云中得到了支持。Prescan用户现在能够使用相同的解决方案和集群/云环境,大规模地进行高保真仿真。客户还可以从更快的云端部署中受益,并在此版本中使用无监督学习对大型结果集进行分析和消化的文件指导。
在集群和云环境中基于物理学的激光雷达仿真,用于测试和验证数十亿场景中的自动驾驶车辆
-
Simcenter Prescan - Simcenter Amesim车辆动力学
Simcenter Prescan包括集成的Simcenter Amesim模型,用于高保真的车辆动力学仿真。预配置的模型包含在Prescan基本产品中,而原型模型需要额外的Simcenter Amesim运行时间许可证。原型模型提供了对A级、C级(前轮驱动)车辆、SUV(全轮驱动)和非铰接式卡车(后轮驱动)建模的选择。预配置模型使用户能够仿真ADAS和AV系统的设计和验证用例,而原型模型则通过高保真的可定制的车辆动力学仿真实现ADAS和AV案例的测试和验证。
-
新的数据库
Simcenter Prescan有一个广泛的数据库,根据客户要求定期更新。现代IONIQ和日野蓝带客车已被添加到Simcenter Prescan车辆库中。一些新的建筑模型已被添加到城市建模中,以丰富城市建模体验。此外,基础设施对象(如水泥护栏、吸音墙、栅栏等)已被纳入,为传感器感知系统的性能和准确性测试提供了额外的变化。
-
新的例子
EuroNCAP协议为ADAS系统的测试和验证提供了一个重要基准。Simcenter Prescan 2022.1包括具有自动报告功能的ENCAP自动紧急制动(AEB)场景套件,使我们的客户能够根据ENCAP协议场景验证其ADAS系统。这些场景可在Matlab以及Python中使用。该测试套件还包括一个旨在避免纵向碰撞的安全辅助系统的例子。
目前PreScan2022.06已经可以正常个人使用,
通过百度网盘分享的文件:2022
链接:https://pan.baidu.com/s/1RbjJJTQAdswvHI-gyOiMTQ?pwd=a5kP
提取码:a5kP
复制这段内容打开「百度网盘APP 即可获取」。