原创 | 文BFT机器人

引言
Introduction
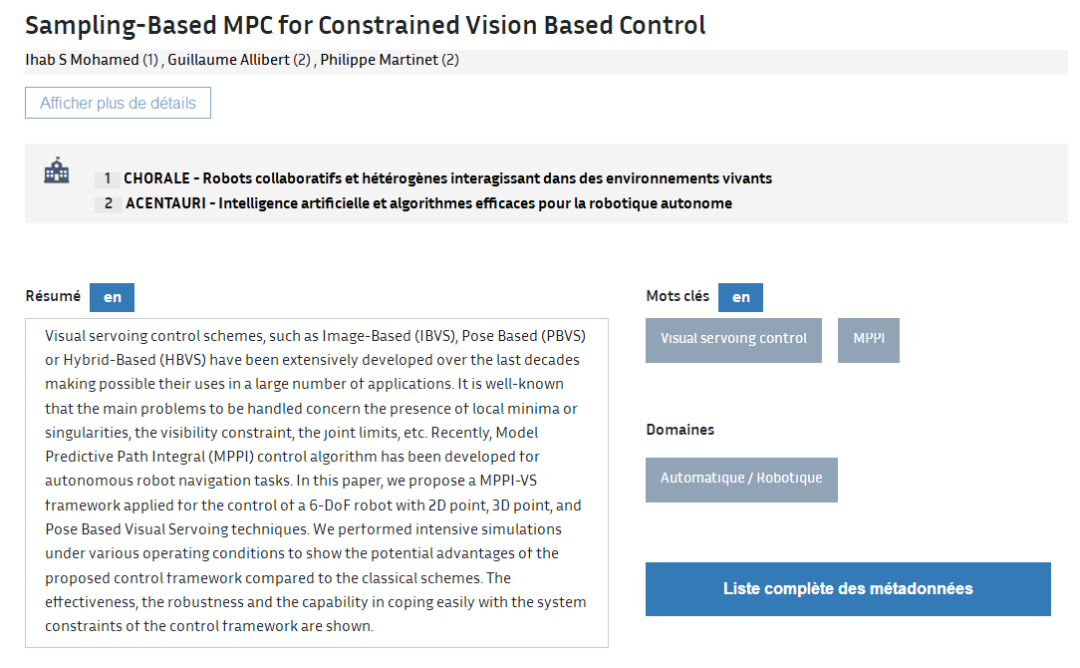
视觉伺服控制方案,如基于图像的(IBVS),基于姿态的(PBVS)或基于混合的(HBVS),在过去的几十年里得到了广泛的发展。众所周知,要处理的主要问题涉及局部极小点或奇异点的存在、可见性约束、联合极限等。近年来,模型预测路径积分(MPPI)控制算法被开发用于自主机器人导航任务。
论文地址:https://inria.hal.science/lirmm-03313645v1
该论文提出了一种基于多尺度Laplacian描述符和FMM的形状控制方法,用于多机器人操作大变形可变形物体,主要介绍了形状控制作为一个重要的研究领域,能够在许多应用中实现任务自动化。
然而,通过使用少量夹爪将物体变形为所需的目标形状是一个重大挑战。物体动力学信息有限、需要结合小范围和大范围的变形以实现特定的目标形状,以及大多数可变形物体的非线性特性都会显著影响形状控制的性能。
为解决这些问题,该论文提出了一种用于多机器人操作大变形可变形物体的形状控制方法。该方法基于多尺度Laplacian描述符,并利用FMM(快速行进法)进行弹性形状轮廓匹配。FMM生成的路径和Laplacian算子被用于定义机器人夹爪的控制策略。通过使用ARAP(尽可能刚性)变形模型进行仿真实验,该方法取得了令人满意的结果。
01
经典视觉伺服控制方案
介绍了视觉伺服控制的基本概念和目标,即通过视觉反馈实现对目标物体的精确控制,并对不同类型的视觉特征进行了分类和描述,包括二维图像点特征、三维点特征和姿态特征。
在每个特征类型下,章节详细介绍了相关的控制技术。这些技术基于建立一个交互矩阵来描述传感器特征与环境之间的相对速度演变关系。目标是通过最小化当前视觉特征与期望特征之间的误差来实现控制。
作者总结了传统的视觉伺服控制技术。这些技术基于建立一个交互矩阵 Ls,用于描述传感器特征与传感器和环境之间的相对速度的演化关系。所有基于视觉的控制方案的主要目标是最小化当前视觉特征 s(t) 与期望特征 s∗ 之间的误差 e(t),通常定义为 e(t) = s(t) – s*。通过对误差施加指数级的减小(即 ˙e(t) = -λs ·e(t)),并考虑到机器人手上的相机,可以利用这些误差进行控制。
对于二维图像点特征,介绍了基于图像投影的方法,通过对图像中的点进行追踪和控制实现目标物体的定位和跟踪。对于三维点特征,讨论了基于三维点云信息的控制方法,其中使用传感器获取物体的三维点云数据,并通过控制机器人使得特定点在三维空间中达到期望位置。对于姿态特征,介绍了基于物体姿态的控制方法,即通过控制物体的旋转和姿态实现精确的控制。
此外,该章还讨论了经典视觉伺服控制方案的局限性和挑战,例如传感器噪声、模型不确定性和控制非线性等问题。最后,总结了每种控制方案的优点和适用性,并提出了未来研究的方向。
小结:
这一章介绍了经典的视觉伺服控制方案,为后续章节中提出的基于采样的模型预测控制方法奠定了基础。这一章为我们读者提供了对传统视觉伺服控制技术的理解和背景,并为后续章节的内容铺垫。
02
提出的基于采样的MPC视觉伺服控制框架
2.1.提出了一种基于采样的MPC方法来解决受约束视觉伺服控制中的问题。
与传统的在线优化方法相比,采样MPC方法能提供更低的计算负担和较短的计算时间,使其更适用于实时应用。
2.2 通过采样轨迹的生成和统计信息的分析,采样MPC方法能够处理系统的不确定性和约束要求。
这使得该方法在应对现实世界中的不确定性和复杂约束时更具鲁棒性。采样MPC方法是一种无需求解逆矩阵的控制方法,直接使用近似的交互矩阵进行控制,避免了实时估计和计算逆矩阵的复杂性。实验结果证明了采样MPC方法在受约束视觉伺服控制中的有效性和可行性,为基于采样的控制方法在视觉伺服领域的应用提供了新的思路和方法。
小结:
该论文提出了一种基于采样的MPC方法,并在受约束视觉伺服控制的背景下进行了研究和验证。通过实验结果的支持,该方法在控制性能、计算效率和鲁棒性方面具有显著的优势,为解决视觉伺服控制中的挑战性问题提供了一种新的解决方案。未来的工作可以在实际机器人系统上进行验证,并进一步探索和改进基于采样的MPC方法在视觉伺服控制中的方法。
03
实验结果
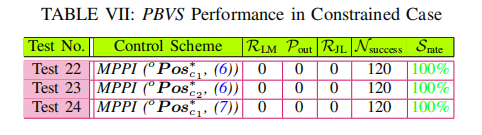
论文通过在仿真环境中进行实验验证了所提出方法的有效性。
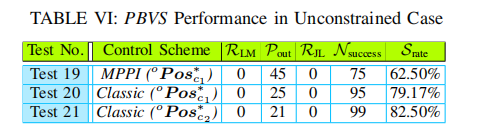
实验结果表明,采样MPC方法能够在受约束视觉伺服控制中实现较好的控制性能和约束满足能力。与传统的在线优化方法相比,采样MPC方法具有较低的计算负担和较短的计算时间,同时能够处理系统不确定性和约束要求。

在仿真环境中实验
04
总结
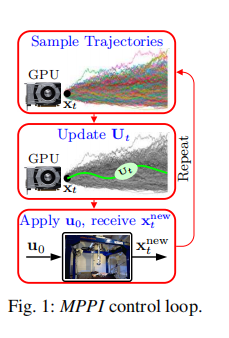
在本文中,论文作者提出了一种实时的基于采样的模型预测控制方法,该方法通过在每个时间步长上生成一组采样轨迹,并使用这些轨迹来估计系统在未来时间内的状态和性能。
然后,通过优化问题来选择最优的控制输入序列,以使系统在未来的一段时间内满足约束条件并最小化性能指标。采样轨迹的生成是通过从系统模型中采样控制输入来实现的,并根据随机扰动来模拟系统的不确定性。最后,根据采样轨迹的统计信息,计算出最优控制输入序列。
该方法用于预测视觉伺服系统的未来行为,而无需解决在线优化问题,这通常超出实际系统采样时间并且计算负担较大。无需实时估计交互矩阵的逆矩阵或进行伪逆运算。所提出的方法直接使用近似的交互矩阵,即一种无需求解逆矩阵的控制方法。可轻松处理可见性、三维(即3D)和控制约束以及参数不确定性。他们下一步的工作将是在实际笛卡尔机器人上进行验证。
来自 IROS 2021
网址:https://hal.inria.fr/lirmm-03313645v1
标题:Sampling-Based MPC for Constrained Vision Based Control
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。