ZED立体相机再现了人类双目视觉的工作方式。通过比较左眼和右眼看到的两种视图,不仅可以推断深度,还可以推断空间中的3D运动。
ZED立体相机可以捕捉到场景的高分辨率3D视频,通过比较左右图像之间的像素位移可以估计深度和运动。
深度感知
深度感知是指确定物体之间的距离,以三维的角度看世界。到目前为止,深度传感器仅限于近距离和室内的深度感知,限制了其在手势控制和身体跟踪方面的应用。ZED是第一个使用立体视觉的通用深度传感器:
深度可以达到20米;
深度捕捉的帧率可以达到100FPS;
视野可以达到110度(H)x70度(V);
可以在室内和室外工作。
深度图
ZED捕获的深度图为图像中的每个像素(X,Y)存储距离值(Z)。距离以公制单位表示(例如米),并计算从相机左镜头后到场景对象的距离。
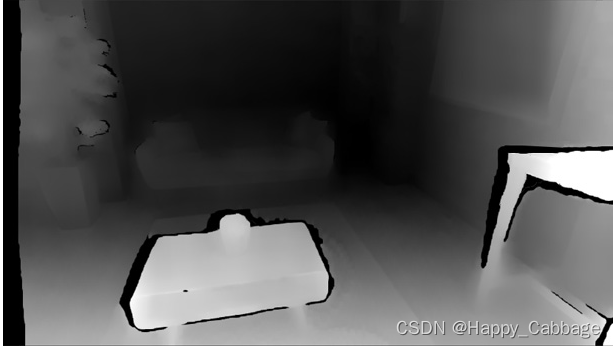
因为深度图是32位编码的所以不能直接显示。要显示灰度图,可以用在[0,255]之间的8位单色(灰度)值表示,255表示最近的深度近似值,0表示最远的深度近似值。
3D点云
另一种表示深度信息的常用方法是3D点云。点云可以看作是三维的深度图。深度图只包含每个像素的距离或Z信息,而点云代表场景外表面的3D点(X,Y,Z)的集合,可以包含颜色信息。

一、深度设置
ZED SDK提供了两种深度感知模式:STANDARD和FILL。
1、STANDARD模式
STANDARD模式是ZED的默认深度感知模式。该模式保存了距离测量和形状,运行速度比FILL模式快,但是由于视觉遮挡和过滤,它会包含孔洞。这些洞在深度图中用黑色区域表示。使用STANDARD模式的应用包括自主导航,障碍物检测,3D地图,人员检测和跟踪。
在STANDARD模式下,孔洞(黑色像素)根据其类型有不同的值:
NAN 称为OCCLUSION_VALUE。像素的深度无法估计,因为被遮挡或者是异常值。
-INFINITY 称为TOO_CLOSE。像素的深度无法估计,因为太靠近相机。
INFINITY 称为TOO_FAR。像素的深度无法估计,因为离相机太远了。
可以用isValidMeasure()检查有效的深度值。
2、FILL模式
FILL模式为左侧图像中的每个像素(X,Y)提供了一个具有Z值的完全密集深度图。FILL模式填充深度图中的孔洞和遮挡,并添加了一个过滤阶段,能够提高边缘和时间稳定性,但会改变场景中物体的实际距离。
该模式推荐应用于混合现实捕获和视觉效果等。FILL模式比STANDARD模式需要更多的资源,并且以更低的FPS运行。
如果要将深度感知设置为FILL模式,在“RuntimeParameters”中设置“SENSING_MODE_FILL"。
# Set depth mode in ULTRA
init_parameters = sl.InitParameters()
init_parameters.depth_mode = sl.DEPTH_MODE.ULTRA二、深度模式
这些设置可以调整精度水平,范围和深度传感模块的计算性能。从更好到更快的排列如下:
NEURAL:通过AI技术把深度感知提升到了一个新的水平。即使在最具有挑战性的情况下也是准确和平稳的。
ULTRA:为基于计算机视觉的技术提供了最高的深度范围和更好的Z精度。
QUALITY:具有使表面光滑的强大的过滤阶段。
PERFORMANCE:设计得很光滑,可能会漏掉一些细节。
一般来说,建议对桌面和嵌入式应用都使用ULTRA模式。如果应用需要大量资源,切换到PERFORMANCE模式。
# Set depth mode in ULTRA
init_parameters = sl.InitParameters()
init_parameters.depth_mode = sl.DEPTH_MODE.ULTRA三、深度范围
深度范围对应于可以估计物体深度的最小和最大距离。
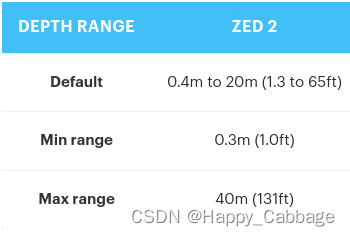
1、最小范围
最小范围可以使用InitParameters中的depth_minimum_distance设置从默认值降低。
init_params = sl.InitParameters()
init_parameters.coordinate_units = sl.UNIT.METER
init_parameters.depth_minimum_distance = 0.15 # Set the minimum depth perception distance to 15cm将最小范围降低到非常小的值可以显著增加内存需求并降低FPS。增加这个值可以提高性能。
对于需要远距离深度感知的应用,建议将depth_minimum_distancee设置为1m或更大以提高性能。
2、最大范围
最大范围可以用sl.InitParameters中的depth_maximum_distance增加。
init_params = sl.InitParameters()
init_parameters.depth_mode = sl.DEPTH_MODE.ULTRA # Set the depth mode to ULTRA
init_parameters.coordinate_units = UNIT.METER
init_parameters.depth_maximum_distance = 40 # Set the maximum depth perception distance to 40m建议使用ULTRA深度模式来提高远距离的深度精度。
最大深度范围一定程度上可以缩小到一定距离以上的钳制值,这对于减少远距离的深度抖动很有用。
增大最大范围对内存和FPS没有影响。
四、深度稳定
深度稳定是一种暂时融合和过滤几帧深度图的功能。这样可以减少抖动并提高静态对象的深度精度。即使当相机是通过使用ZED SDK的位置跟踪能力移动时,深度稳定也在运行。它还可以检测运动物体,以避免融合动态区域的深度。
默认情况下,深度稳定是启用的。由于它在后台启用位置跟踪,可以使用init_parameters.depth_stabilization = false来禁用深度稳定,以提高计算性能。
对于固定相机,建议在使用深度稳定时启用PositionalTrackingParameters::set_as_static。这可以让深度稳定模块知道相机是静态的,因此它可以禁用视觉跟踪并减少计算负载。
五、深度准确性
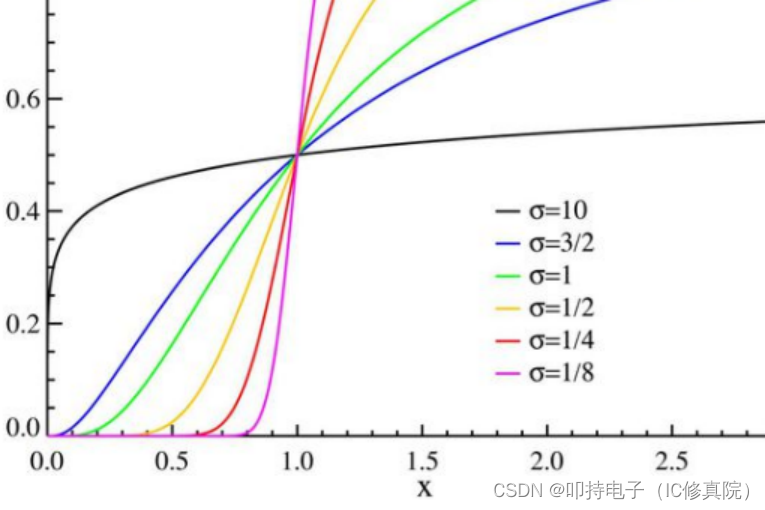
立体视觉使用三角测量从视差图像中估计深度,下面的公式描述了深度分辨率在立体相机范围内的变化情况:
Dr=Z^2*alpha,其中Dr为深度分辨率,Z为距离,alpha为常数。
深度精度随z-距离呈二次递减,近距离立体深度精度为距离的1%,远距离立体深度精度为距离的9%。在均匀和无纹理表面(如白墙、绿色屏幕和镜面区域)上的异常值测量也会影响深度精度。这些表面通常在深度测量中产生暂时的不稳定。
六、最佳实践
所有来自Stereolabs的相机都可以在室内和室外远距离(可达20米)使用。提供最佳深度精度的配置是将相机放置在距离场景30厘米至1米的工作距离处。要捕捉快速运动,请使用相机的高速模式(HD720 @ 60 FPS或VGA @ 100 FPS)。
避免在光线非常弱的环境中使用相机,因为相机使用彩色图像进行深度感知。但是可以通过将相机帧速率降低到15FPS来改善弱光性能。
可以使用USB 3.0扩展线将USB线的距离扩展到15m,使用光纤USB 3.0扩展器将USB线缆的距扩展到100m。