Trajectory Prediction of Preceding Target Vehicles Based on Lane Crossing and Final Points Generation Model Considering Driving Styles
- 导读
- II.问题表述与系统架构
- A. Trajectory Prediction for PTVs(preceding target vehicles)
- B. Position and Time to Lane Crossing Prediction
- C. System Architecture
- III. LAND CROSSING AND FINAL POINTS GENERATION
- A. Lane Crossing Point Prediction
- B. Final Point Prediction for Lane Change
- C. Trajectory Prediction for Lane Keeping
- IV. MANEUVER AND STAGE RECOGNITION AND TRAJECTORY PREDICTION
- A. Maneuver and Stage Recognition
- B. Trajectory Prediction Using Curve Fitting
- V. EXPERIMENT AND RESULT ANALYSIS
- A. Driving Data Collection
- B. Maneuver and Stage Recognition Result
- C. Trajectory Prediction Results and Analysis
- VI. CONCLUSION
Based on Lane Crossing and Final Points Generation
Model Considering Driving Styles)
导读
因为这是一篇比较偏模型的论文,而且数据集也不公开,所以不会读的特别仔细,先看的实验和总结部分了解本文做了啥,然后挑能看懂的模型部分看(小标题都写了,但内容不一定有,可以看你感兴趣的地方然后在原文中补充了解),公式太多让人缺乏细看的兴致,如果自己做的方向是这边的话也许可以细看一下。需要论文资源的可以搜名字,也可以私信我,堕落了好多天,觉醒吧少年!
II.问题表述与系统架构
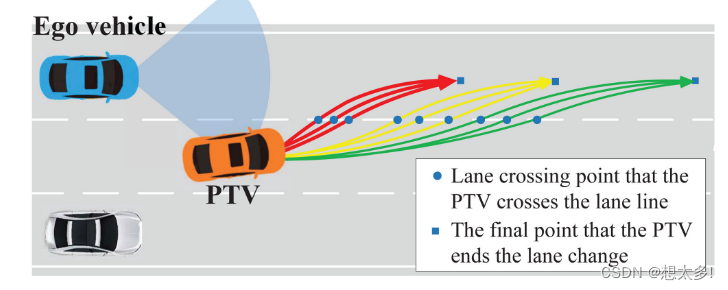
在执行换道时,前一目标车辆(PTV)的可能轨迹。 通过车道交叉点和结束换道的最终点可以有效地确定未来的轨迹。
A. Trajectory Prediction for PTVs(preceding target vehicles)

环境和车辆信息的标记,我们的方法的目标是预测前一个目标车辆在下一个tf 秒内的未来位置。
B. Position and Time to Lane Crossing Prediction
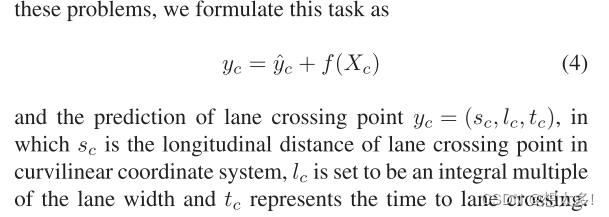
我们采用深度条件生成模型(CGM),假设位置和时间服从高斯混合分布,输出车道交叉位置和时间的条件概率分布。
C. System Architecture
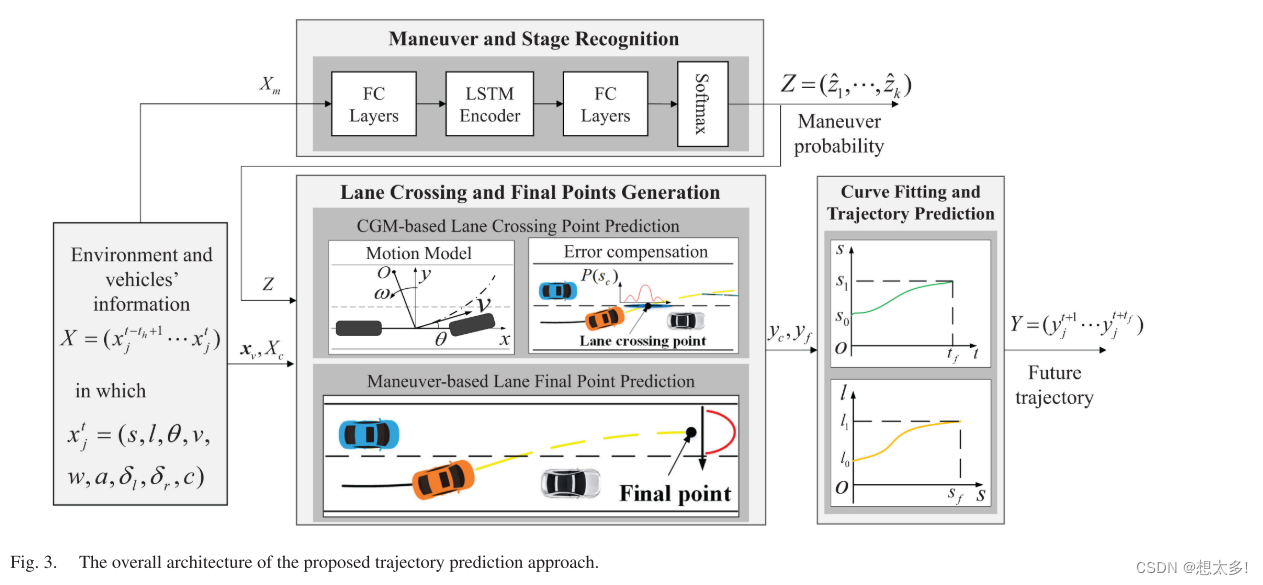
图 3给出了所提出的弹道预测方法的完整体系结构。该系统分为三个相互影响的部分:
机动与阶段识别、车道交叉与终点生成、曲线拟合与轨迹预测。
车道交叉和终点生成是整个系统中最关键的部分,包括基于CGM的车道交叉点预测和基于机动的车道终点预测。 该模块主要侧重于预测两个点:车道交叉点YC和最终点YF,采用正弦函数模型进行长期预测。
III. LAND CROSSING AND FINAL POINTS GENERATION
A. Lane Crossing Point Prediction
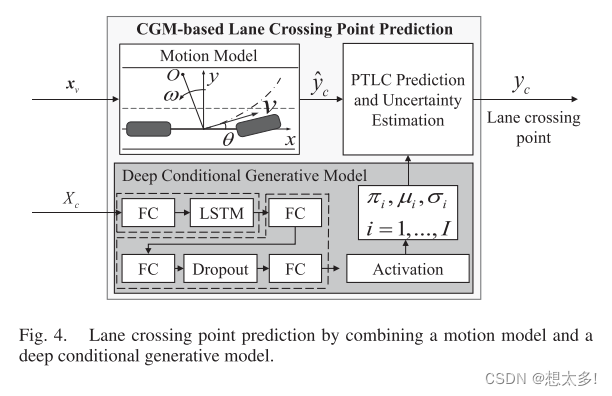
在前面的目标车辆正在进行变道机动的前提下,首先利用运动模型估计到车道交叉点的位置和时间。 补偿部分以从深层条件生成模型得到的条件概率分布的形式表示。 整个过程以图4为例 .
-
Motion Model: 式(4) 的第一项
-
深层条件生成模型:式(4) 的第第二项
B. Final Point Prediction for Lane Change
当前一目标车辆的机动被识别为换道时,我们采用半周期的SIN函数作为机动模型来预测曲线坐标中的终点
C. Trajectory Prediction for Lane Keeping
当前面的目标车辆的行为是车道保持时,根据初始状态信息和道路信息,基于恒定加速度(CA)模型进行纵向轨迹预测
IV. MANEUVER AND STAGE RECOGNITION AND TRAJECTORY PREDICTION
A. Maneuver and Stage Recognition
B. Trajectory Prediction Using Curve Fitting
V. EXPERIMENT AND RESULT ANALYSIS
A. Driving Data Collection
本文的数据是自己从上海的道路上收集的,如图6所示
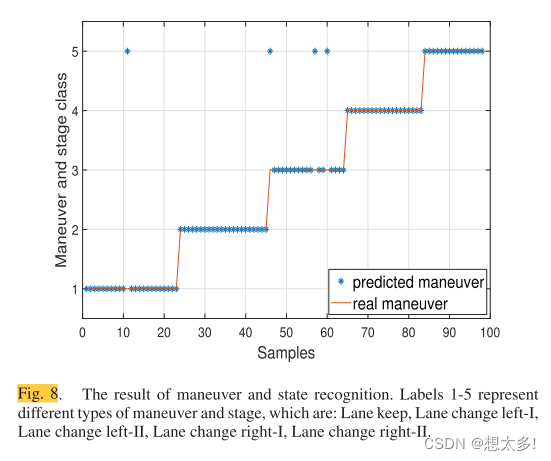
B. Maneuver and Stage Recognition Result
机动和状态识别的结果如图8所示,显示100条测试结果。标签1-5代表不同类型的机动和阶段,它们是:车道保持,左变道-I,左变道-II,右变道-I,右变道-II。
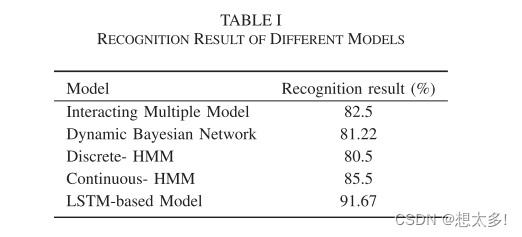
表I说明本文提出的模型精确度高于其它模型,达到了91.76%
C. Trajectory Prediction Results and Analysis
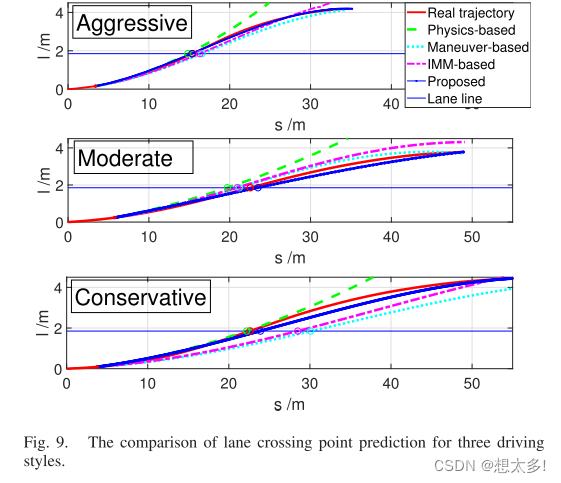
图9给出了三种不同驾驶方式下采用不同方法预测车道交叉点位置的结果。 结果表明,该方法能够准确预测不同行驶方式下的交叉点,有利于轨迹的准确预测。
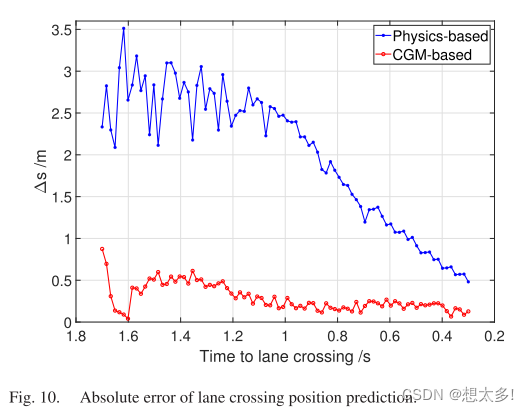
图10示当车辆执行变道并随着时间的推移越来越接近车道线时,预测的过道位置与地面真实值之间的绝对误差。 可以看出,经过CGM模型补偿后,位置预测的精度有所提高。
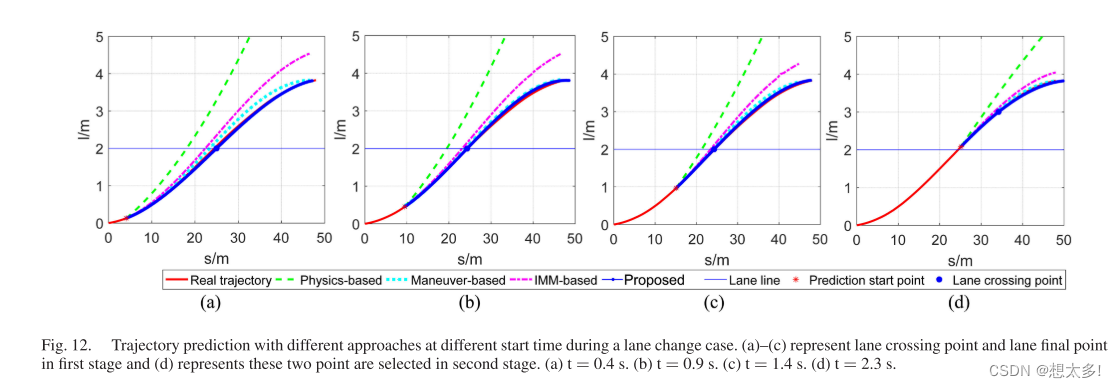
如图12所示 ,在车道改变的情况下,在不同的预测起始时刻,比较了不同方法的轨迹预测结果。预测的轨迹非常稳定和准确。
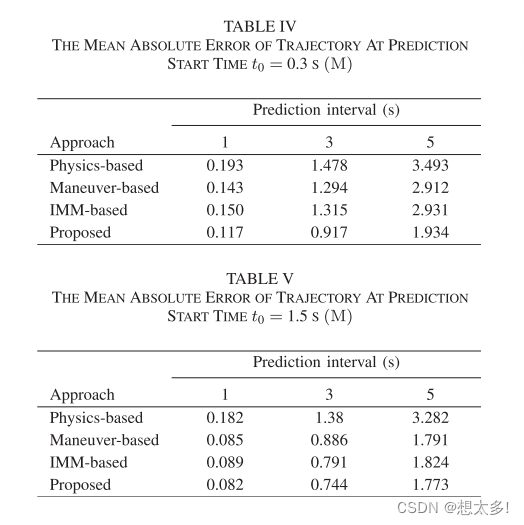
预测起始时刻t0=0.3s(M)&t0=1.5s(M)的弹道平均绝对误差如表IV & V 所示,可以看出,在这两种情况下,所提出的方法在1s~5s的预测间隔内达到了比其他方法更高的精度。 特别是在长期预测中,我们提出的方法的MAE保持在1.934m以下。
VI. CONCLUSION
本文提出了一种基于车道交叉和最终点生成(CFPG)模型的前车轨迹预测方法,以获得未来目标车辆的精确位置。 我们设计了一个基于LSTM的模型来识别PTV的机动和阶段。 然后采用基于CGM的方法对车道交叉点进行预测,该方法将基于物理的模型与深度条件生成模型相结合。 这种组合考虑了历史轨迹信息和PTV的潜在驾驶风格。 此外,通过基于机动的模型对最终点进行了预测,并使用基于车道中心线的正态分布来考虑其不确定性。 最后采用曲线拟合法得到预测轨迹。







![[附源码]计算机毕业设计JAVA校园兼职招聘系统](https://img-blog.csdnimg.cn/07929741d6f041f28a23d166c30ec0d3.png)