目录
1:hashtable.h
2:unordered_map.h
3:unordered_set
4:讲解
1:hashtable.h
#pragma once
#include<vector>
using namespace std;
namespace OpenAdress
{
enum State
{
EXIST,
DELETE,
EMPTY,
};
template<class K,class V>
struct HashData
{
pair<K, V> _kv;
State _state = EMPTY;
};
template<class K, class V>
class HashTable
{
public:
bool Insert(const pair<K, V>& kv)
{
if (Find(kv.first))
{
return false;
}
if (_tables.size() == 0 || (_n * 10 / _tables.size()) >= 7)
{
size_t newsize = _tables.size() == 0 ? 10 : _tables.size() * 2;
HashTable<K, V> _newht;
_newht._tables.resize(newsize);//必须开新表,不能直接写,否则映射关系改变
for (auto& data : _tables)
{
_newht.Insert(data._kv);
}
_tables.swap(_newht._tables);
}
size_t hashi = kv.first % _tables.size();
size_t i = 1;
size_t index = hashi;
while (_tables[index]._state == EXIST)//3 13 23 33删除23 如果判断
{
index = hashi + i;
index %= _tables.size();
++i;
}
_tables[index]._kv = kv;
_tables[index]._state = EXIST;
++_n;
return true;
}
HashData<K, V>* Find(const K& key)
{
if (_tables.size() == 0)
{
return nullptr;
}
size_t hashi =key % _tables.size();
//等于删除也往后找,防止有时候查找数据还删数据,如果判断为非存在就有问题了,过不去后面的数据
size_t i = 1;
size_t index = hashi;
while (_tables[index]._state != EMPTY)
{
if (_tables[index]._kv.first == key
&& _tables[index]._state == EXIST)//如果已经删了再找就找不到了
{
return &_tables[index];
}
index = i + hashi;
index %= _tables.size();
++i;
if (index == hashi)//找了一圈,全是存在和删除
{
break;
}
}
//有两可能,一个是index==hashi,找了一圈全是存在和删除,还有一种可能是一开始index=hashi的时候后面就没有数据了。
return nullptr;
}
bool Erase(const K& key)
{
HashData<K, V>* k = Find(key);
if (k)
{
k->_state = DELETE;
--_n;
return true;
}
else
{
return false;
}
}
private:
vector<HashData<K, V>> _tables;
size_t _n = 0;
};
}
namespace HashBucket
{
template<class T>
struct HashNode
{
HashNode<T>* _next;
T _data;
HashNode(const T& data)
:_data(data)
,_next(nullptr){}
};
template<class K, class V, class keyoft>
class HashTable;
template<class K, class T, class Ptr, class Ref, class keyoft>
class _HashIterator
{
public:
typedef HashNode<T> Node;
typedef HashTable<K, T, keyoft> HT;
typedef _HashIterator<K, T, Ptr, Ref, keyoft> Self;
typedef _HashIterator<K, T, T*, T&, keyoft> iterator;
Node* _node;
HT* _ht;
_HashIterator(Node* node,HT* ht)
:_node(node)
,_ht(ht){}
_HashIterator(const iterator& it)
:_node(it._node)
,_ht(it._ht){}
Ref operator*()
{
return _node->_data;
}
Ptr operator->()
{
return &_node->_data;
}
bool operator!=(const Self& s)
{
return _node != s._node;
}
Self& operator++()
{
if (_node->_next != nullptr)
{
_node = _node->_next;
}
else
{
keyoft kot;
size_t hashi = kot(_node->_data) % _ht->_tables.size();
++hashi;
while (hashi < _ht->_tables.size())
{
if (_ht->_tables[hashi])
{
_node = _ht->_tables[hashi];
break;
}
else
{
++hashi;
}
}
if (hashi == _ht->_tables.size())
{
_node = nullptr;
}
return *this;
}
}
};
template<class K,class T,class keyoft>
class HashTable
{
public:
typedef HashNode<T> Node;
typedef _HashIterator<K, T, T*, T&, keyoft> _iterator;
typedef _HashIterator<K, T, const T*,const T&, keyoft> const_iterator;
template<class K, class T, class Ptr, class Ref, class keyoft>
friend class _HashIterator;
_iterator begin()
{
Node* cur = nullptr;
for (size_t i = 0; i < _tables.size(); ++i)
{
cur = _tables[i];
if (cur)
{
break;
}
}
return _iterator(cur, this);
}
const_iterator begin()const
{
Node* cur = nullptr;
for (size_t i = 0; i < _tables.size(); ++i)
{
cur = _tables[i];
if (cur)
{
break;
}
}
return _iterator(cur, this);
}
_iterator end()
{
return _iterator(nullptr, this);
}
const_iterator end()const
{
return _iterator(nullptr, this);
}
_iterator find(const K& key)
{
if (_tables.size() == 0)
{
return end();
}
keyoft kot;
size_t hashi = key % _tables.size();
Node* cur = _tables[hashi];
while (cur)
{
if (kot(cur->_data) == key)
{
return _iterator(cur, this);
}
cur = cur->_next;
}
return end();
}
~HashTable()
{
for (auto& e : _tables)
{
while (e)
{
Node* next = e->_next;
delete e;
e = next;
}
e = nullptr;
}
}
bool Insert(const T& data)
{
keyoft kot;
if (_n == _tables.size())
{
//扩容
size_t newsize = _tables.size() == 0 ? 10 : _tables.size() * 2;
vector<Node*> newtables(newsize, nullptr);
for (auto& cur : _tables)
{
while (cur)
{
Node* next = cur->_next;
size_t hashi = kot(cur->_data) % newtables.size();
cur->_next = newtables[hashi];
newtables[hashi] = cur;
cur = next;
}
}
_tables.swap(newtables);
}
size_t hashi = kot(data) % _tables.size();
Node* newnode = new Node(data);
newnode->_next = _tables[hashi];
_tables[hashi] = newnode;
++_n;
return true;
}
bool Erase(const K& key)
{
keyoft kot;
size_t hashi = key % _tables.size();
Node* _prev = nullptr;
Node* cur = _tables[hashi];
while (cur)
{
if (kot(cur->_data) == key)
{
if (_prev == nullptr)
{
_tables[hashi] = cur->_next;
}
else
{
_prev->_next = cur->_next;
}
delete cur;
return true;
}
else
{
_prev = cur;
cur = cur->_next;
}
}
return false;
}
private:
vector<Node*> _tables;
size_t _n = 0;
};
}2:unordered_map.h
template<class K,class V>
class unordered__map
{
struct mapoft
{
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename HashBucket::HashTable<K, pair<const K, V>, mapoft>::_iterator iterator;
typedef typename HashBucket::HashTable<K, pair<const K, V>, mapoft>::const_iterator const_iterator;
bool Insert(const pair<K, V>& kv)
{
return _ht.Insert(kv);
}
bool Erase(const K& key)
{
return _ht.Erase(key);
}
iterator begin()
{
return _ht.begin();
}
iterator end()
{
return _ht.end();
}
private:
HashBucket::HashTable<K, pair<const K, V>, mapoft> _ht;
};3:unordered_set
#include"HashTable.h"
template<class K, class V>
class unordered__set
{
struct setoft
{
const K& operator()(const K& key)
{
return key;
}
};
public:
typedef typename HashBucket::HashTable<K, pair<const K, V>, mapoft>::const_iterator iterator;
typedef typename HashBucket::HashTable<K, pair<const K, V>, mapoft>::const_iterator const_iterator;
bool Insert(const pair<K, V>& kv)
{
return _ht.Insert(kv);
}
bool Erase(const K& key)
{
return _ht.Erase(key);
}
iterator begin()
{
return _ht.begin();
}
iterator end()
{
return _ht.end();
}
private:
HashBucket::HashTable<K, pair<const K, V>, setoft> _ht;
};4:讲解
K是用来find的时候使用的返回值,对于map来说不能没有。set可以没有,因为set是K K
V是上层传入的数据类型。
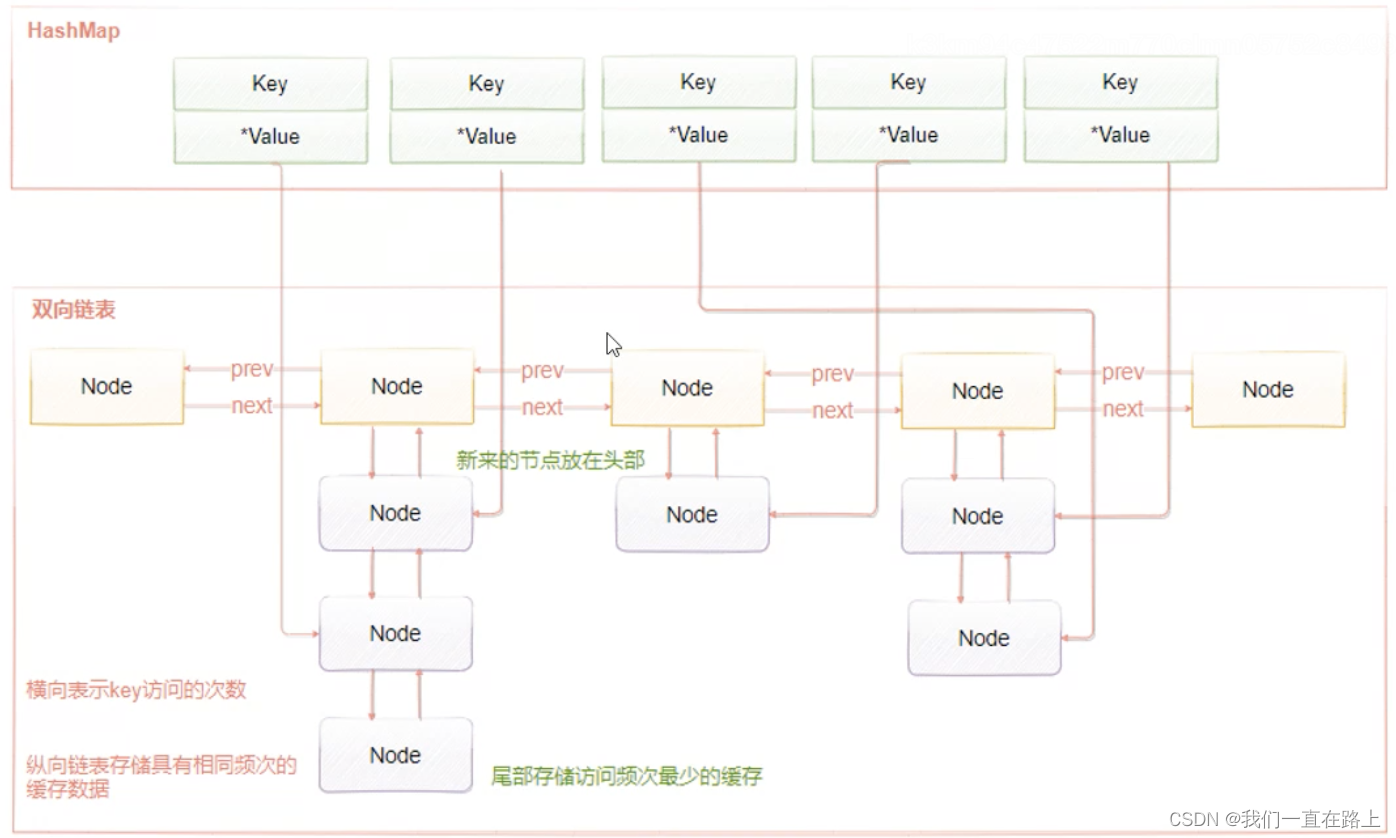
因为闭散列的哈希桶,如果迭代器++,有可能是在当前桶中遍历,也有可能是在vector中找下一个不为空的头节点,所以在迭代器中必须定义一个node和一个哈希桶指针ht。因为node里面不会存储下一个桶的地址。
迭代器要封装一个普通和const版本,对于set来说可以不需要普通迭代器,对于map来说则必须要,因为map的second可能会++。
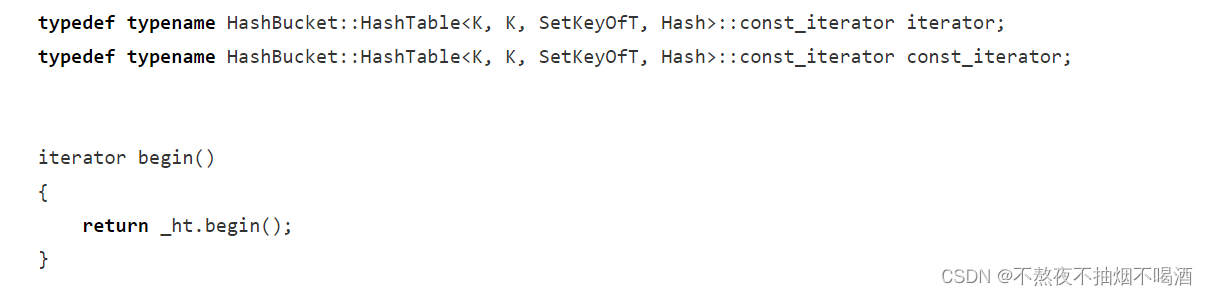
这里面如果set创建对象,是一个普通对象,普通对象return的是普通迭代器,但是函数返回值是const迭代器,所以这里就有从普通迭代器->const迭代器的转换。
还记得单参的构造函数可以隐式类型转换吗?
![]()

在迭代器里面我们定义了iterator是一个普通迭代器,因此我们想用普通迭代器转换为const迭代器,意思就是用普通迭代器去构造一个const迭代器。
对于开散列的插入,我们可以复用自己的insert,对于闭散列,不要浪费原来的节点,插入新节点就行了。
keyoft是一个仿函数,因为底层hashtable并不清楚V是什么类型,所以上层通过传入(pair和k)不同的类型,来返回到first或者k本身。
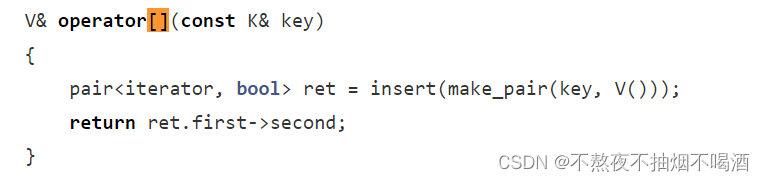
operator[]我这里没有实现,实现思路是让底层insert的返回值为pair<iterator,bool>,第一步是用map里面的pair<iterator,bool> ret接收insert的返回值,这样既能插入,又可以判断是否已经存在这个值,然后返回ret的first的second,比如我们排序的时候会用m[e]++,就是这个意思
实际上map这一层还会多一个参数hashfunc,比较一下map和unordered_map,要满足V能成为映射值,也就是可以取整,所以需要设计一个string类的转化为size_t的仿函数。
实际上针对扩容问题有一个更好的方案,让每次扩容的容量为质数。可以减少冲突
static const unsigned long __stl_prime_list[__stl_num_primes] =
{
53, 97, 193, 389, 769,
1543, 3079, 6151, 12289, 24593,
49157, 98317, 196613, 393241, 786433,
1572869, 3145739, 6291469, 12582917, 25165843,
50331653, 100663319, 201326611, 402653189, 805306457,
1610612741, 3221225473, 4294967291
};





![[abc复盘] abc301 20230514](https://img-blog.csdnimg.cn/6c53ebaa4a9344bb932d9f62e474816f.png)