目录
- 一、前言
- 二、三维空间的坐标系变换
- 三、MDH建模要点
- 四、MDH的变换矩阵推导
- 五、机械臂MDH的python模型
- 六、python源码
一、前言
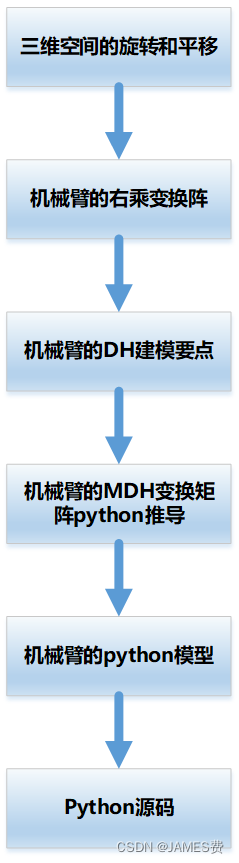
如果机器人工程师缺乏机器人学理论的支撑和足够的认识,那么随着机器人项目的深入推进,可能会越走越艰难,所谓万丈高楼平地起,必须得打好比万丈高楼还要夯实得地基,大厦才能牢固。本篇对六轴机械臂的基础建模知识进行了较为彻底的梳理,参考了较多的网上资料,发现,很多文章或者教程并没有把DH建模这个事说得特别清楚,这里对一些注意点或者所谓的坑做了一些着重说明,仅供参考。本篇花了笔者1周的时间整理和思考,全篇的思路如下:

二、三维空间的坐标系变换
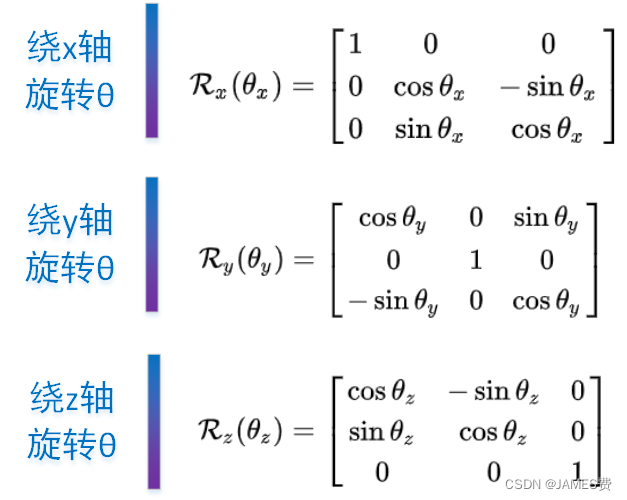
我们知道,一个直角坐标系遵照右手定则,沿着某个轴逆时针旋转θi角度的旋转矩阵为:
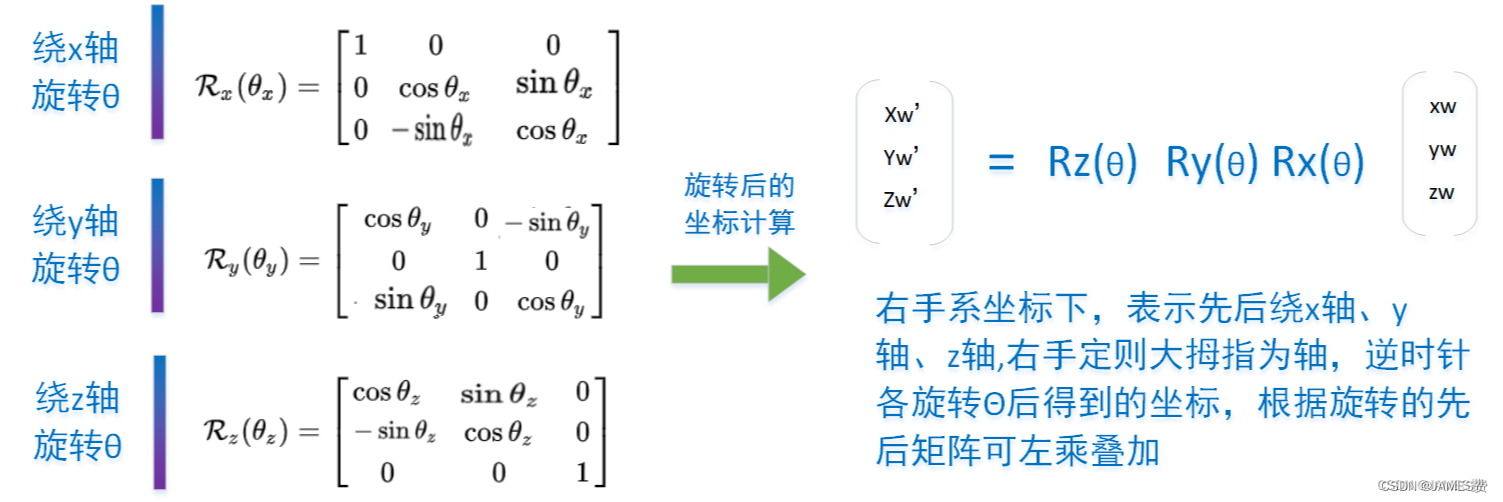
我们知道,任何一个坐标系f0,可以通过三个以上基础旋转,唯一变换到另一个同原点的坐标系fn,两个关系可以用按照变换的先后顺序左乘表示,如上图右侧。
我们知道,三维空间里,如果有两个坐标系F0,F6,如果想知道P在F6系中的向量(或者点坐标)在F0系中是多少,可以通过如下的两种形式表示:
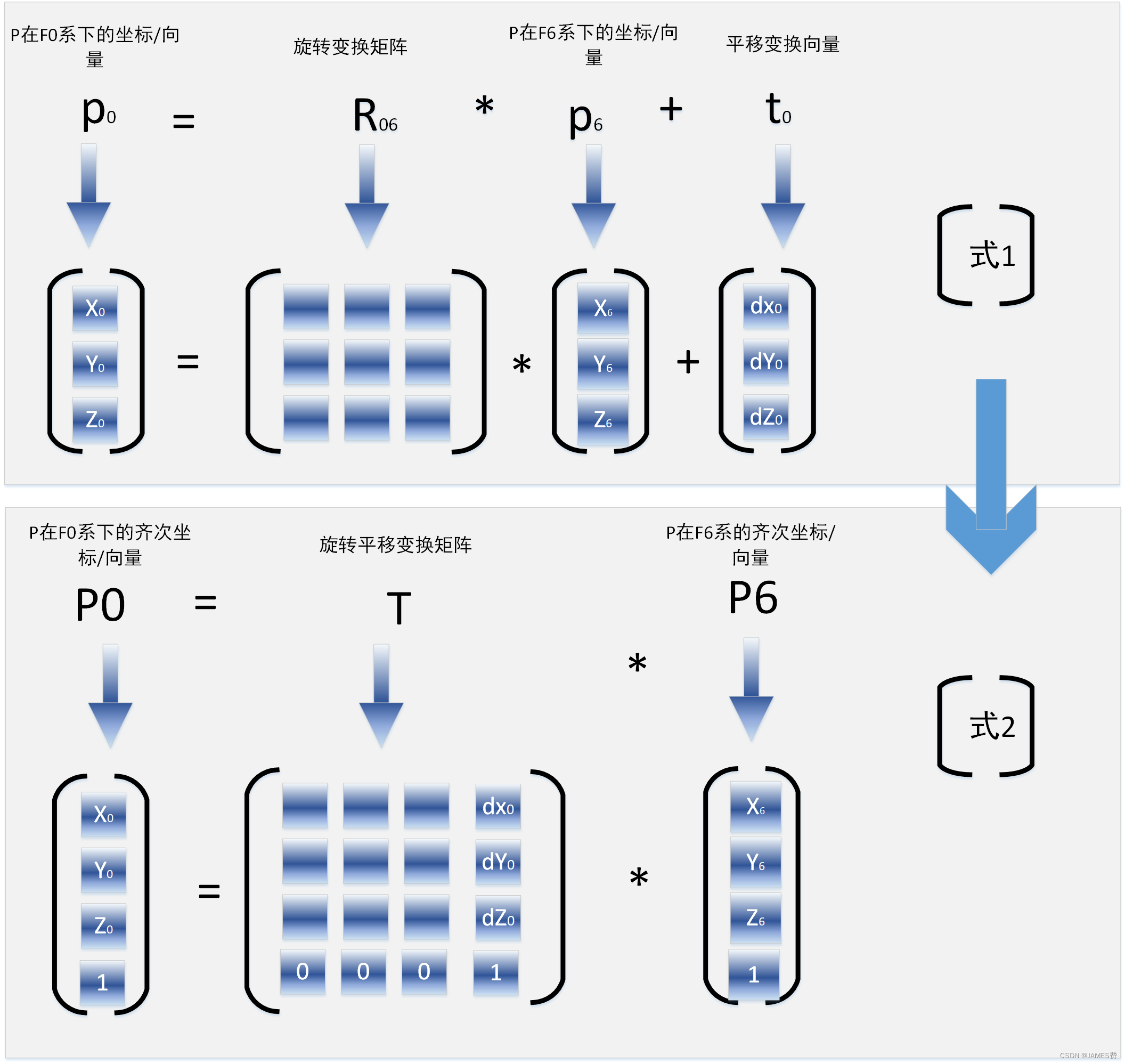
如上式2所示,旋转和平移可以组成一个齐次变换矩阵T,用在机械臂上面,可以表示一个机械臂的末端位姿:
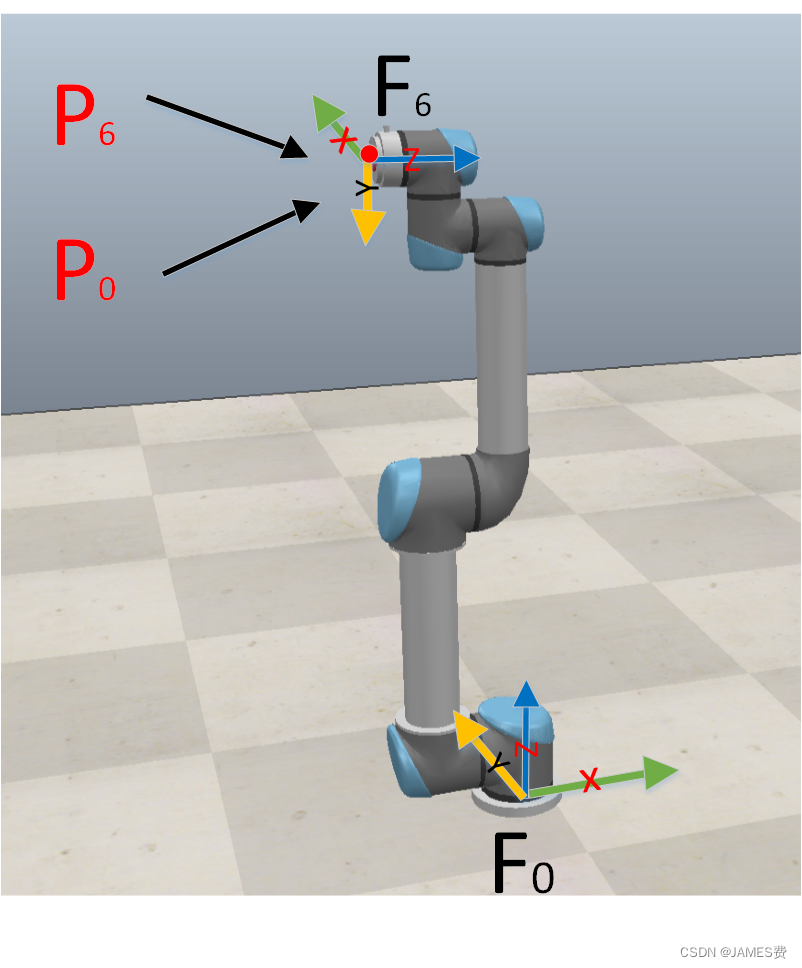
如上图,机械臂的末端位姿有两部分组成:
可以理解为一个是末端原点的坐标t0,一个是旋转量R06(或者可以用欧拉角序列、翻滚⾓-俯仰⾓-偏航⾓序列等表示),在图中对应的红点就是机械臂的末端的原点,其坐标其实就是t0,也就是式2中的T中的最后一列前三个(dx0,dy0,dz0)。末端的姿态还涉及到旋转,这个信息是含在了旋转矩阵R06(见式1)中。
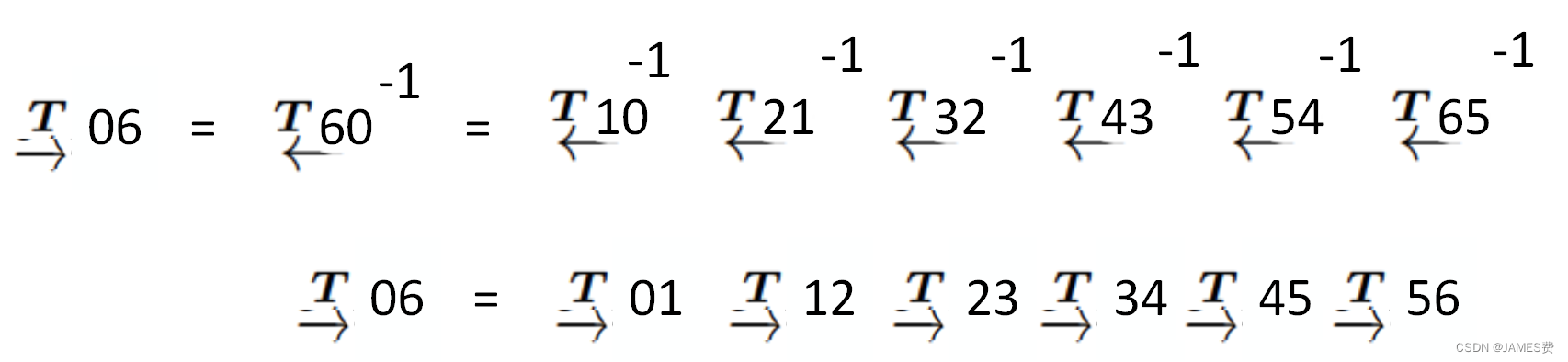
在机械臂中,可以控制的只有各个关键的电机角度,六轴就是六个电机的角度[q1,q2,q3,q4,q5,q6],通过设定六个电机角度,可以把机械臂的末端送到目标的位置。这个过程,数学上相当于机械臂基座的坐标系,通过一些列的旋转平移变换到了末端,由如下的这种机制:

变换的矩阵T可以分解连乘得到:

T60表示的是末端F0到F6的运动,注意到,由于变换的顺序是左乘原则,就是越左边的运动越晚,这与我们直观的感觉想违背,我们直观理解是从左往右依次进行(右乘原则),这个可以根据变换矩阵的性质,给转变过来:
根据以上性质,可以得到右乘形式:
机械臂的建模就是基于类似这样的机制,有学者经过研究简化后,提出了机器人的DH建模理论。
于是,DH建模所用到的基础旋转矩阵就变为:
三、MDH建模要点
DH建模有两种,一种是标准DH建模,SDH,一种是改进DH,MDH。为了后续建模方便,建议使用MDH规则建模。其主要的原理是这样的:
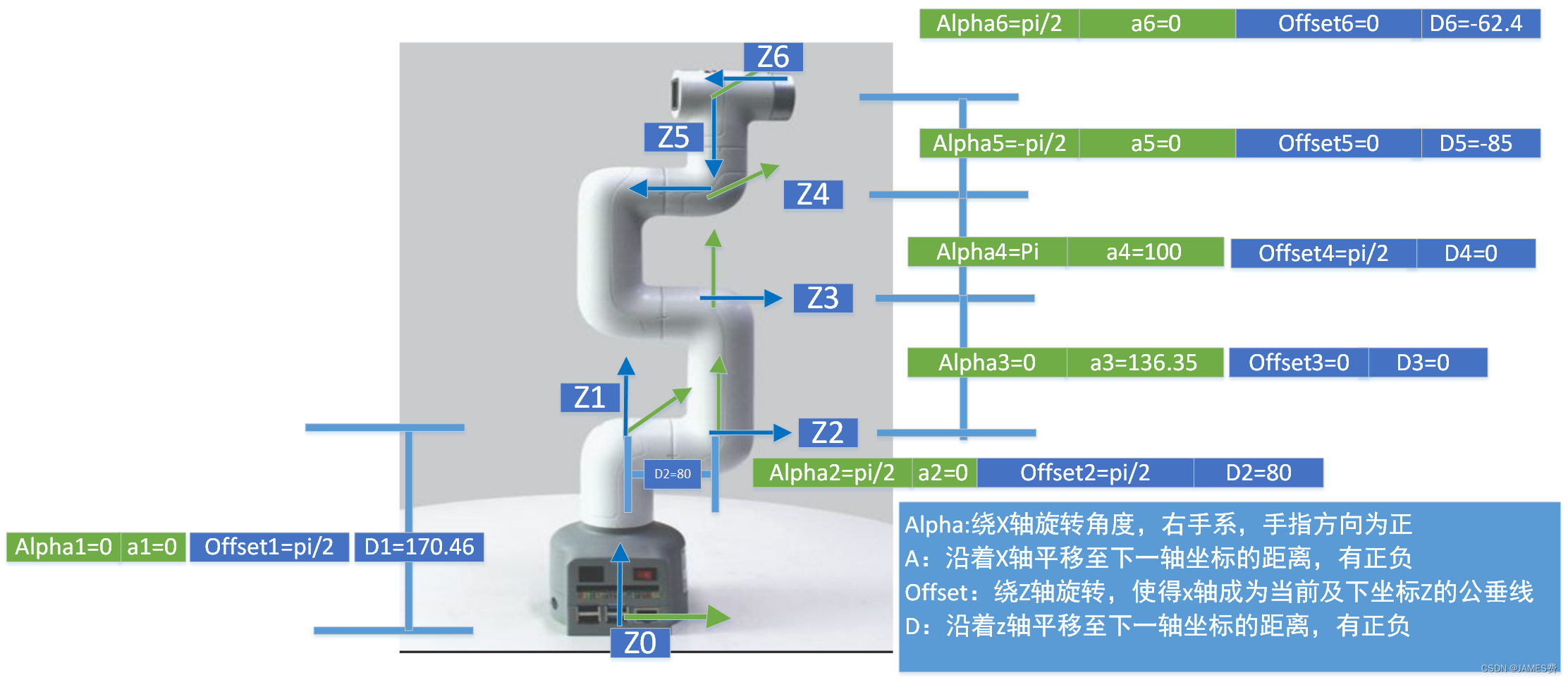
(1)先确定z轴(各关节的电机转轴):
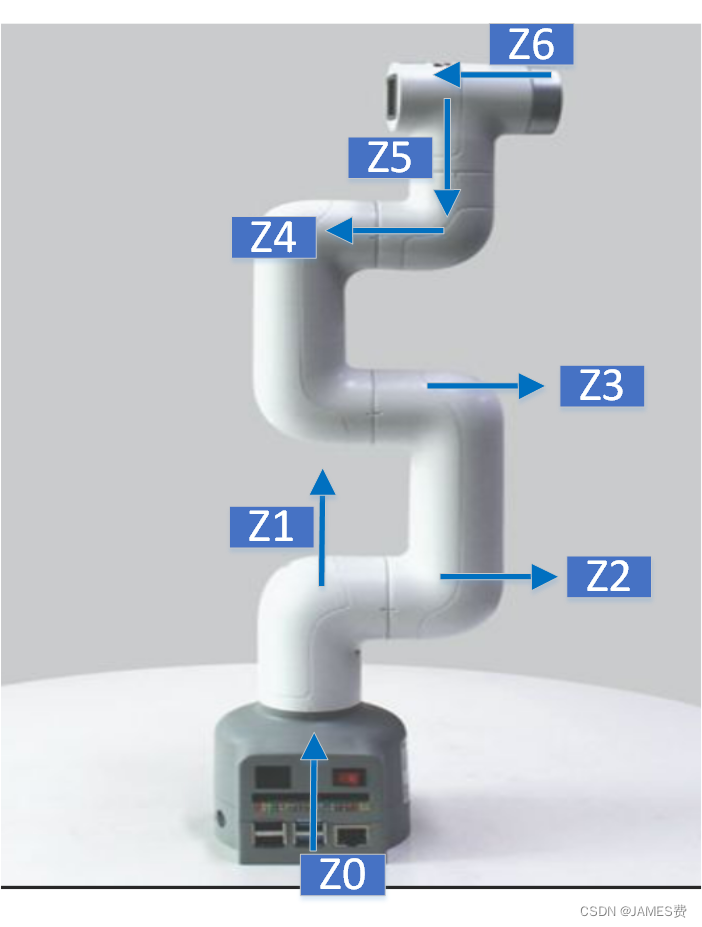
(2)逐步从固定支座base坐标系F0,确定x轴的方向,原则是x轴的要是本坐标系z轴和下一个坐标系z轴的公垂线。如上图,X0轴应该垂直于Z0,和Z1,那么可以这么定:
如上图,X0垂直于轴Z0和Z1,X1轴垂直于Z1和Z2,X2应该垂直于Z2和Z3…
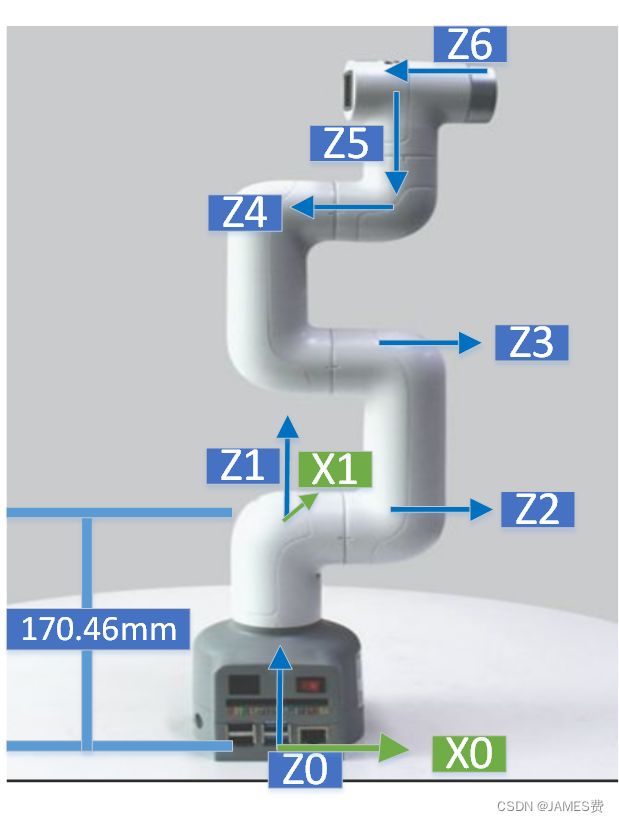
(3)根据右乘原理,MDH中规定当前关节i的参数先后的顺序是:

以上面的坐标系F1为例,四个参数代表是坐标F0系,先以X0轴旋转Alpha,再沿着x0轴方向移动a(负方向移动为负数),再以Z0为轴旋转Offset,最后沿着Z0方向移动d(负方向移动为负数),最后得到F1坐标系。此处,alpha1=0,X0不需要旋转,a=0,沿着X0没有平移,offset=pi/2,沿着Z0逆时针旋转90度,X0轴转到了X1轴的位置,然后d=170.56,沿着Z0正方向移动了170.56,这样经过连续的旋转+平移后,就完成了关键1的参数建模。以此类推,逐步确定其余5组参数。
所有的参数确定,如下图示例所示:
四、MDH的变换矩阵推导
根据以上的分析,MDH模型中,从一个坐标系Fi-1到Fi的变换矩阵其实可以这些推导:用python表示:
import sympy as sy
#MDH
alpha=[0,np.pi/2,0,np.pi,-np.pi/2,np.pi/2]
a=[0,0,136.35,100,0,0]
offset=[np.pi/2,np.pi/2,0,np.pi/2,0,0]
d=[170.46,80,0,0,-85,-62.4]
"""推导转换矩阵"""
#z轴旋转角度
theta1=sy.Symbol("theta1")
#z轴平移
d1=sy.Symbol("d1")
#x轴旋转角度
al1=sy.Symbol("al1")
#x轴平移
a1=sy.Symbol("a1")
def MTi(alpha,a,d,theta,DHtype="MDH"):
#x轴旋转变化阵,右手系,逆时针为正
Rx=sy.Matrix([
[1, 0, 0, 0],
[0, sy.cos(alpha), -sy.sin(alpha), 0],
[0, sy.sin(alpha), sy.cos(alpha), 0],
[0, 0, 0, 1]
])
#沿着x轴平移,有方向
Tx=sy.Matrix([
[1, 0, 0, a],
[0, 1, 0, 0],
[0, 0,1, 0],
[0, 0,0, 1]
])
#z轴旋转阵,右手系,逆时针为正
Rz=sy.Matrix([
[sy.cos(theta), -sy.sin(theta), 0, 0],
[sy.sin(theta), sy.cos(theta), 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
#沿着z轴平移,有方向
Tz=sy.Matrix([
[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0,1, d],
[0, 0,0, 1]
])
print("MDH——TR",Rx@Tx@Rz@Tz)
#右乘原则,先旋转X轴alpha,再沿X轴平移a,再旋转Z轴theta(这里为offset值),最后沿着Z轴平移D
return Rx@Tx@Rz@Tz
#MDH的转换矩阵如下:
MTi(al1,a1,d1,theta1)
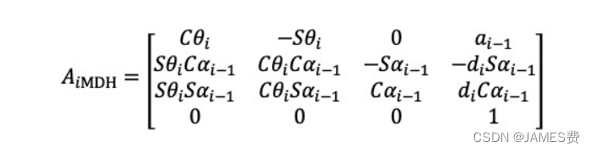
可得到MDH的基本变换矩阵为:

简写如下:
五、机械臂MDH的python模型
根据右乘原则,整个机械臂的变换矩阵,可以由6个基本变换矩阵右先后右乘获得:
A06=A1A2A2A4A5*A6
用python推导计算如下:
#MDH方法
import sympy as sy
import numpy as np
import math
from math import atan2
#MDH参数
alpha=[0,np.pi/2,0,np.pi,-np.pi/2,np.pi/2]
a=[0,0,136.35,100,0,0]
offset=[np.pi/2,np.pi/2,0,np.pi/2,0,0]
d=[170.46,80,0,0,-85,-62.4]
def MTi(alpha,a,d,theta,DHtype="MDH"):
#x轴变化阵,右手系,顺针旋负方向
Rx=sy.Matrix([
[1, 0, 0, 0],
[0, sy.cos(alpha), -sy.sin(alpha), 0],
[0, sy.sin(alpha), sy.cos(alpha), 0],
[0, 0, 0, 1]
])
#沿着x轴平移,有方向
Tx=sy.Matrix([
[1, 0, 0, a],
[0, 1, 0, 0],
[0, 0,1, 0],
[0, 0,0, 1]
])
#z轴旋转阵,右手系,顺针旋负方向
Rz=sy.Matrix([
[sy.cos(theta), -sy.sin(theta), 0, 0],
[sy.sin(theta), sy.cos(theta), 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
#沿着z轴平移,有方向
Tz=sy.Matrix([
[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0,1, d],
[0, 0,0, 1]
])
print("MDH——TR",Rx@Tx@Rz@Tz)
return Rx@Tx@Rz@Tz
def Aiv(alpha,a,d,offset,theta=[0,0,0,0,0,0],Tnum=6):
"""
依次右乘,推导出机械臂位姿矩阵
"""
for i in range(Tnum):
Ti=MTi(alpha[i],a[i],d[i],offset[i])
if i==0:
Ai=Ti
else:
Ai=Ai@Ti
return Ai
#机械臂位姿矩阵如下
A06= Aiv(alpha,a,d,offset)
print("位姿矩阵:",A06)
可以计算得到机械臂的位姿矩阵:

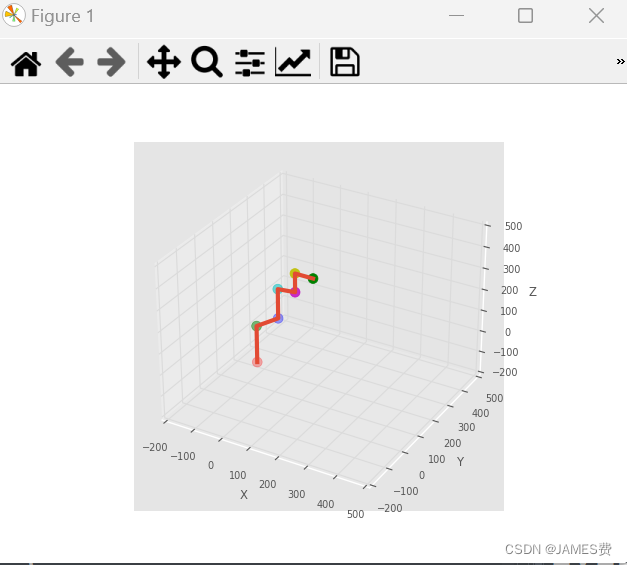
至此根据建立的MDH参数,就可以计算出末端的位姿矩阵了,为了画出机械臂的样子,我们可以通过连续变换矩阵,分别计算出各轴的位姿,并用matplot画出来:
六、python源码
可复制直接运行。
python源码资源地址