一、前言
此示例说明如何使用广义互相关 (GCC) 和三角测量来确定宽带信号源的位置。为简单起见,此示例仅限于由一个源和两个接收传感器阵列组成的二维方案。您可以将此方法扩展到两个以上的传感器或传感器阵列以及三维。
二、介绍
源定位不同于到达方向 (DOA) 估计。DOA估计仅寻求确定来自传感器的源的方向。源本地化决定了它的位置。在此示例中,源本地化由两个步骤组成,第一个步骤是 DOA 估计。
使用 DOA 估计算法估计每个传感器阵列的源方向。对于宽带信号,许多众所周知的到达方向估计算法(如Capon方法或MUSIC)无法应用,因为它们采用元件之间的相位差,使其仅适用于窄带信号。在宽带情况下,您可以使用元件之间信号到达时间的差异,而不是相位信息。为了计算到达时间差值,此示例使用广义相变互相关 (GCC-PHAT) 算法。根据到达时间的差异,您可以计算 DOA。
通过三角测量计算源位置。首先,从数组沿到达方向绘制直线。然后,计算这两条线的交点。这是源位置。源定位需要了解接收传感器或传感器阵列的位置和方向。
三、三角测量公式
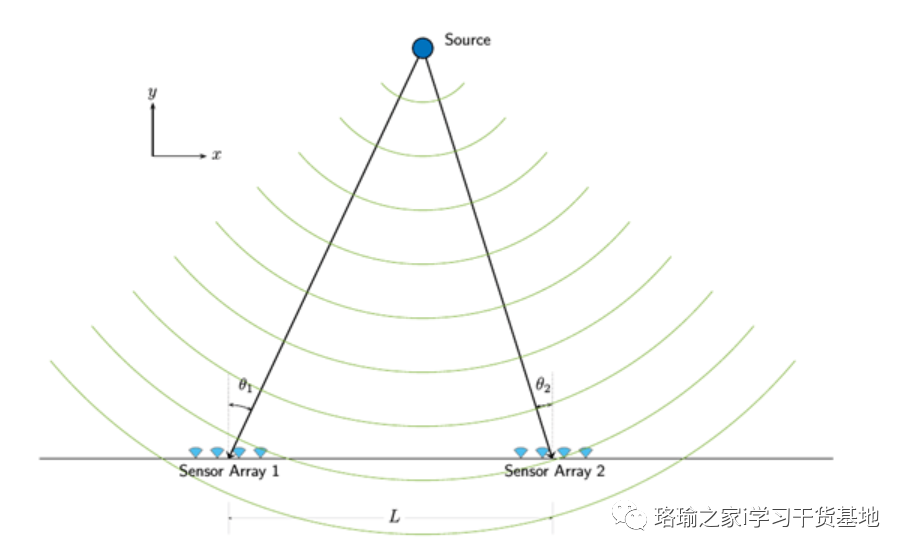
三角测量算法基于简单的三角函数公式。假设传感器阵列位于二维坐标 (2,0) 和 (L,0) 处,未知源位置为 (x,y)。
此示例的其余部分说明如何使用相控阵系统工具箱™的函数和系统对象来计算源位置。
四、源和传感器几何形状
设置两个沿全局坐标系的 x 轴对齐且间隔 4 米的接收 50 元素 ULA。第一个阵列的相心是 (0,0,0) 。第二个阵列的相心为 (50,0,0) 。源位于(30,100)米处。如图所示,接收阵列增益点在+y方向上。源沿 -y 方向传输。
指定传感器阵列之间的基线。创建全向麦克风的 4 元件接收器 ULA。可以对两个数组的 和 系统对象使用相同的系统对象。指定第一个传感器阵列的位置和方向。创建 ULA 时,数组元素会自动沿 y 轴间隔。必须将阵列的局部轴旋转 90°,才能沿全局坐标系的 x 轴对齐元素。
指定第二个传感器阵列的位置和方向。选择第二个阵列的局部轴以与第一个阵列的局部轴对齐。将信号源指定为单个全向传感器。
五、定义波形
选择源信号为宽带LFM波形。假设系统的工作频率为300 kHz,并将信号带宽设置为100 kHz。假设最大工作范围为 150 m。然后,您可以设置脉冲重复间隔 (PRI) 和脉冲重复频率 (PRF)。假设占空比为10%,并设置脉冲宽度。最后,在1500 m / s的水下通道中使用声速。
设置 LFM 波形参数并创建系统对象。
然后可以生成发射信号。
六、辐射、传播和收集信号
对宽带系统的辐射和传播进行建模比对窄带系统进行建模更复杂。例如,衰减取决于频率。多普勒频移以及由于信号输入方向而导致的元件之间的相移也根据频率而变化。因此,在处理宽带信号时对这些行为进行建模至关重要。此示例使用子带方法。
将子带数设置为 128。指定源辐射器和传感器阵列收集器。为从源到两个传感器阵列的路径创建宽带信号传播器。确定从源到传感器阵列的传播方向。传播方向相对于源的局部坐标系。
沿传感器阵列的方向辐射来自源的信号。然后,将信号传播到传感器阵列。计算传播信号在传感器阵列上的到达方向。由于收集器响应是传感器阵列局部坐标系中到达方向的函数,因此请将局部坐标轴矩阵传递给函数。在接收传感器阵列上收集信号。
七、估计和三角测量
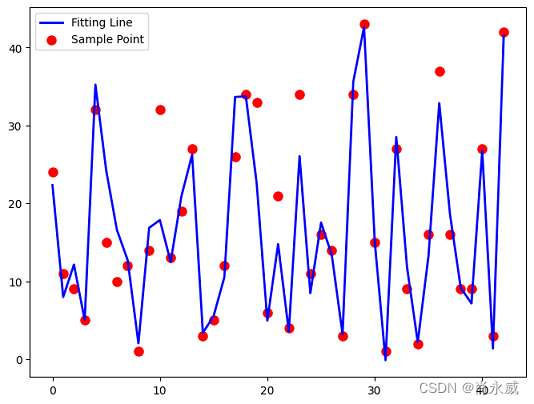
创建 GCC-PHAT 估算器。估计到达方向。使用前面建立的公式对源位置进行三角测量。由于方案仅限于 x-y 平面,因此请将 z 坐标设置为零。
估计的源位置与真实位置匹配,在 30 厘米以内。
八、总结
此示例演示如何使用三角测量执行源本地化。具体而言,该示例展示了如何仿真、传播和处理宽带信号。GCC-PHAT 算法用于估计宽带信号的到达方向。
九、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.mlx”文件,点击运行,就可以看到上述效果。
程序下载:https://download.csdn.net/download/weixin_45770896/87666379