文章目录
- PL
- PS
- SPI
- GPIO
- AXI-GPIO
- AXI-Quad-SPI(待测试)
本文记录一下在使用AD9363中的SPI通信问题,同时针对在ZYNQ系列开发板上实现SPI的方法做一个总结。
ZYNQ系列包含了PL端和PS端,因为本科阶段有一定的ARM的开发经验,便想着学习一下ZYNQ的PL端的基础开发。于是,有了下文。
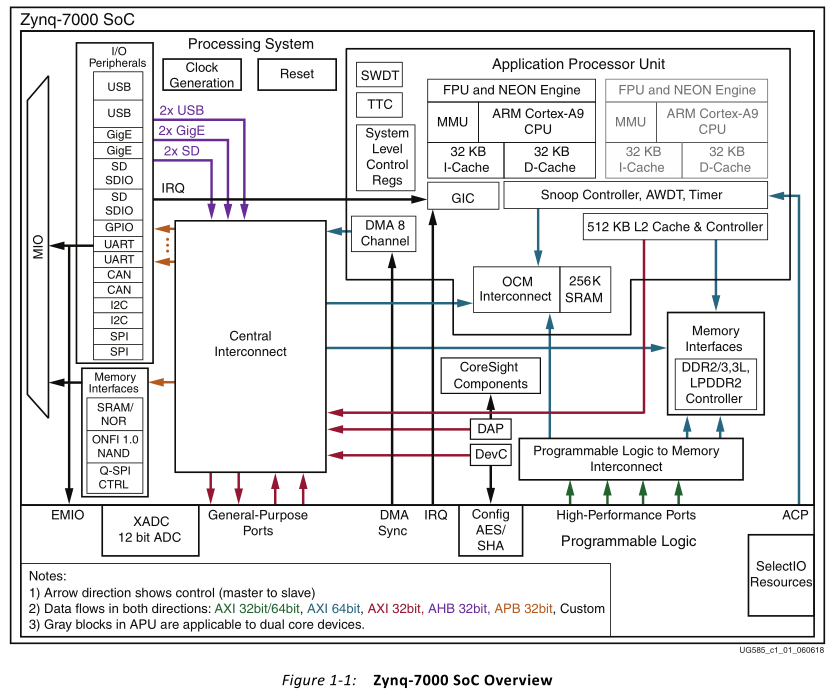
Zynq-7000 SOC的系统框图如上,PL自然是使用HDL语言来开发,也是FPGA开发的老本行了。观察PS端的资源,可以看到其外已经包含了SPI控制器,同时还有丰富的GPIO。联想到ARM开发中常说的软件SPI和硬件SPI,便可以从中入手。后面还会介绍使用Xilinx的IP核在实现SPI。
关于SPI的具体细节就不介绍了,直接看需求。

从AD9363的SPI Configuration寄存器的默认值0x00,可知其上电默认采用MSB first的4-wire SPI。

指令字的第15位决定在指令字节写入之后是读数据传输还是写数据传输。逻辑高表示写操作;逻辑零表示读操作。
指令字的位[14:12] 指定在I/O 操作的阶段2 期间传输的字节数,简单起见,直接默认NB2-NB0 = b000。
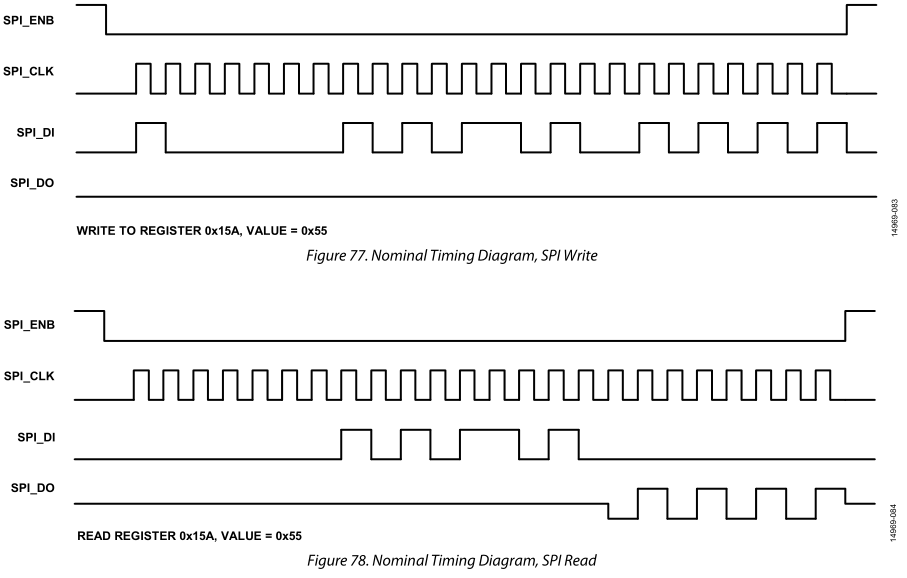
官方手册中的读写时序如下图。可知其CPOL = 0,即SPI_SCLK空闲为低电平;CPHA = 1,即在SPI_SCLK第二个跳变沿采样。
PL
源代码(来自Alinx FL9267参考例程):
该模块完成了SPI单个字节的传输功能,可设置时钟分频、时钟极性、时钟相位。使用时,可以直接修改程序将该模块扩展至三个字节;也可以再写一个模块,完成三个字节读写的控制。
module spi_master
(
input sys_clk,
input rst,
output nCS, //chip select (SPI mode)
output DCLK, //spi clock
output MOSI, //spi data output
input MISO, //spi input
input CPOL,
input CPHA,
input nCS_ctrl,
input[15:0] clk_div,
input wr_req,
output wr_ack,
input[7:0] data_in,
output[7:0] data_out
);
localparam IDLE = 0;
localparam DCLK_EDGE = 1;
localparam DCLK_IDLE = 2;
localparam ACK = 3;
localparam LAST_HALF_CYCLE = 4;
localparam ACK_WAIT = 5;
reg DCLK_reg;
reg[7:0] MOSI_shift;
reg[7:0] MISO_shift;
reg[2:0] state;
reg[2:0] next_state;
reg [15:0] clk_cnt;
reg[4:0] clk_edge_cnt;
assign MOSI = MOSI_shift[7];
assign DCLK = DCLK_reg;
assign data_out = MISO_shift;
assign wr_ack = (state == ACK);
assign nCS = nCS_ctrl;
always@(posedge sys_clk or posedge rst)
begin
if(rst)
state <= IDLE;
else
state <= next_state;
end
always@(*)
begin
case(state)
IDLE:
if(wr_req == 1'b1)
next_state <= DCLK_IDLE;
else
next_state <= IDLE;
DCLK_IDLE:
//half a SPI clock cycle produces a clock edge
if(clk_cnt == clk_div)
next_state <= DCLK_EDGE;
else
next_state <= DCLK_IDLE;
DCLK_EDGE:
//a SPI byte with a total of 16 clock edges
if(clk_edge_cnt == 5'd15)
next_state <= LAST_HALF_CYCLE;
else
next_state <= DCLK_IDLE;
//this is the last data edge
LAST_HALF_CYCLE:
if(clk_cnt == clk_div)
next_state <= ACK;
else
next_state <= LAST_HALF_CYCLE;
//send one byte complete
ACK:
next_state <= ACK_WAIT;
//wait for one clock cycle, to ensure that the cancel request signal
ACK_WAIT:
next_state <= IDLE;
default:
next_state <= IDLE;
endcase
end
always@(posedge sys_clk or posedge rst)
begin
if(rst)
DCLK_reg <= 1'b0;
else if(state == IDLE)
DCLK_reg <= CPOL;
else if(state == DCLK_EDGE)
DCLK_reg <= ~DCLK_reg;//SPI clock edge
end
//SPI clock wait counter
always@(posedge sys_clk or posedge rst)
begin
if(rst)
clk_cnt <= 16'd0;
else if(state == DCLK_IDLE || state == LAST_HALF_CYCLE)
clk_cnt <= clk_cnt + 16'd1;
else
clk_cnt <= 16'd0;
end
//SPI clock edge counter
always@(posedge sys_clk or posedge rst)
begin
if(rst)
clk_edge_cnt <= 5'd0;
else if(state == DCLK_EDGE)
clk_edge_cnt <= clk_edge_cnt + 5'd1;
else if(state == IDLE)
clk_edge_cnt <= 5'd0;
end
//SPI data output
always@(posedge sys_clk or posedge rst)
begin
if(rst)
MOSI_shift <= 8'd0;
else if(state == IDLE && wr_req)
MOSI_shift <= data_in;
else if(state == DCLK_EDGE)
if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b1)
MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};
else if(CPHA == 1'b1 && (clk_edge_cnt != 5'd0 && clk_edge_cnt[0] == 1'b0))
MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};
end
//SPI data input
always@(posedge sys_clk or posedge rst)
begin
if(rst)
MISO_shift <= 8'd0;
else if(state == IDLE && wr_req)
MISO_shift <= 8'h00;
else if(state == DCLK_EDGE)
if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b0)
MISO_shift <= {MISO_shift[6:0],MISO};
else if(CPHA == 1'b1 && (clk_edge_cnt[0] == 1'b1))
MISO_shift <= {MISO_shift[6:0],MISO};
end
endmodule
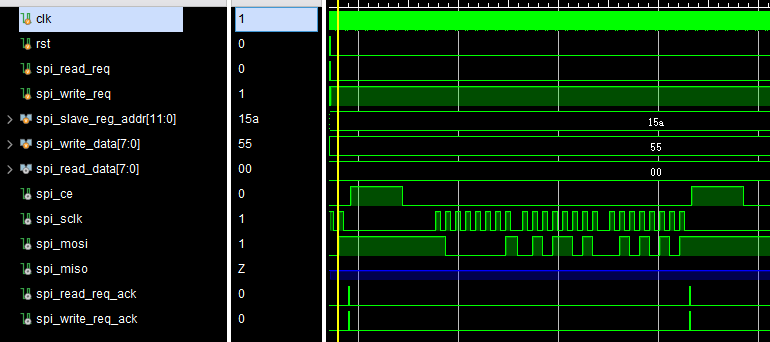
仿真结果:
PS
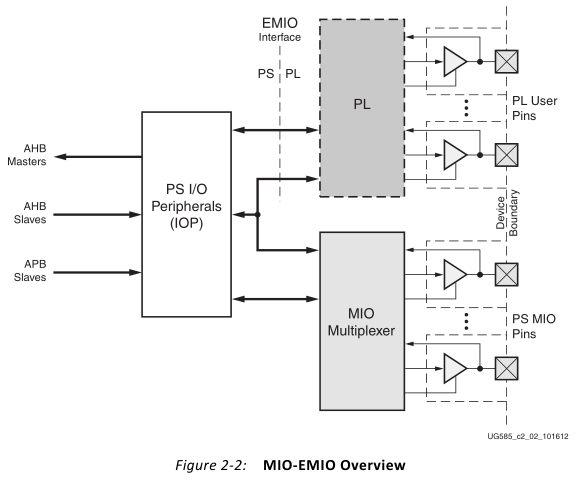
ZYNQ-7000共有54个MIO引脚,其引脚是固定的;还有64个EMIO接口,可以通过修改约束文件连接到PL端的引脚。
SPI
ZYNQ-7000 SOC中SPI 控制器的特性如下。
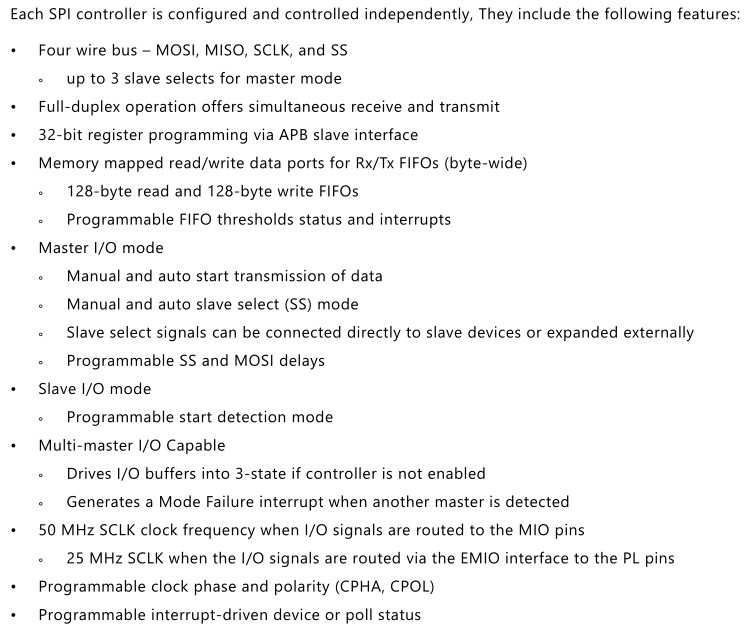
值得注意的是,SPI控制器的总线可以连接到MIO引脚,也可以连接到EMIO接口,但是前者的SCLK最大速率可达到50 MHz,后者SCLK速率最高支持25 MHz。
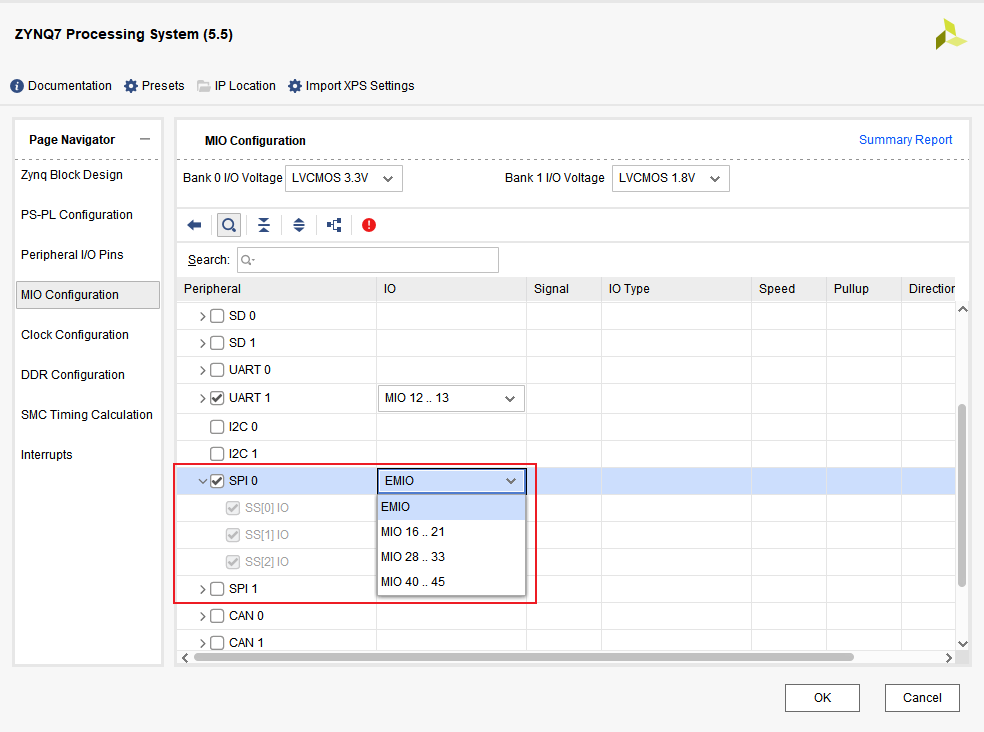
Vivado Block Diagram中的配置如下。
在ZYNQ7 Processing System IP核中勾选SPI0,并根据开发板原理图选择IO,可选固定MIO或EMIO。其他使用PS端的基本配置和建立工程步骤就不详细展开了。
ad936x_spi.c
#include "ad936x_spi.h"
XSpiPs_Config *spi_config;
XSpiPs spi_instance;
int32_t spi_init(uint32_t device_id, uint8_t clk_pha, uint8_t clk_pol)
{
uint32_t base_addr = 0;
uint32_t spi_options = 0;
spi_config = XSpiPs_LookupConfig(device_id);
base_addr = spi_config->BaseAddress;
XSpiPs_CfgInitialize(&spi_instance, spi_config, base_addr);
spi_options = XSPIPS_MASTER_OPTION |
(clk_pol ? XSPIPS_CLK_ACTIVE_LOW_OPTION : 0) |
(clk_pha ? XSPIPS_CLK_PHASE_1_OPTION : 0) |
XSPIPS_FORCE_SSELECT_OPTION;
XSpiPs_SetOptions(&spi_instance, spi_options);
XSpiPs_SetClkPrescaler(&spi_instance, XSPIPS_CLK_PRESCALE_32);
return 0;
}
int32_t spi_read(uint8_t *data, uint8_t bytes_number)
{
XSpiPs_SetSlaveSelect(&spi_instance, 0);//spi0
XSpiPs_PolledTransfer(&spi_instance, data, data, bytes_number);
return 0;
}
int spi_write_then_read(unsigned char *txbuf, unsigned n_tx, unsigned char *rxbuf, unsigned n_rx)
{
uint8_t buffer[20] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00
};
uint8_t byte;
for(byte = 0; byte < n_tx; byte++) {
buffer[byte] = (unsigned char)txbuf[byte];
}
spi_read(buffer, n_tx + n_rx);
for(byte = n_tx; byte < n_tx + n_rx; byte++) {
rxbuf[byte - n_tx] = buffer[byte];
}
return 0;
}
uint8_t ad936x_spi_read(uint16_t addr)
{
uint8_t txbuf[2];
uint8_t rxbuf[1];
uint8_t addr_msb = addr>>8;
uint8_t addr_lsb = (uint8_t)addr;
txbuf[0] = 0x7F & addr_msb;
txbuf[1] = addr_lsb;
spi_write_then_read(txbuf, 2, rxbuf, 1);
return rxbuf[0];
}
void ad936x_spi_write(uint16_t addr, uint8_t data)
{
uint8_t txbuf[3];
uint8_t addr_msb = addr>>8;
uint8_t addr_lsb = (uint8_t)addr;
txbuf[0] = 0x80|addr_msb;
txbuf[1] = addr_lsb;
txbuf[2] = data;
spi_write_then_read(txbuf, 3, NULL, 0);
}
ad936x_spi.h
#ifndef SRC_AD936X_SPI_H_
#define SRC_AD936X_SPI_H_
#include <stdint.h>
#include "stdio.h"
#include "xparameters.h"
#include "xspips.h"
#include "sleep.h"
#define SPI_DEVICE_ID XPAR_PS7_SPI_0_DEVICE_ID
int32_t spi_init(uint32_t device_id, uint8_t clk_pha, uint8_t clk_pol);
int32_t spi_read(uint8_t *data, uint8_t bytes_number);
int spi_write_then_read(unsigned char *txbuf, unsigned n_tx, unsigned char *rxbuf, unsigned n_rx);
uint8_t ad936x_spi_read(uint16_t addr);
void ad936x_spi_write(uint16_t addr, uint8_t data);
#endif /* SRC_AD936X_SPI_H_ */
GPIO
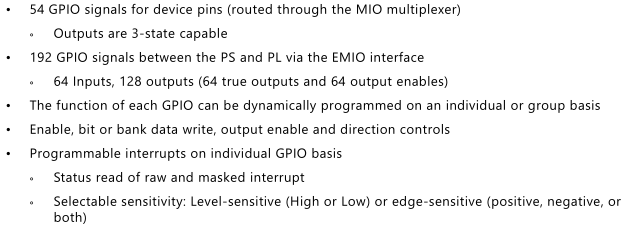
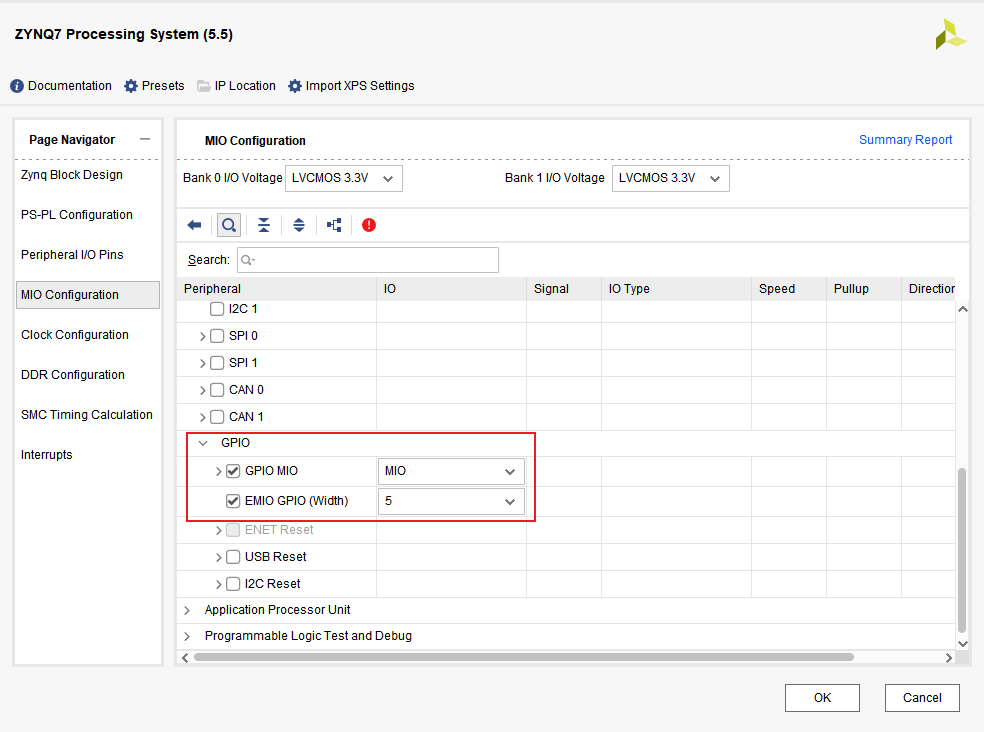
ZYNQ-7000 SOC中GPIO的特性和框图如下。
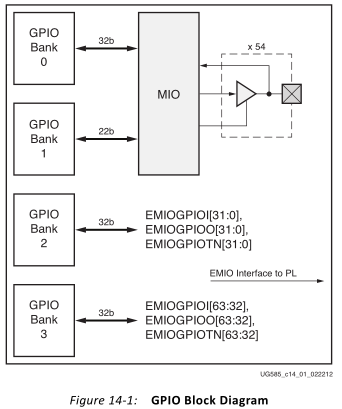
在ZYNQ7 Processing System IP核中勾选GPIO,其IO默认MIO,若想使用EMIO连接到PL的引脚,可勾选EMIOGPIO(Width),并选择宽度,即需要使用多少个引脚。
用软件方式模拟实现SPI,只需要知道GPIO是如何输入输出的。
只给出初始化函数和GPIO输入输出操作函数,其他程序段参考下一节AXI_GPIO的内容。
#define GPIO_DEVICE_ID XPAR_PS7_GPIO_0_DEVICE_ID
//MIO 0-53
#define MIO_LED 15
//EMIO 54-117
#define SPI_SCLK_Pins 54
#define SPI_MOSI_Pins 55
#define SPI_MISO_Pins 56
#define SPI_CS_Pins 57
#define RESET_Pins 58
XGpioPs_Config *gpio_config;
XGpioPs gpio_instance;
void gpio_init(uint32_t device_id)
{
gpio_config = XGpioPs_LookupConfig(device_id);
XGpioPs_CfgInitialize(&gpio_instance, gpio_config, gpio_config->BaseAddr);
gpio_direction(MIO_LED, 1);
gpio_direction(SPI_SCLK_Pins, 1);
gpio_direction(SPI_MOSI_Pins, 1);
gpio_direction(SPI_MISO_Pins, 0);
gpio_direction(SPI_CS_Pins, 1);
gpio_direction(RESET_Pins, 1);
gpio_set_value(GPIO_RESET, 0);
gpio_set_value(STA_LED, 0);
}
void gpio_direction(uint8_t pin, uint8_t direction)
{ //0 input, 1 output
XGpioPs_SetDirectionPin(&gpio_instance, pin, direction);
XGpioPs_SetOutputEnablePin(&gpio_instance, pin, 1);
}
void gpio_set_value(uint8_t pin, uint8_t value)
{
XGpioPs_WritePin(&gpio_instance, pin, value);
}
uint8_t gpio_get_value(uint8_t pin)
{
return (uint8_t)XGpioPs_ReadPin(&gpio_instance, pin);
}
AXI-GPIO
AXI-GPIO IP核可以说PS端GPIO的拓展,可以直接编写HDL程序控制该IP核,这里只讲解如何在PS端通过C语言程序控制,其本质也是对AXI总线的寄存器的读写。
使用AXI_GPIO的难点是如何控制将单个引脚的控制转换成AXI总线的地址读写操作。
#define SPI_SCLK_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<SPI_SCLK_Pins))
#define SPI_SCLK_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<SPI_SCLK_Pins)))
#define SPI_MOSI_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<SPI_MOSI_Pins))
#define SPI_MOSI_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<SPI_MOSI_Pins)))
#define SPI_CS_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<SPI_CS_Pins))
#define SPI_CS_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<SPI_CS_Pins)))
#define RESET_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<RESET_Pins))
#define RESET_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<RESET_Pins)))
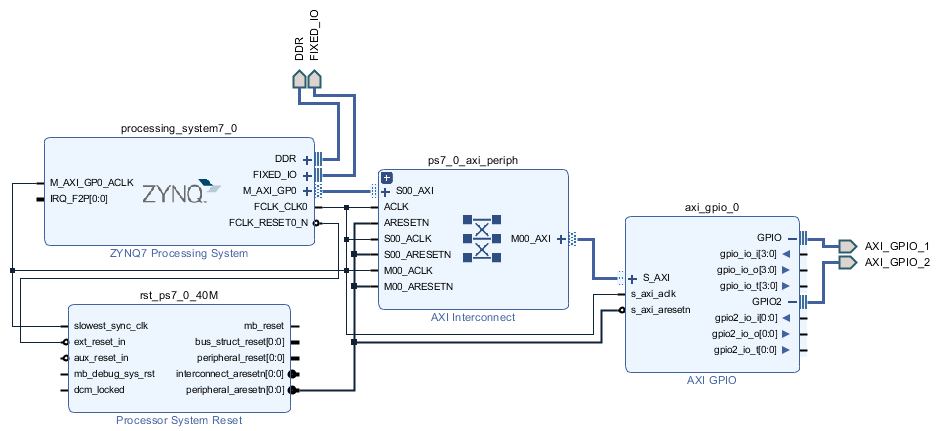
Vivado Block Diagram如下:
ad936x_spi.c
#include "stdio.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xgpio.h"
#include "ad9363_spi.h"
XGpioPs gpiops_inst; //PS 端 GPIO 驱动实例
XGpioPs_Config *gpiops_cfg_ptr; //PS 端 GPIO 配置信息
XGpio axi_gpio1_inst; //PL 端 AXI GPIO1 驱动实例
XGpio axi_gpio2_inst; //PL 端 AXI GPIO2 驱动实例
void PS_AXI_GPIO_Init(void)
{
//初始化 PS GPIO
gpiops_cfg_ptr = XGpioPs_LookupConfig(GPIOPS_ID);
XGpioPs_CfgInitialize(&gpiops_inst, gpiops_cfg_ptr, gpiops_cfg_ptr->BaseAddr);
//初始化 PL AXI_GPIO
XGpio_Initialize(&axi_gpio1_inst, AXI_GPIO_ID);
XGpio_Initialize(&axi_gpio2_inst, AXI_GPIO_ID);
//配置 PS GPIO
XGpioPs_SetDirectionPin(&gpiops_inst, MIO_LED, 1); //设置 PS GPIO 为输出
XGpioPs_SetOutputEnablePin(&gpiops_inst, MIO_LED, 1); //使能 LED 输出
PS_LED_H;
//配置PL AXI_GPIO
XGpio_SetDataDirection(&axi_gpio1_inst, 1, 0); //设置 AXI GPIO 通道 1 为输出
XGpio_SetDataDirection(&axi_gpio2_inst, 2, 1); //设置 AXI GPIO 通道 2 为输入
SPI_SCLK_L;
SPI_MOSI_L;
SPI_CS_H;
RESET_H;
}
void ad9363_SPI_Write(u16 addr, u8 data)
{
SPI_CS_L;
ad9363_SPI_Write_Byte((u8)(addr>>8)+0x80);
ad9363_SPI_Write_Byte((u8)(addr));
ad9363_SPI_Write_Byte(data);
SPI_CS_H;
SPI_MOSI_L;
}
void ad9363_SPI_Write_Byte(u8 wdata)
{
u8 i = 0;
for( i = 0; i< 8; i++){
SPI_SCLK_H;
if(wdata&0x80)
SPI_MOSI_H;
else
SPI_MOSI_L;
SPI_SCLK_L;
SPI_MOSI_L;
wdata <<= 1;
}
}
u8 ad9363_SPI_Read(u16 addr)
{
u8 rdata;
SPI_CS_L;
ad9363_SPI_Write_Byte((u8)(addr>>8));
ad9363_SPI_Write_Byte((u8)(addr));
rdata = ad9363_SPI_Read_Byte();
SPI_CS_H;
return rdata;
}
u8 ad9363_SPI_Read_Byte(void)
{
u8 i;
u8 rdata;
for(i = 0; i<8; i++){
SPI_SCLK_H;
SPI_SCLK_L;
if(XGpio_DiscreteRead(&axi_gpio2_inst, 2)&0x00001)
rdata |= 0x80>>i;
}
return rdata;
}
void ps_LED(u8 status)
{
if(status)
PS_LED_H;
else
PS_LED_L;
}
ad936x_spi.h
#ifndef SRC_AD9363_SPI_AD9363_SPI_H_
#define SRC_AD9363_SPI_AD9363_SPI_H_
#include "stdio.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xgpio.h"
#define GPIOPS_ID XPAR_XGPIOPS_0_DEVICE_ID //PS 端 GPIO 器件 ID
#define AXI_GPIO_ID XPAR_AXI_GPIO_0_DEVICE_ID //PL 端 AXI GPIO 器件 ID
//PS GPIO
#define MIO_LED 15 //PS LED 连接到 MIO0
//Channel 1 输出
#define SPI_SCLK_Pins 0 //PL SPI SCLK GPIO 通道1
#define SPI_MOSI_Pins 1
#define SPI_CS_Pins 2
#define RESET_Pins 3
//Channel 2 输入
#define SPI_MISO_Pins 1
//PS GPIO 输出
#define PS_LED_H XGpioPs_WritePin(&gpiops_inst, MIO_LED, 1)
#define PS_LED_L XGpioPs_WritePin(&gpiops_inst, MIO_LED, 0)
//通道1 GPIO 输出
#define SPI_SCLK_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<SPI_SCLK_Pins))
#define SPI_SCLK_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<SPI_SCLK_Pins)))
#define SPI_MOSI_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<SPI_MOSI_Pins))
#define SPI_MOSI_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<SPI_MOSI_Pins)))
#define SPI_CS_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<SPI_CS_Pins))
#define SPI_CS_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<SPI_CS_Pins)))
#define RESET_H XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)|(0x0001<<RESET_Pins))
#define RESET_L XGpio_DiscreteWrite(&axi_gpio1_inst, 1, XGpio_DiscreteRead(&axi_gpio1_inst, 1)&(~(0x0001<<RESET_Pins)))
//通道2 GPIO 输入
//#define SPI_MISO_H XGpio_DiscreteWrite(&axi_gpio2_inst, 2, XGpio_DiscreteRead(&axi_gpio2_inst, 2)|(0x0001<<SPI_MISO_Pins))
//#define SPI_MISO_L XGpio_DiscreteWrite(&axi_gpio2_inst, 2, XGpio_DiscreteRead(&axi_gpio2_inst, 2)&(~(0x0001<<SPI_MISO_Pins)))
void PS_AXI_GPIO_Init(void);
void ad9363_SPI_Write(u16 addr, u8 data);
void ad9363_SPI_Write_Byte(u8 wdata);
u8 ad9363_SPI_Read(u16 addr);
u8 ad9363_SPI_Read_Byte(void);
void ps_LED(u8);
#endif /* SRC_AD9363_SPI_AD9363_SPI_H_ */
AXI-Quad-SPI(待测试)
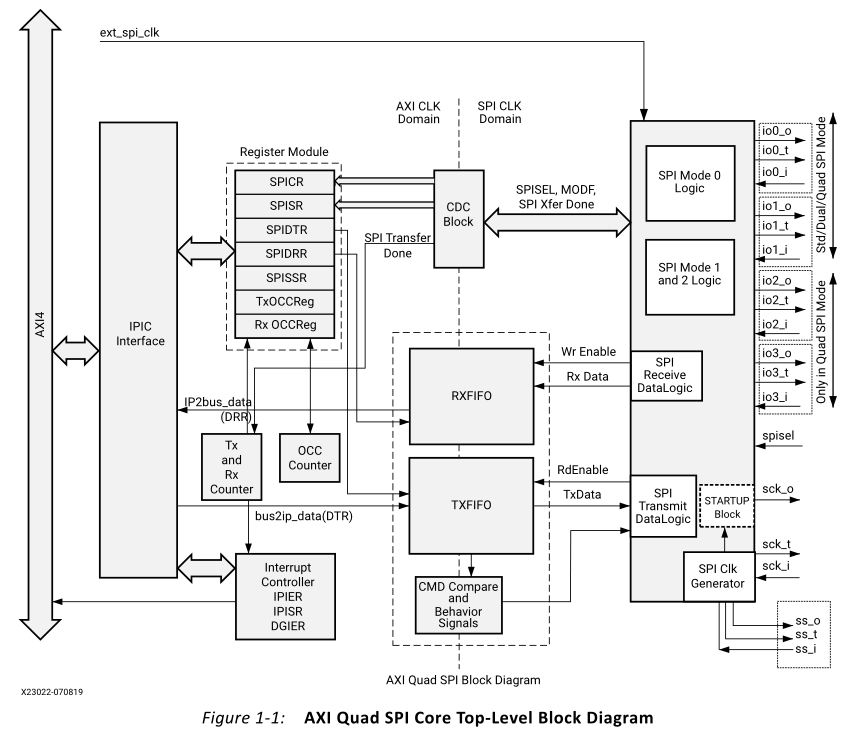
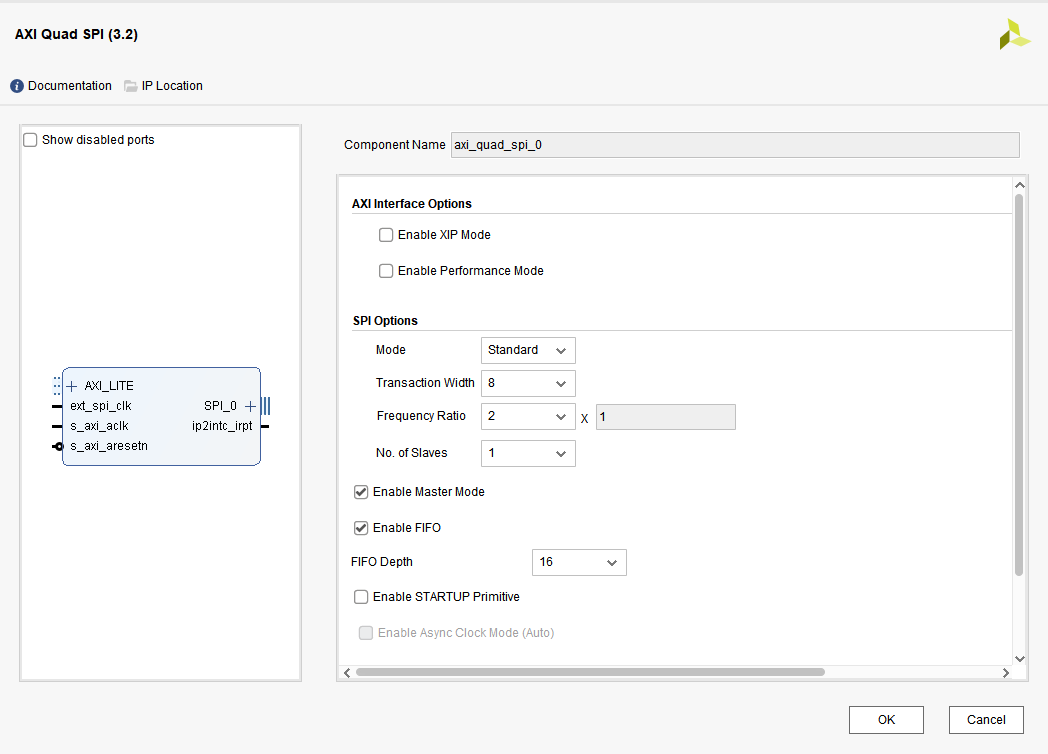
测试工程待写。