常用的仿真器
nvidia 场景非常真实,收费
物理仿真比较好,渲染差一点
为什么用仿真器,因为比较穷
gazebo与ros集成的比较好,有很多插件,机器人开发
刚体仿真器
ode

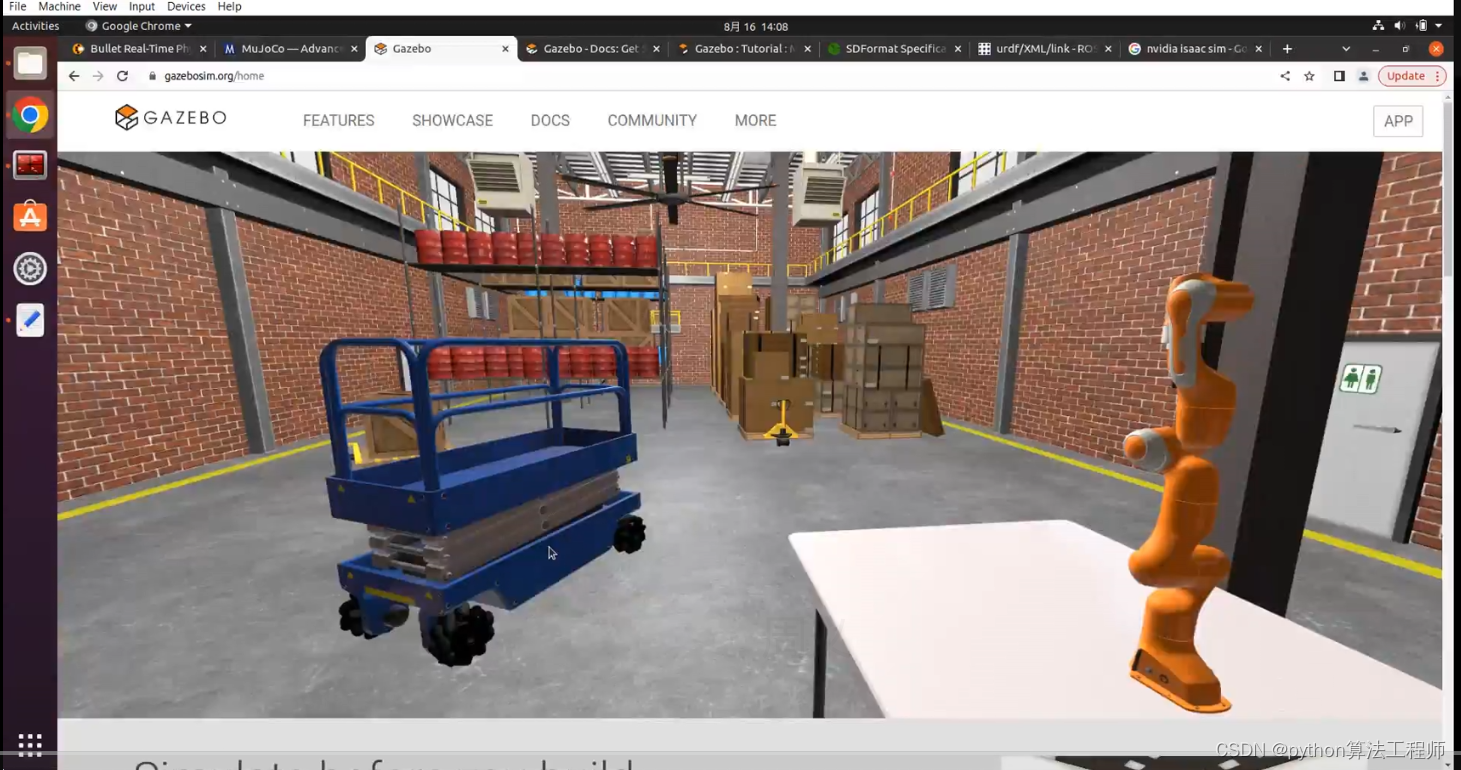
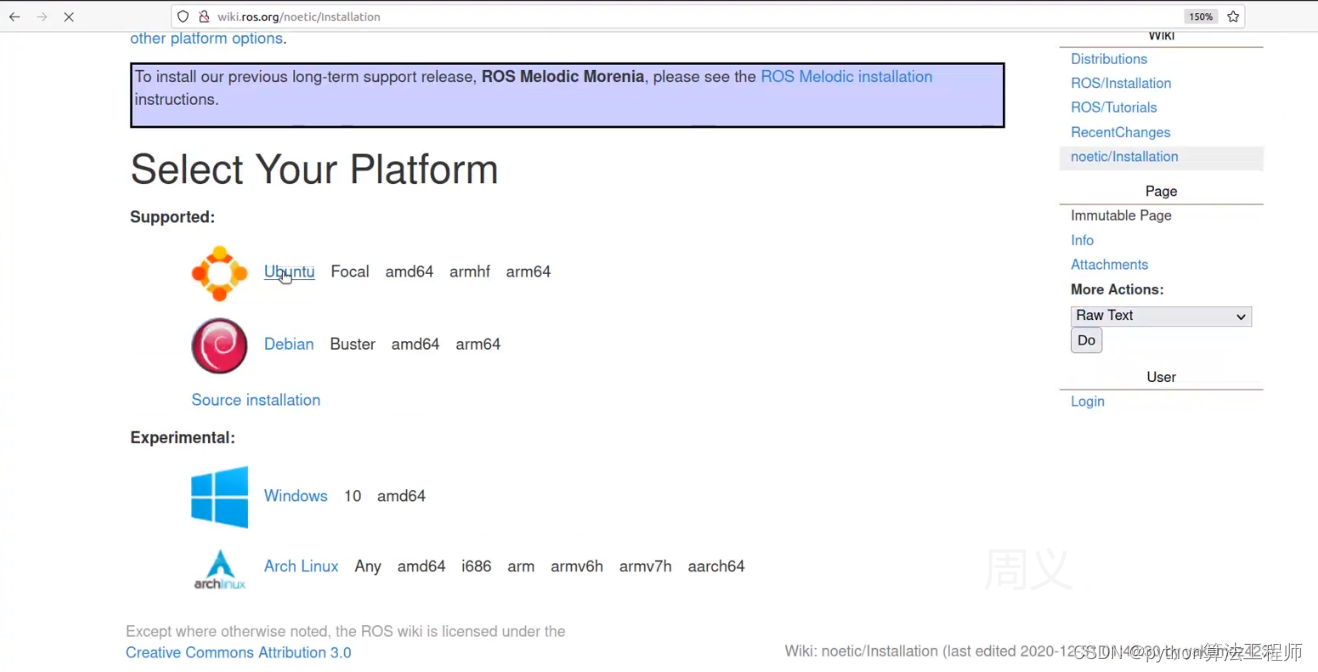
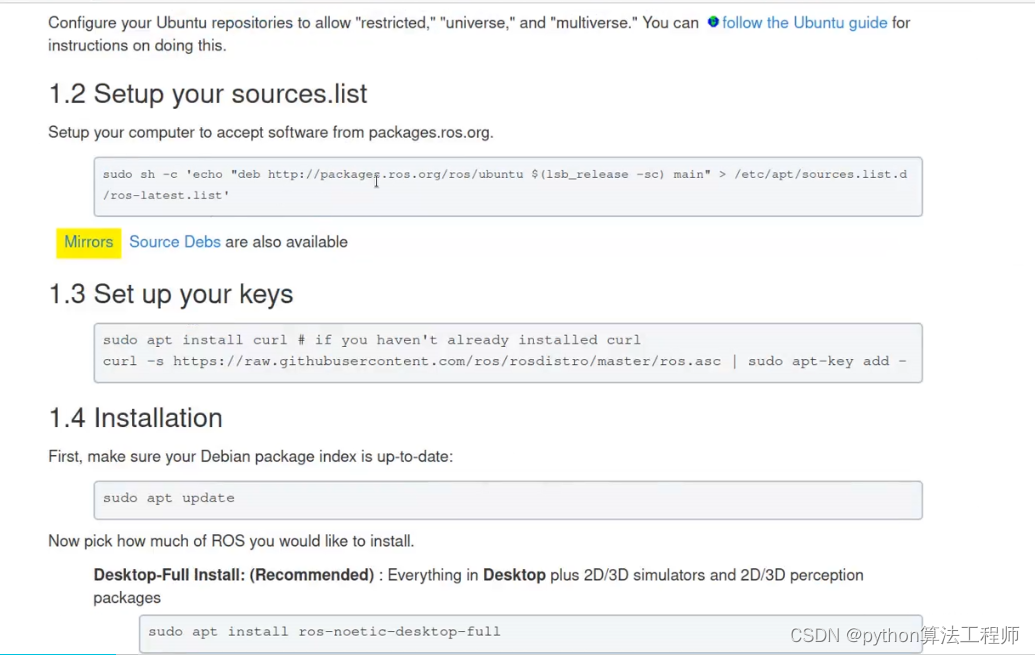
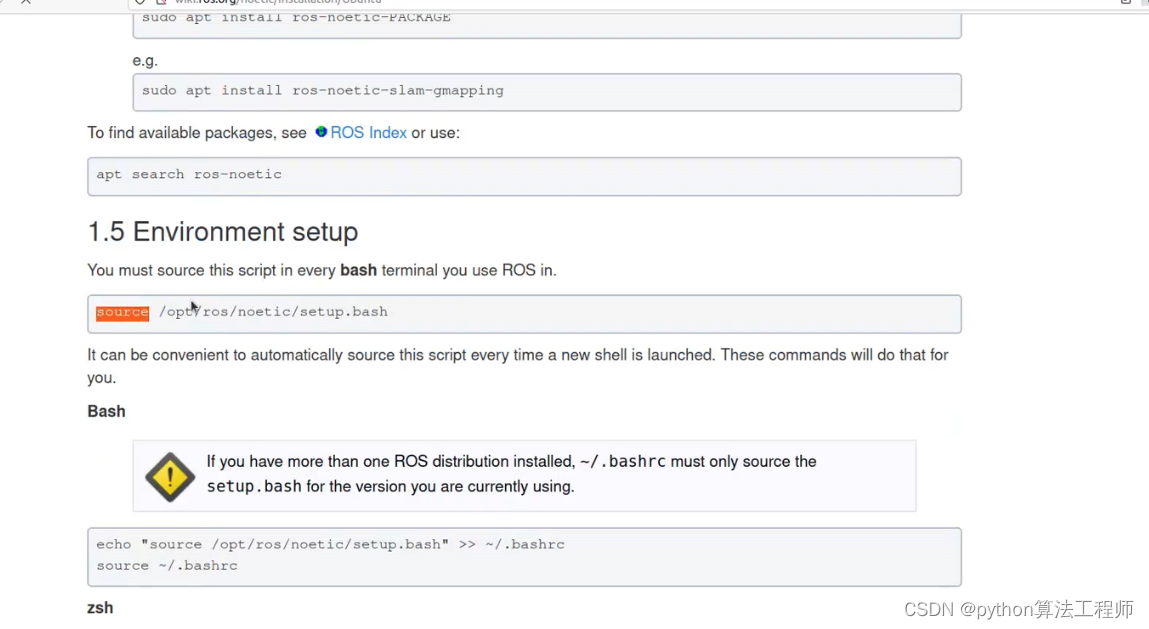
安装gazebo
 ros自带
ros自带
机器人算法开发与验证
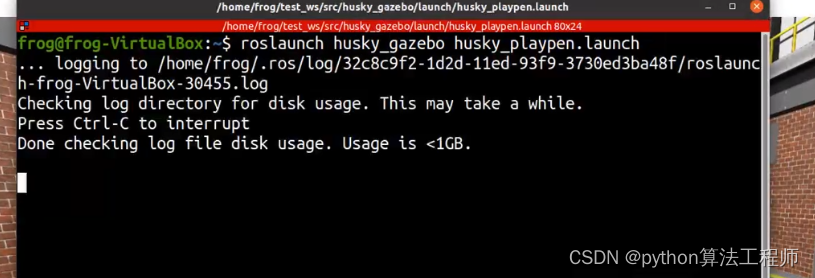
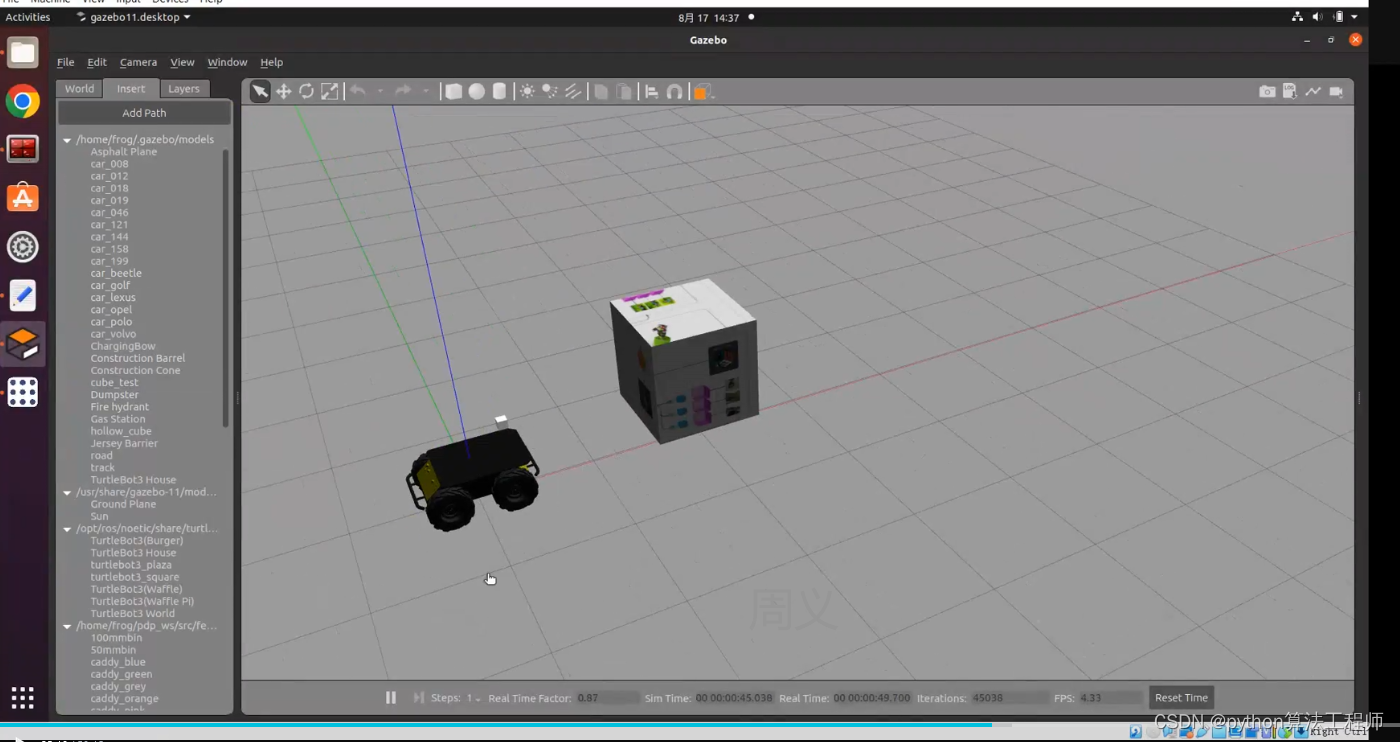
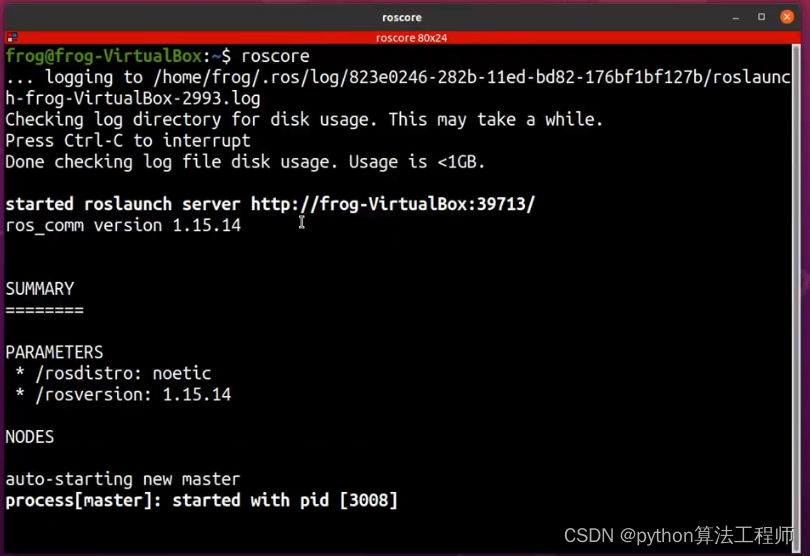
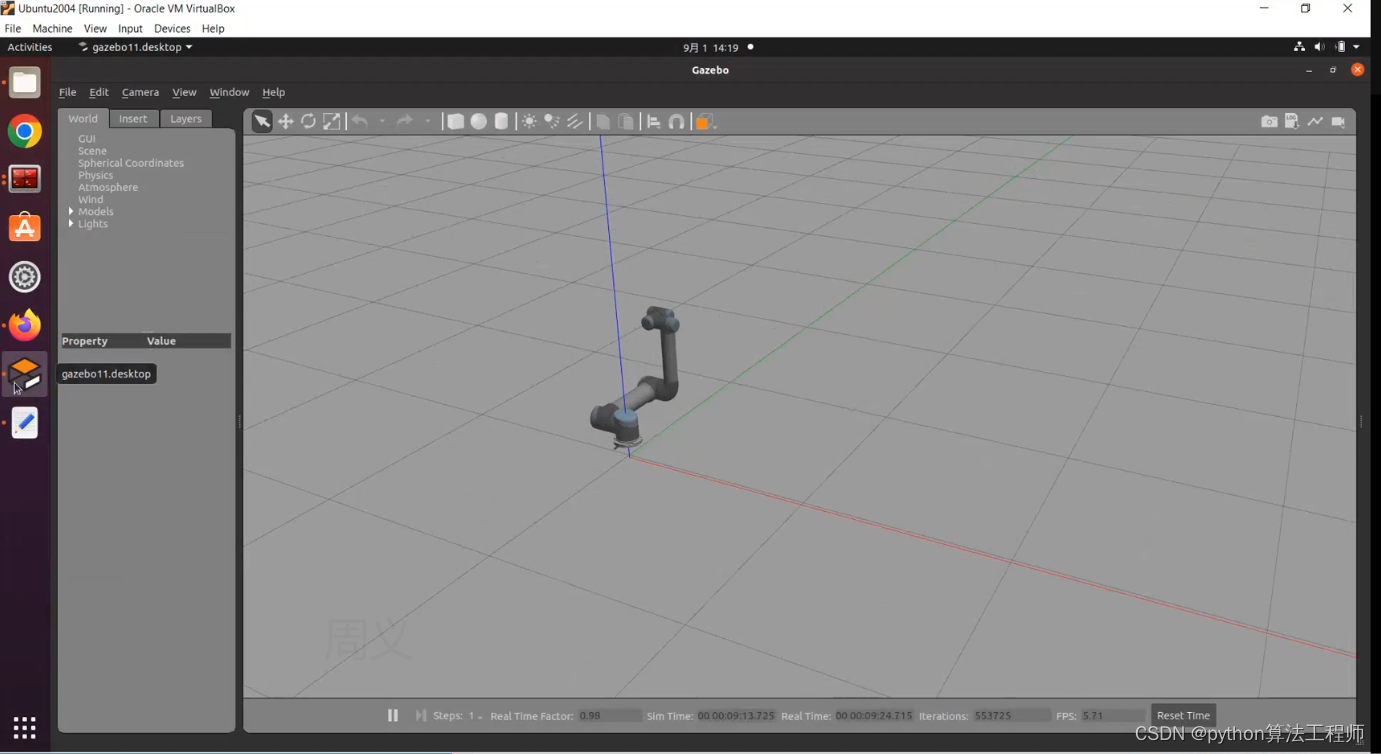
打开gazebo gazbon界面
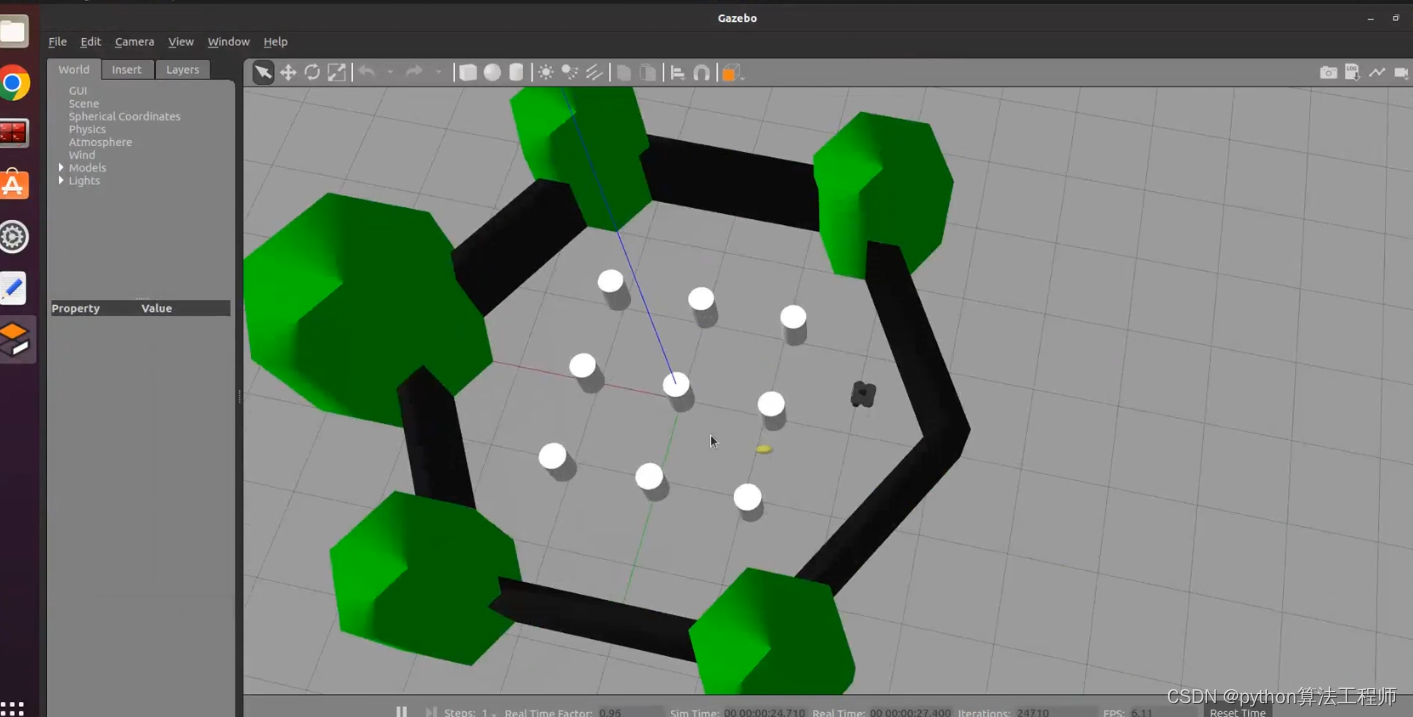
gazbon界面
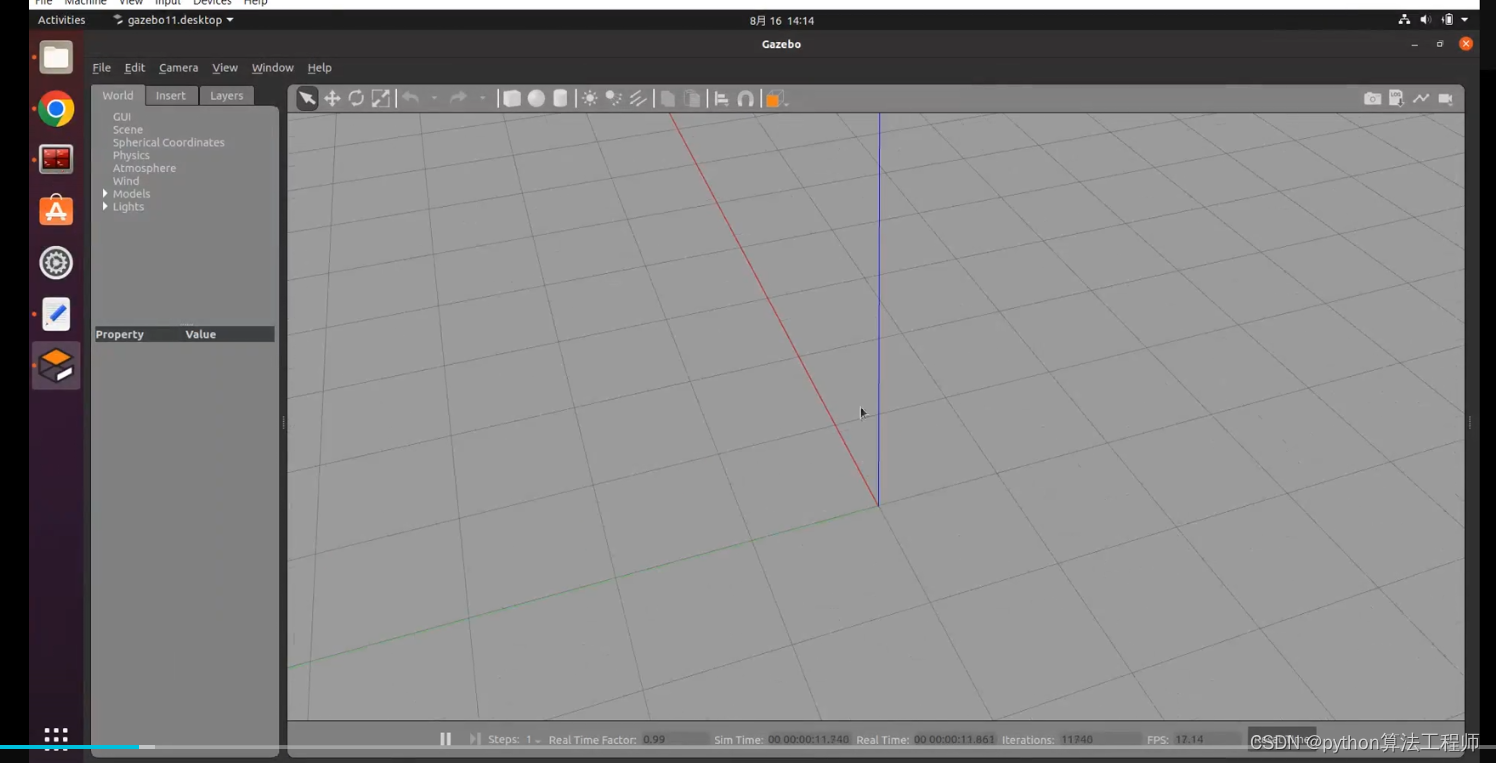 红色的是x轴,蓝色的是z轴,绿色的是y轴
红色的是x轴,蓝色的是z轴,绿色的是y轴
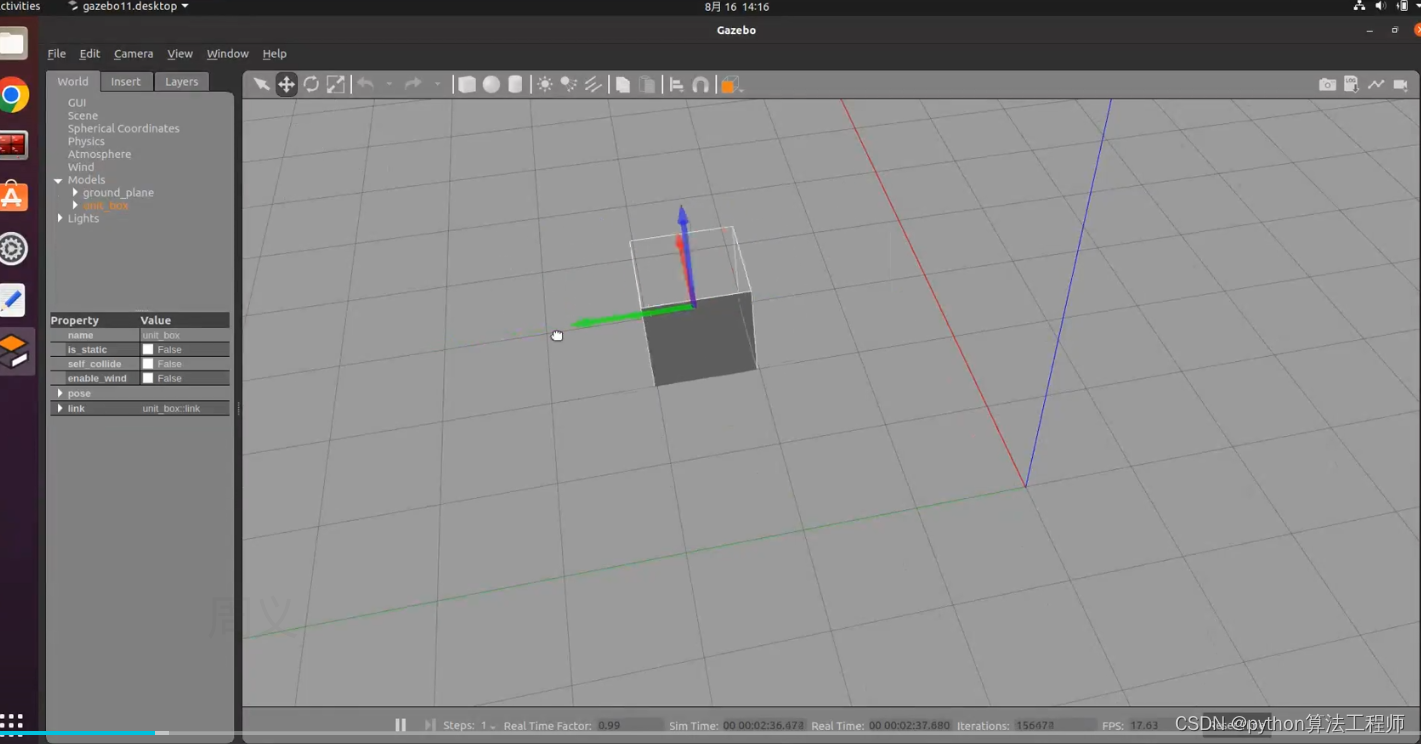
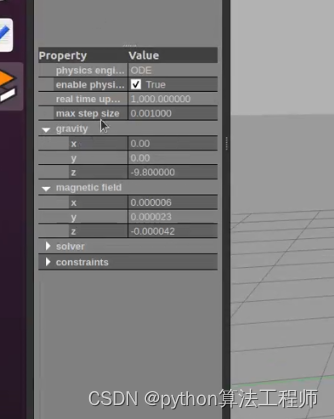
 物理引擎,重力,碰撞
物理引擎,重力,碰撞
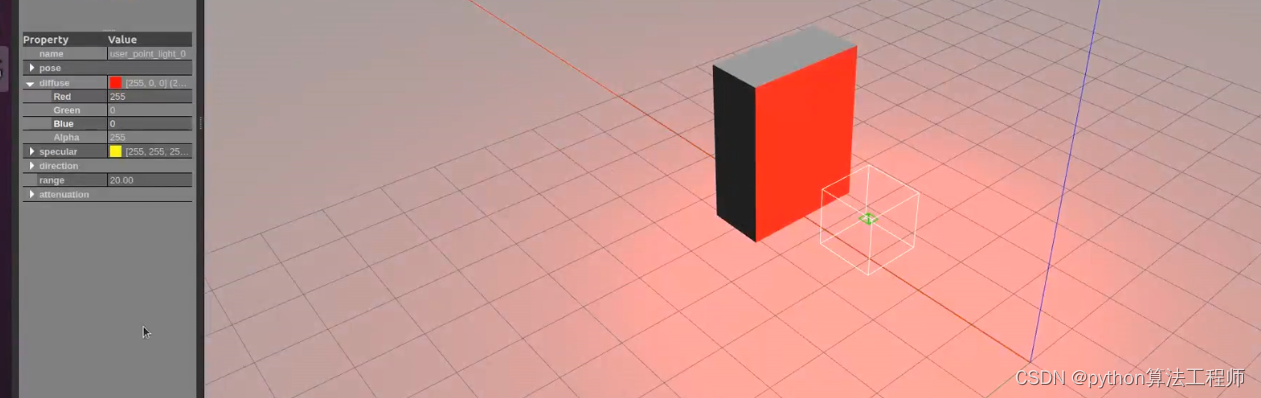
 光照
光照
 仿真器每秒一千次计算动力学特性
仿真器每秒一千次计算动力学特性
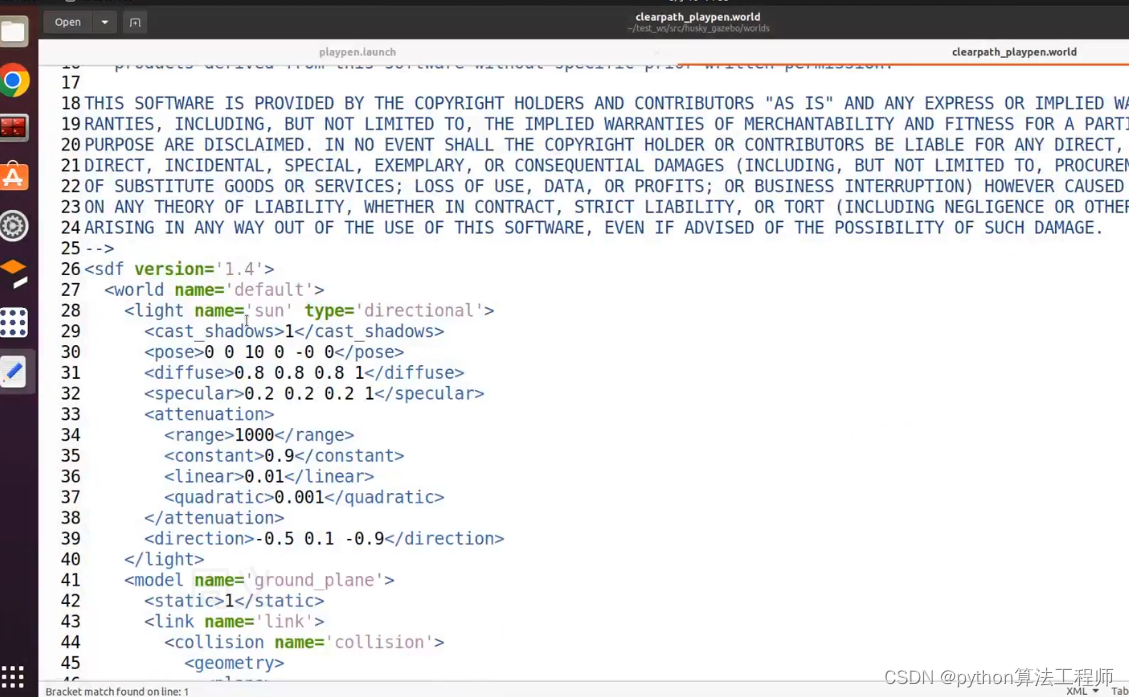
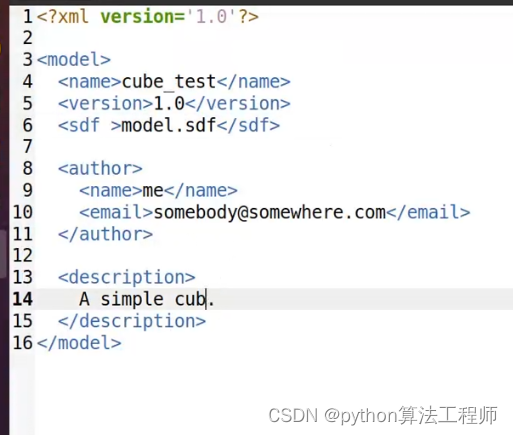
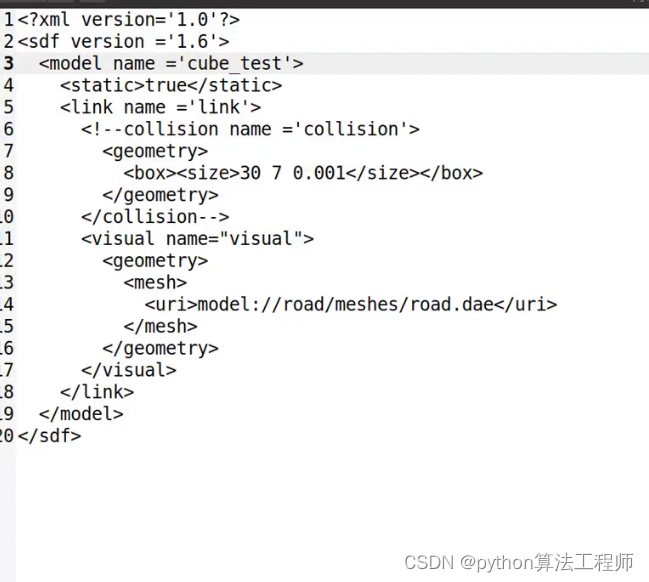
模型可以保存为xml格式
可以自己创建模型
 模型目录
模型目录
可以网上下载模型
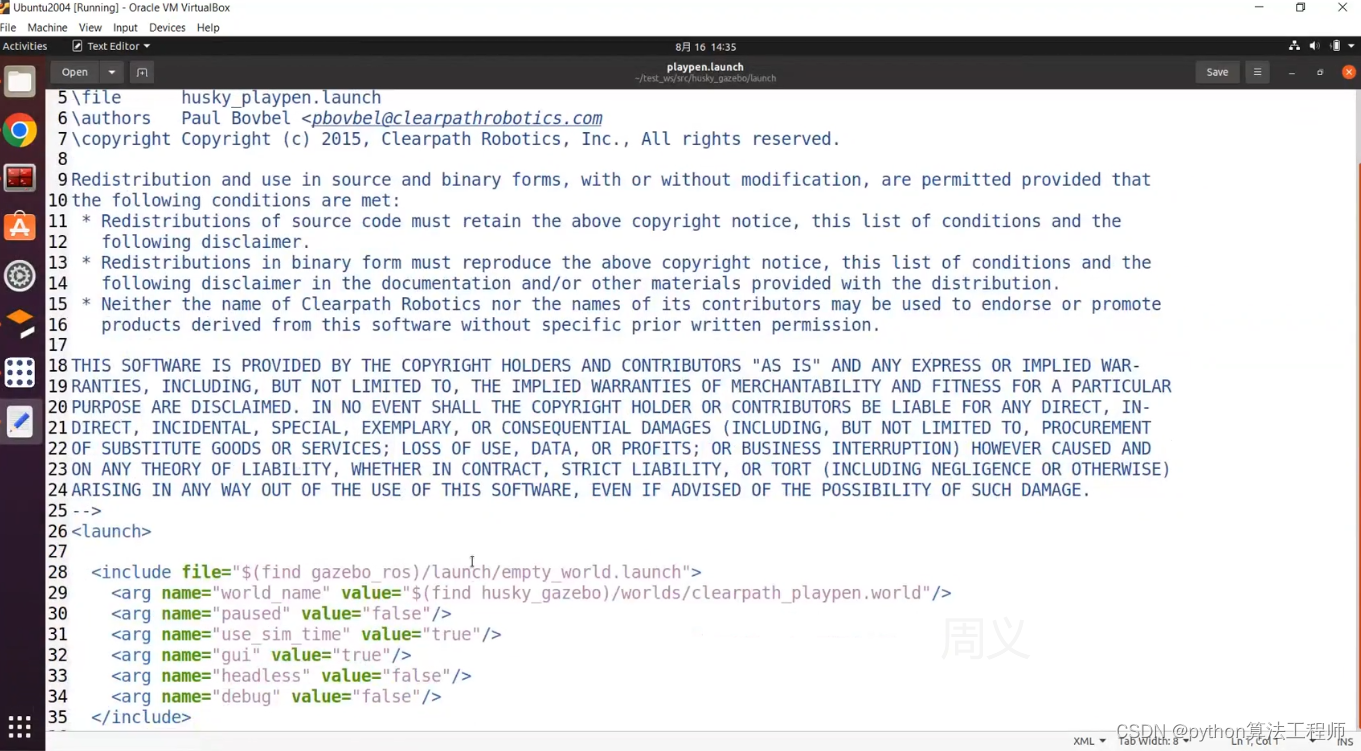
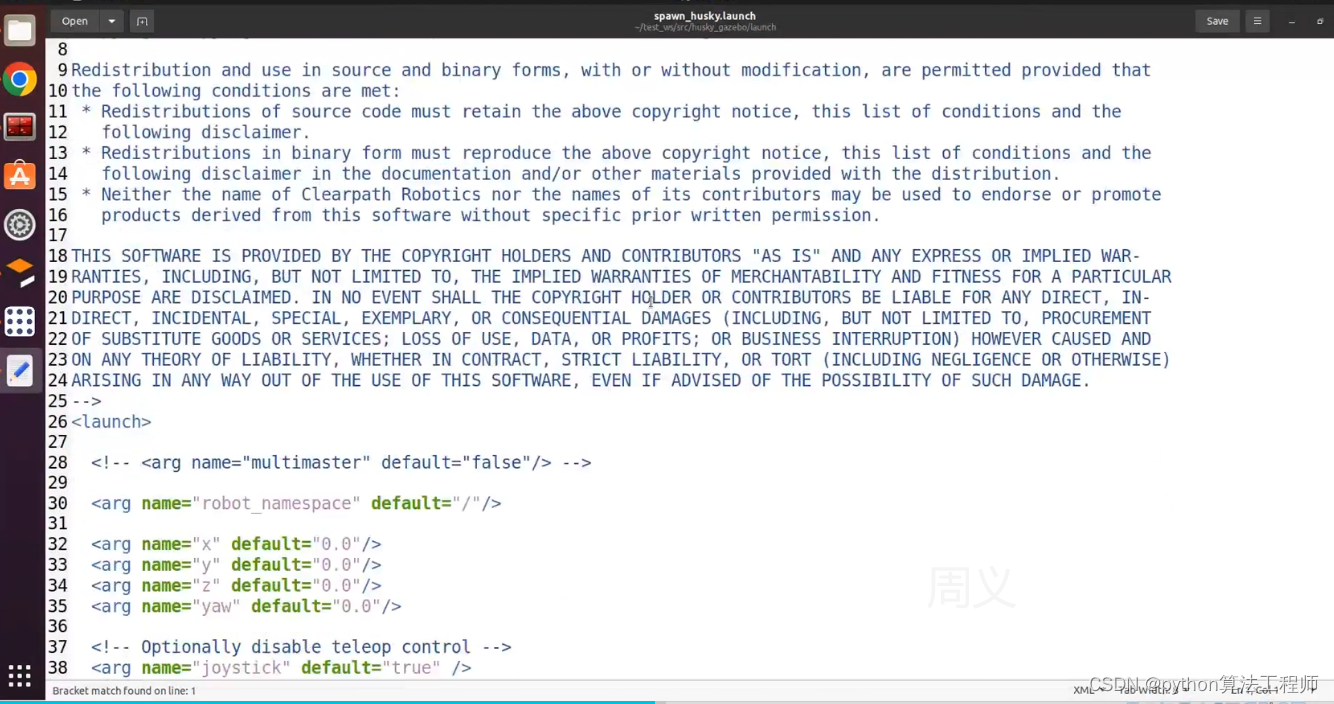
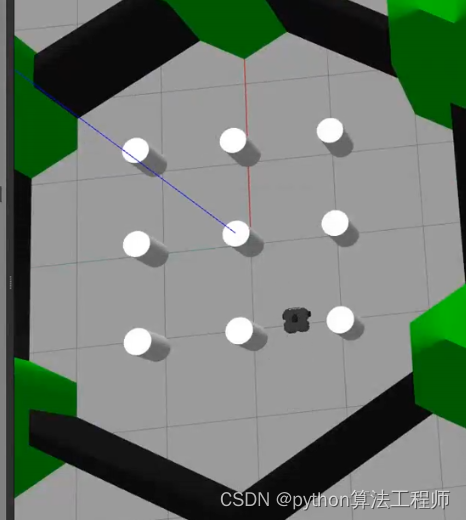
场景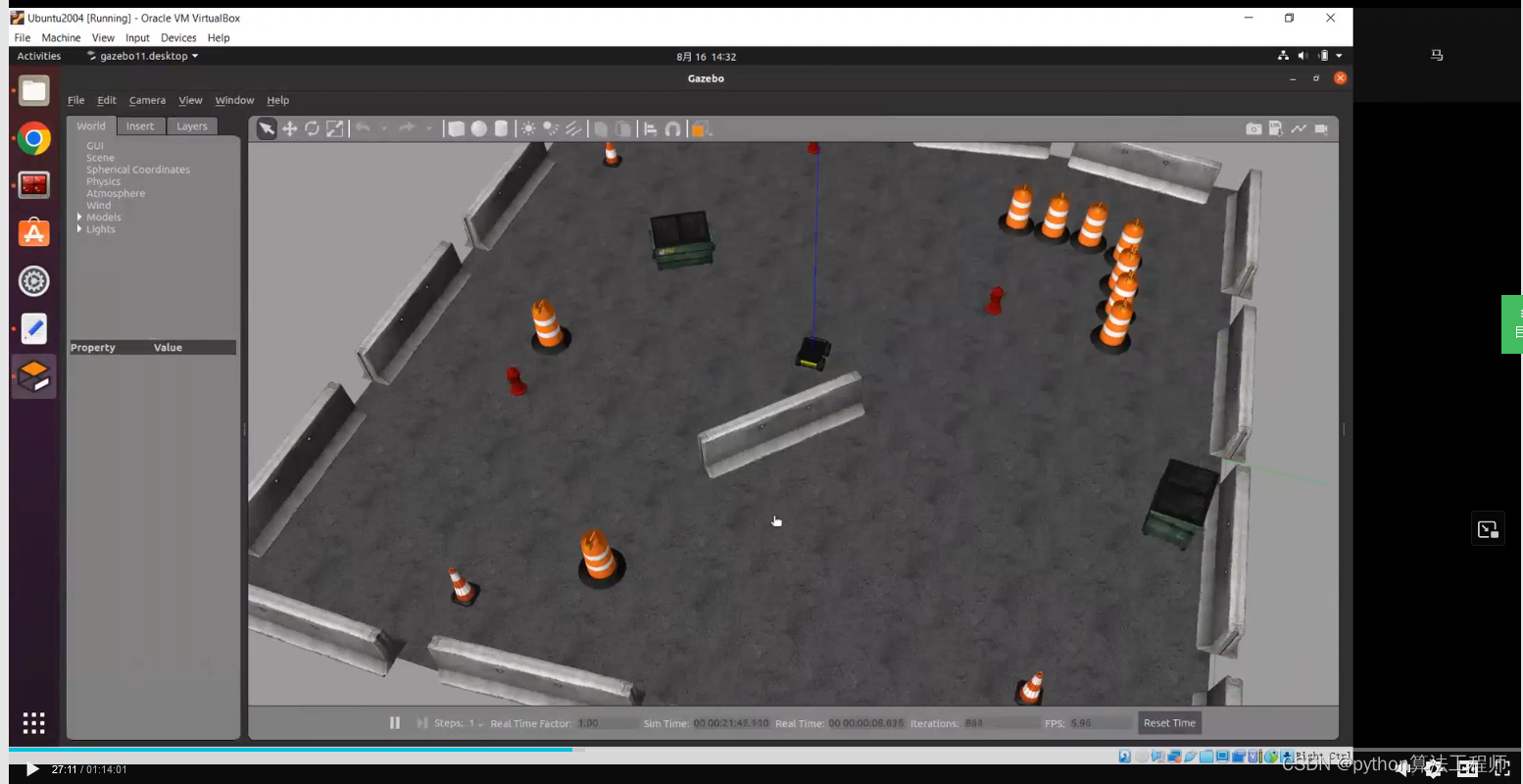 机器人
机器人
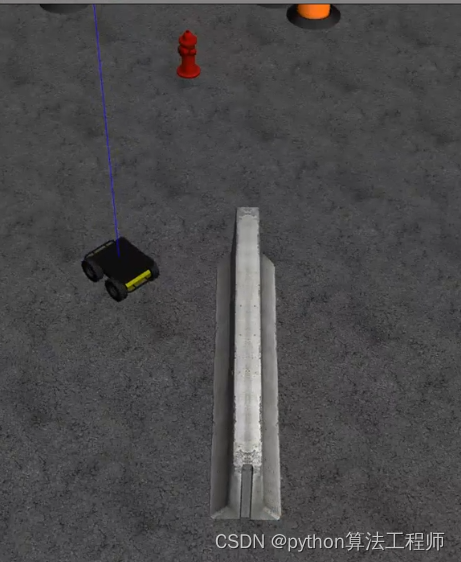
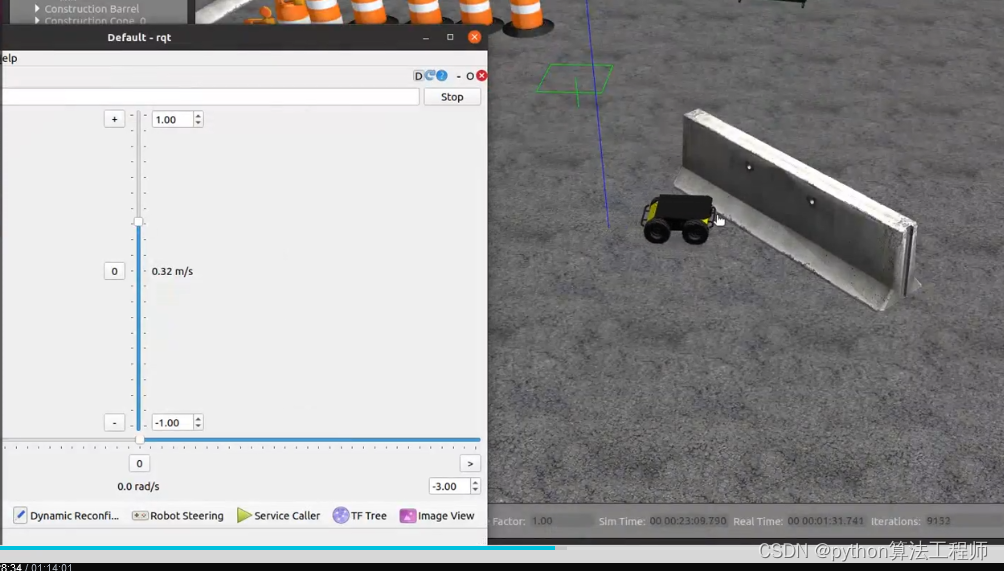
控制机器人
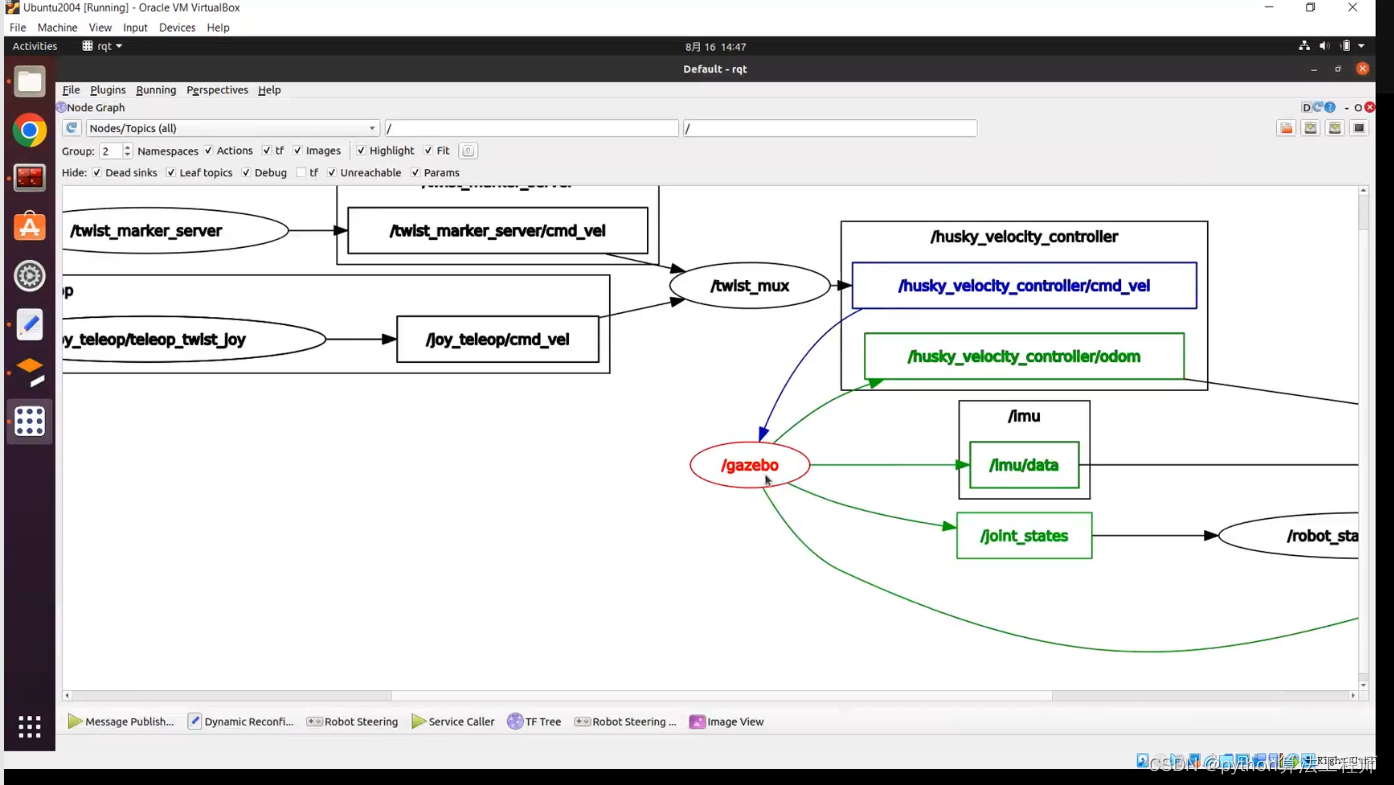
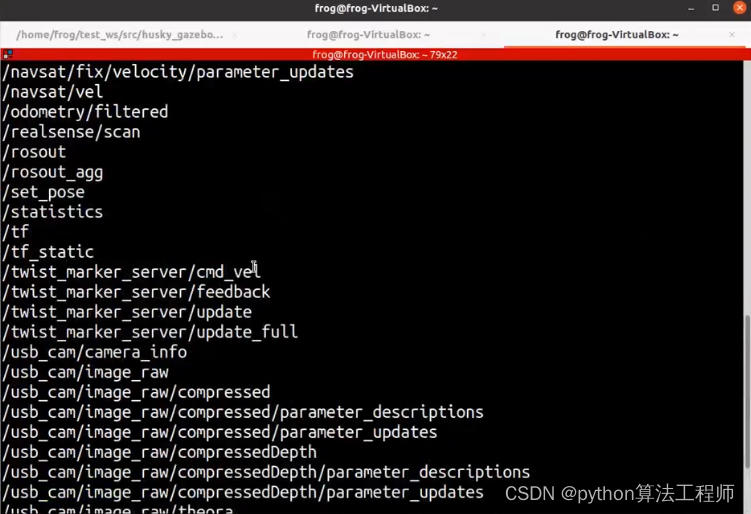
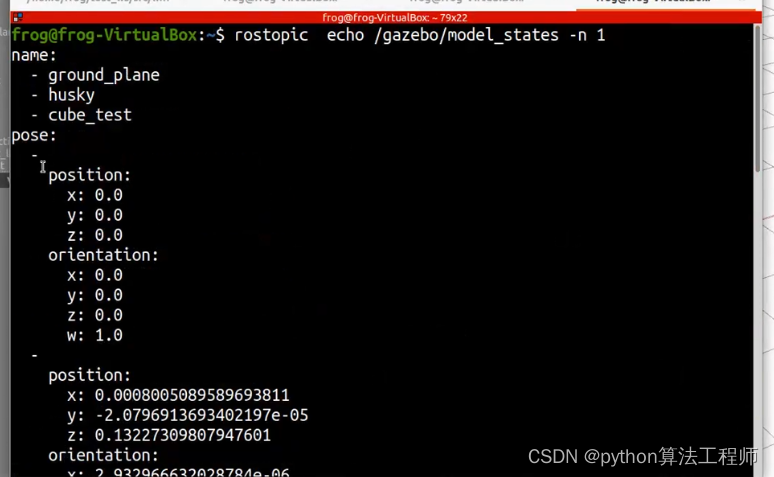
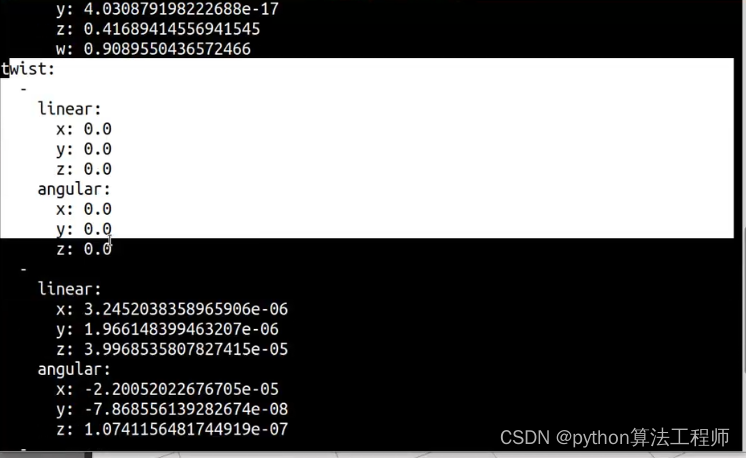
 ros和gazebo如何进行交互得?
ros和gazebo如何进行交互得?
在 ROS(Robot Operating System)和 Gazebo 之间进行交互,可以通过以下方法实现:
-
在 Gazebo 中加载 ROS 插件:使用 Gazebo 提供的插件系统,加载 ROS 插件,将 Gazebo 和 ROS 进行连接。ROS 插件通常使用 ROS 提供的
gazebo_ros_pkgs包提供,可以通过apt-get或源码安装。 -
在 ROS 中加载 Gazebo 插件:使用 ROS 提供的插件系统,加载 Gazebo 插件,将 ROS 和 Gazebo 进行连接。Gazebo 插件通常使用 Gazebo 提供的
gazebo_plugins插件提供,可以通过apt-get或源码安装。 -
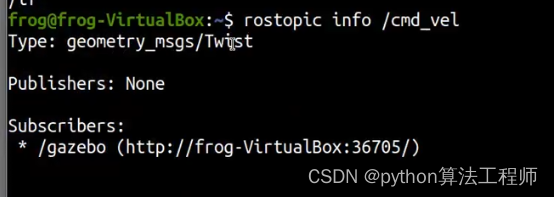
在 ROS 中发布控制指令:通过在 ROS 中发布控制指令,来控制 Gazebo 中的模型。可以使用 ROS 提供的消息类型,例如
geometry_msgs/Twist,也可以自定义消息类型。 -
在 Gazebo 中接收控制指令:通过在 Gazebo 中加载 ROS 插件,接收 ROS 中发布的控制指令,并将其转换为 Gazebo 中的模型控制指令。可以使用 Gazebo 提供的
ros::Subscriber类和gazebo::physics::Model类,分别订阅控制指令和控制模型。 -
在 Gazebo 中发布传感器数据:通过在 Gazebo 中模拟传感器并将传感器数据发布到 ROS 中,来模拟真实环境中的传感器数据。可以使用 Gazebo 提供的传感器模型和 ROS 提供的消息类型,例如
sensor_msgs/Image和sensor_msgs/LaserScan,也可以自定义消息类型。 -
在 ROS 中接收传感器数据:通过在 ROS 中加载 Gazebo 插件,接收 Gazebo 中模拟的传感器数据,并进行处理。可以使用 ROS 提供的消息类型,例如
sensor_msgs/Image和sensor_msgs/LaserScan,也可以自定义消息类型。
需要注意的是,ROS 和 Gazebo 之间的交互是异步的,即 ROS 发布的消息和 Gazebo 接收的消息之间可能存在延迟。为了保证交互的实时性和准确性,需要根据具体的需求和应用场景进行相应的配置和调整。
以上是 ROS 和 Gazebo 进行交互的基本方法。在实际应用中,还需要根据具体的需求和应用场景进行相应的配置和调整。可以参考 ROS 和 Gazebo 的官方文档和相关教程,了解更详细的信息。
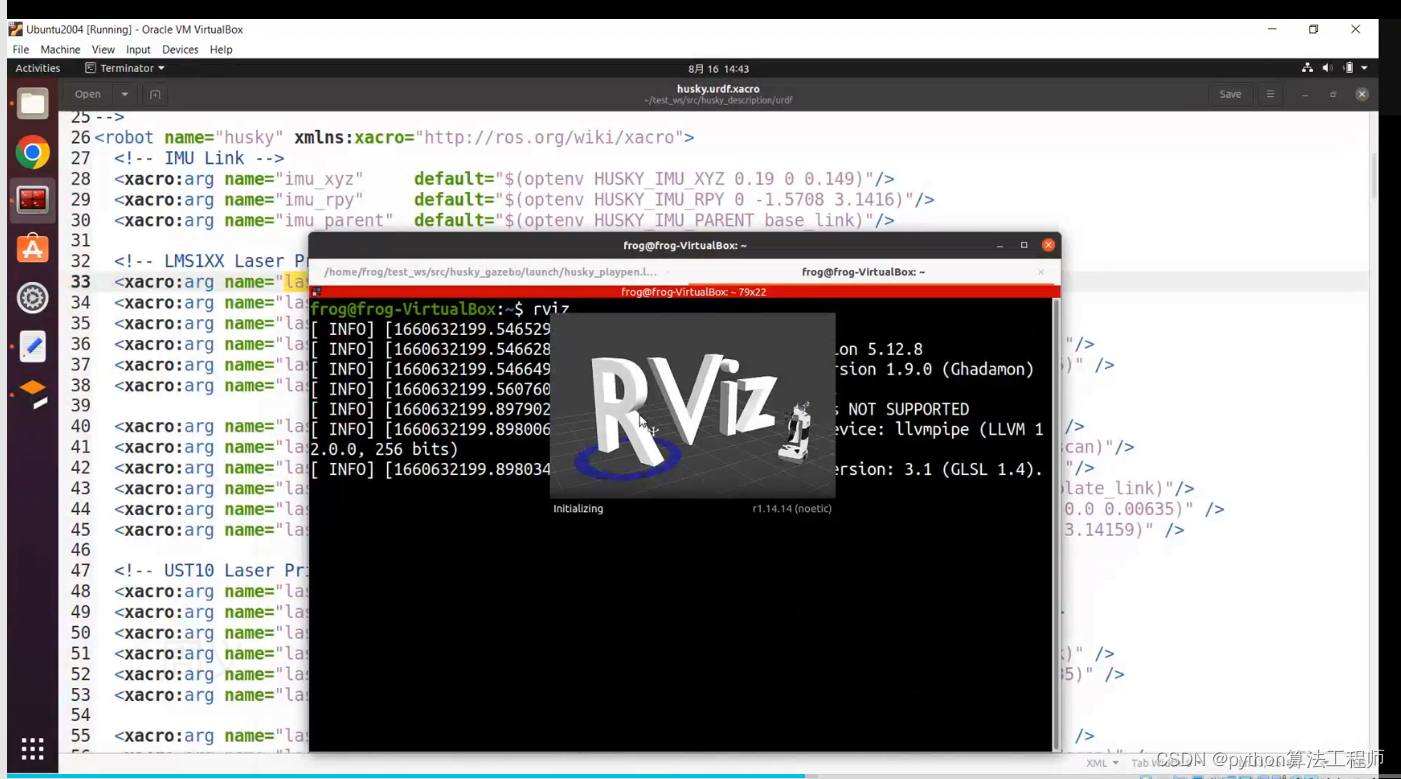
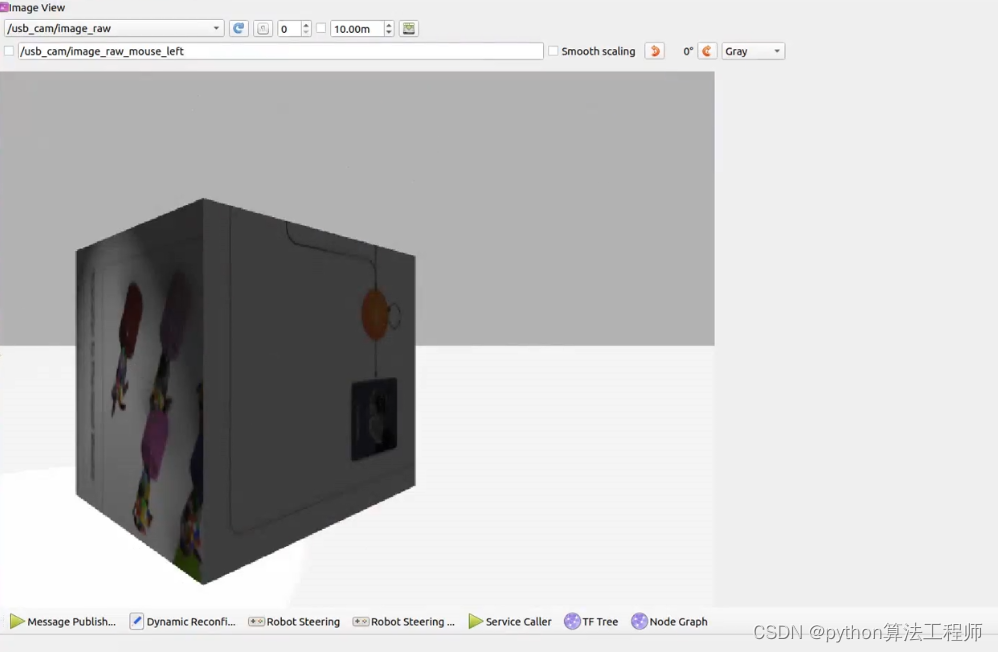
可视化传感器信息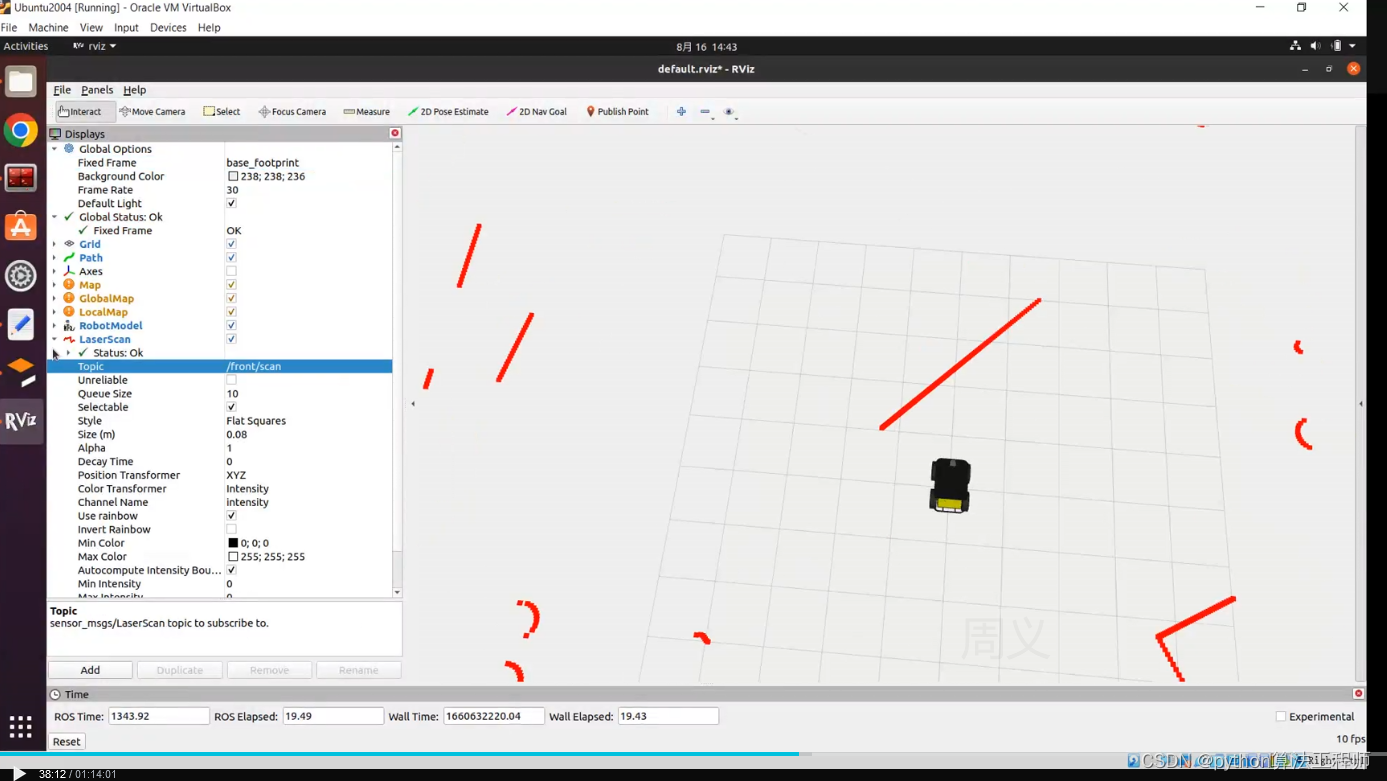
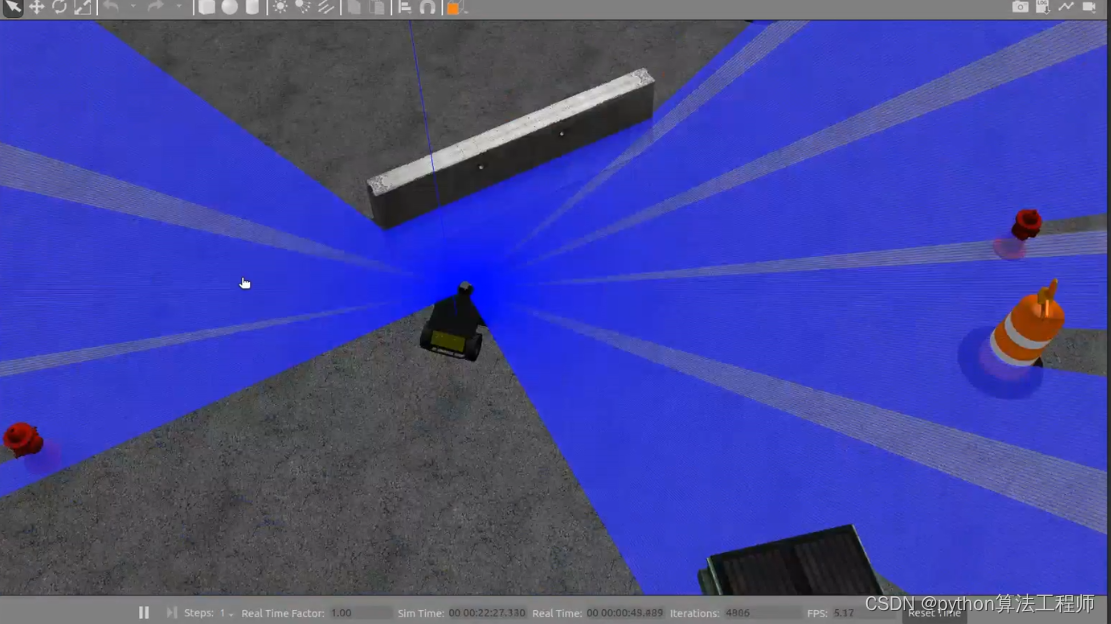
 gazebo可以向外发布一些传感器数据,而且可以接受一些控制命令
gazebo可以向外发布一些传感器数据,而且可以接受一些控制命令
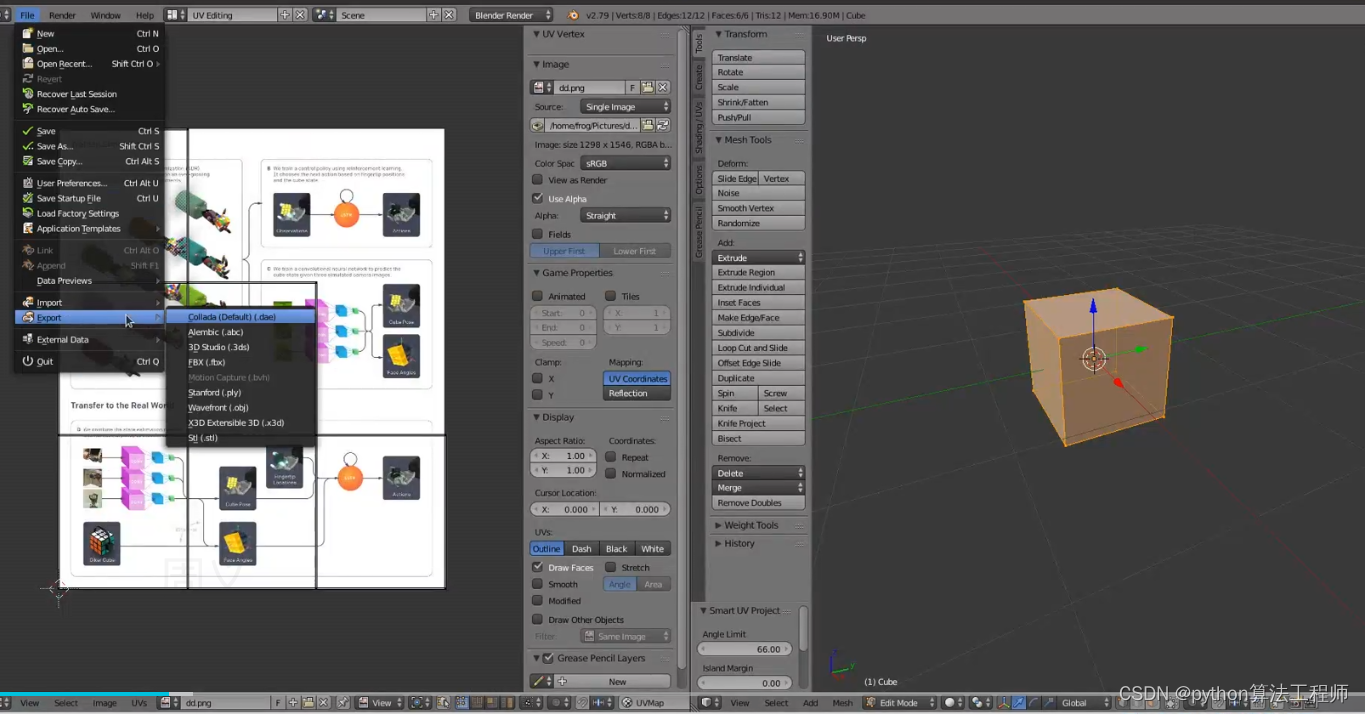
blender
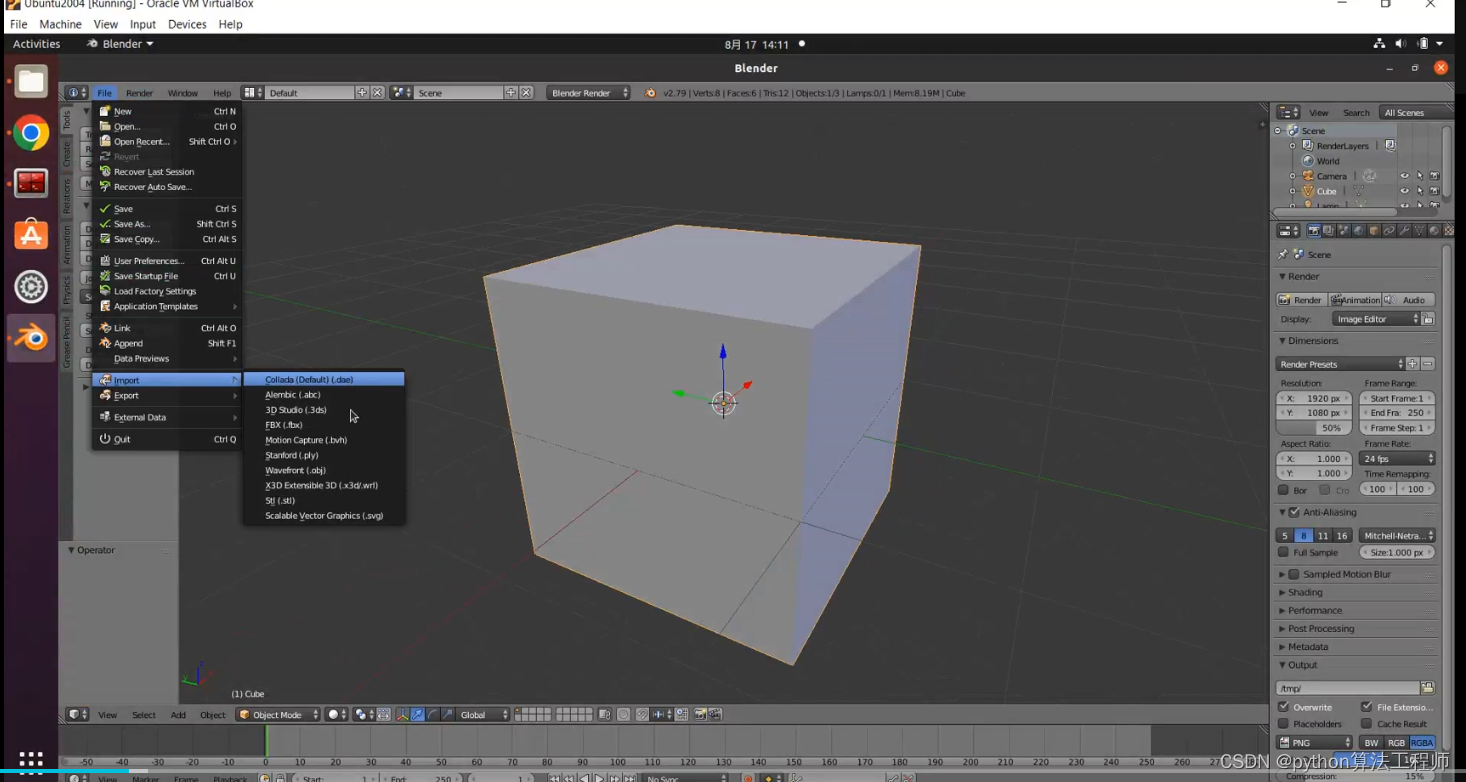 贴图
贴图
编辑模式
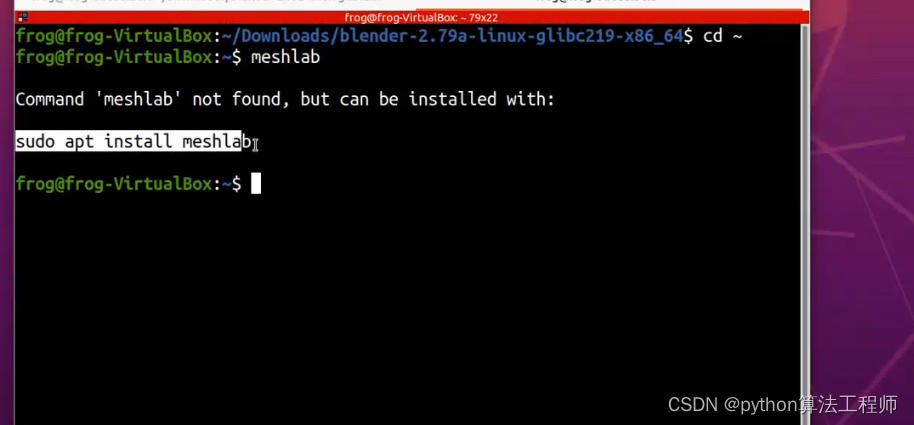
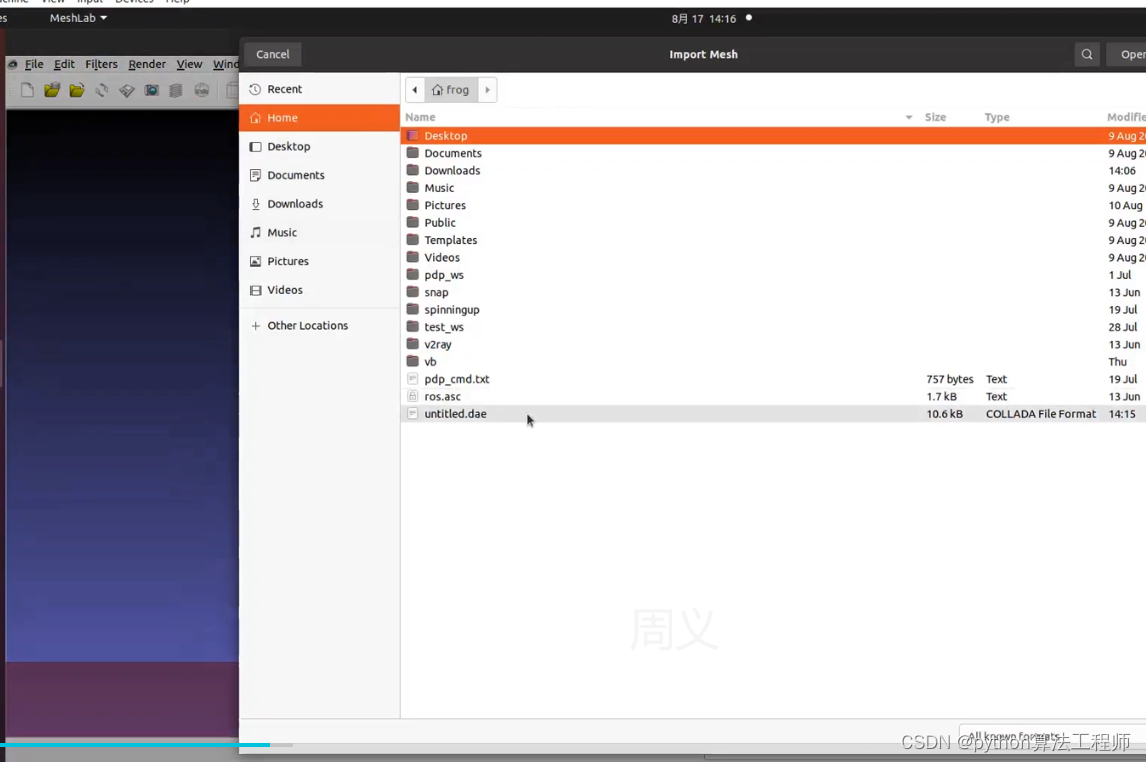
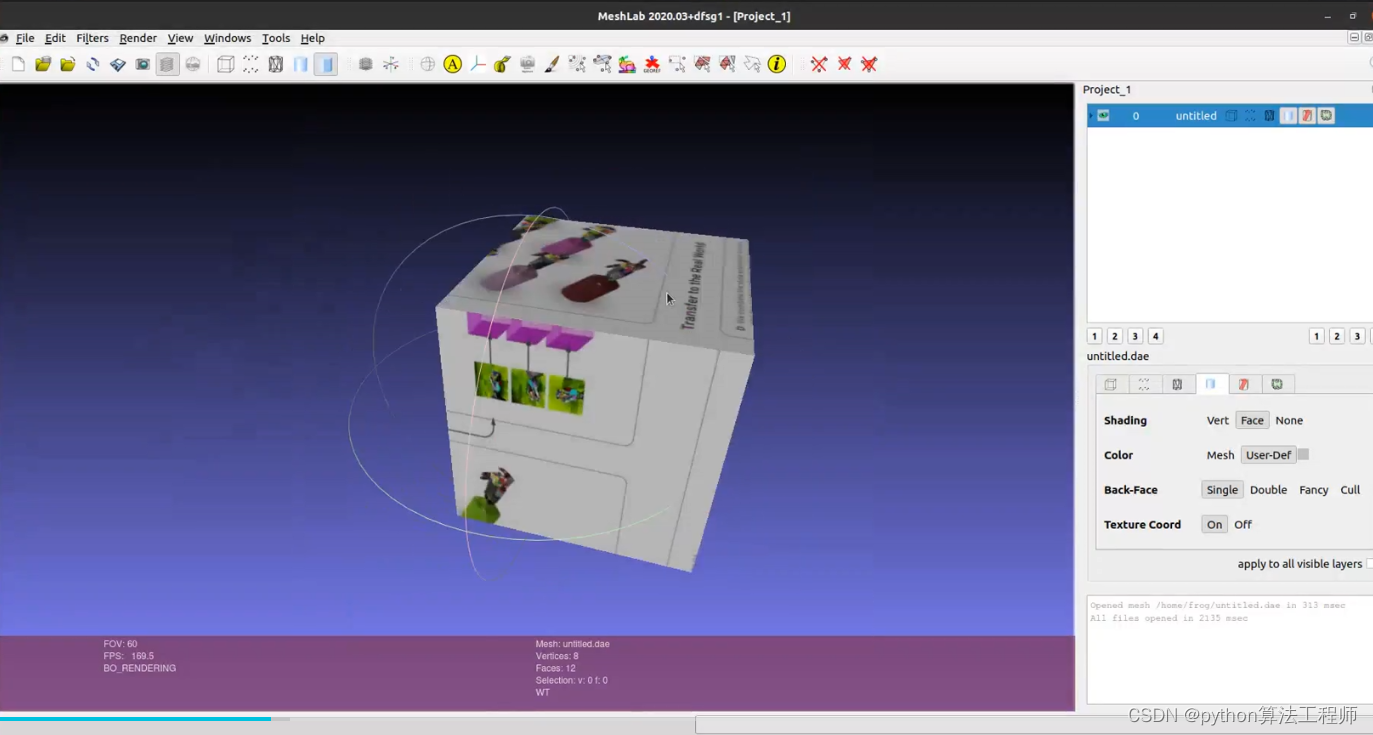
meshlab是什么
MeshLab是一款免费的开源3D网格处理软件,可以用于处理、编辑和修复3D网格模型。它支持多种3D文件格式,包括STL、PLY、OBJ、OFF、3DS、VRML、U3D、X3D和COLLADA等。MeshLab提供了丰富的3D模型处理工具,可以进行网格滤波、重构、切割、平滑、修复、测量、纹理映射等操作,还可以进行3D模型的可视化、分析和比较等。
MeshLab的功能非常强大,适用于各种3D网格模型的处理和编辑,例如数字造型、计算机辅助设计、计算机图形学、虚拟现实、游戏开发等领域。MeshLab还提供了许多插件和扩展程序,可以进一步拓展其功能和应用范围。
MeshLab的界面简洁、易用,支持多语言,适用于不同操作系统,例如Windows、Mac和Linux等。MeshLab是一个强大的3D网格处理工具,对于3D模型的处理和编辑具有非常重要的作用。
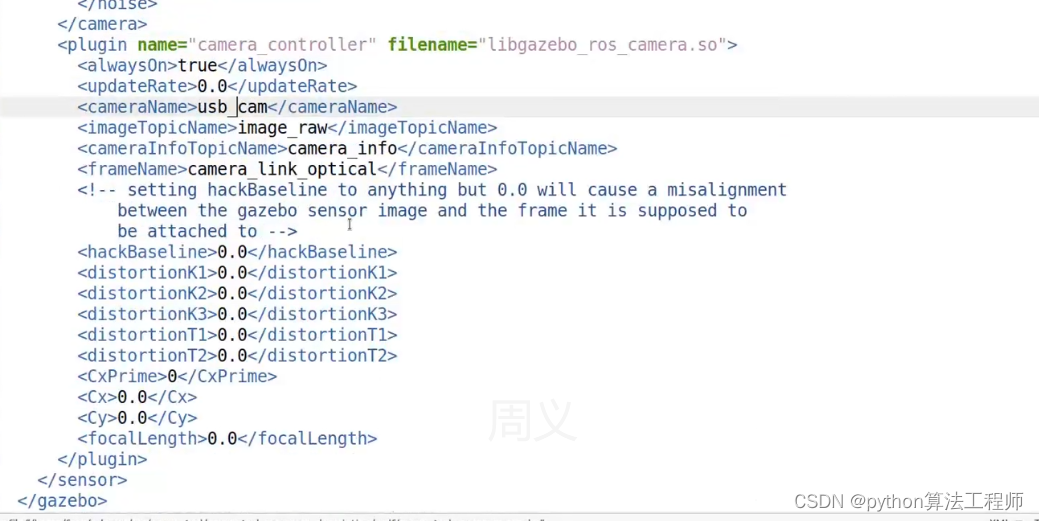
grzebo是ros的一个节点,通过加载插件与ros进行交互
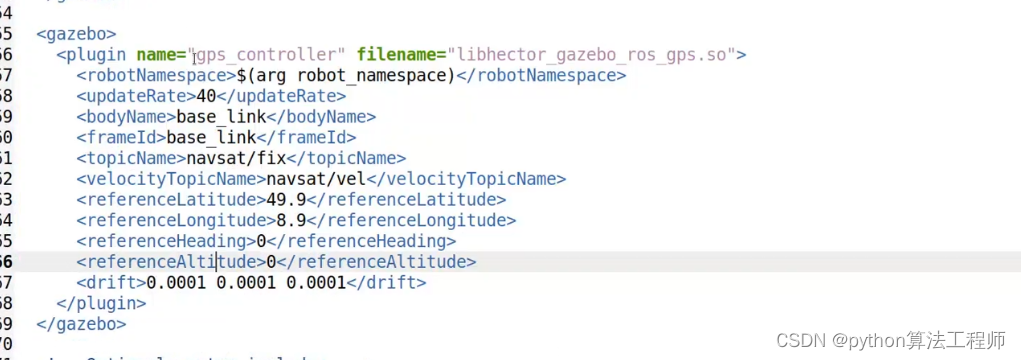

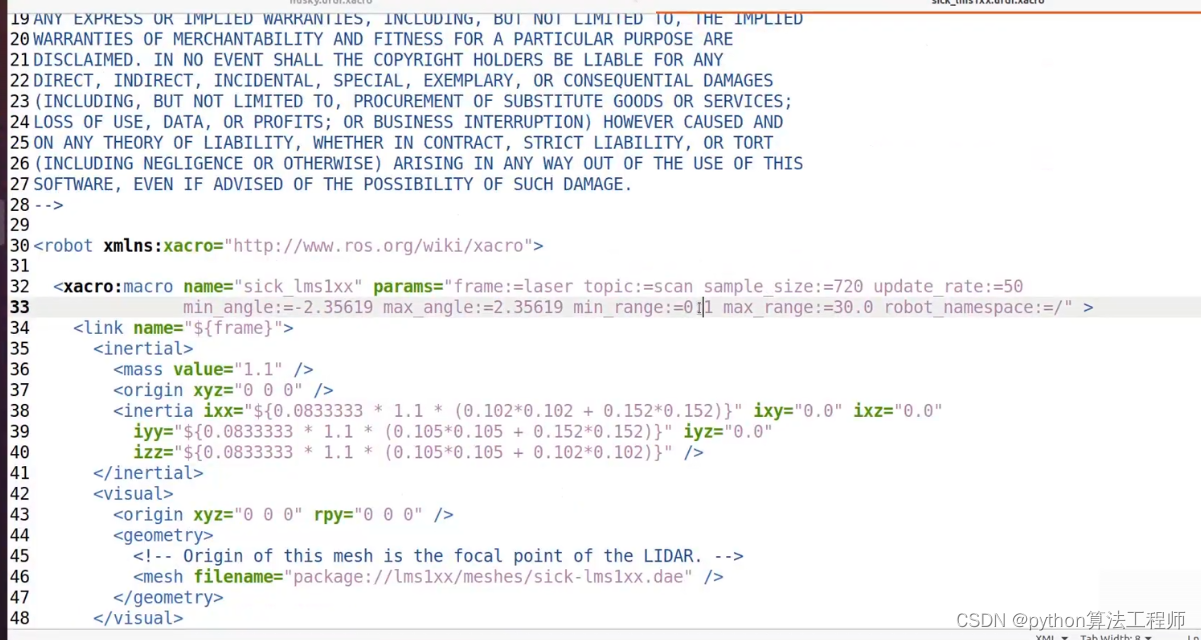
更新频率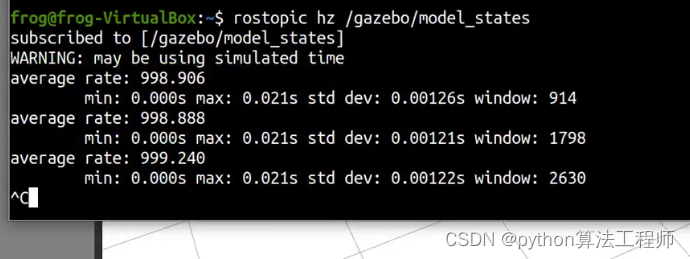
TurtleBot3
https://blog.csdn.net/zbw1185/article/details/121151640
里面的教程文档特别多
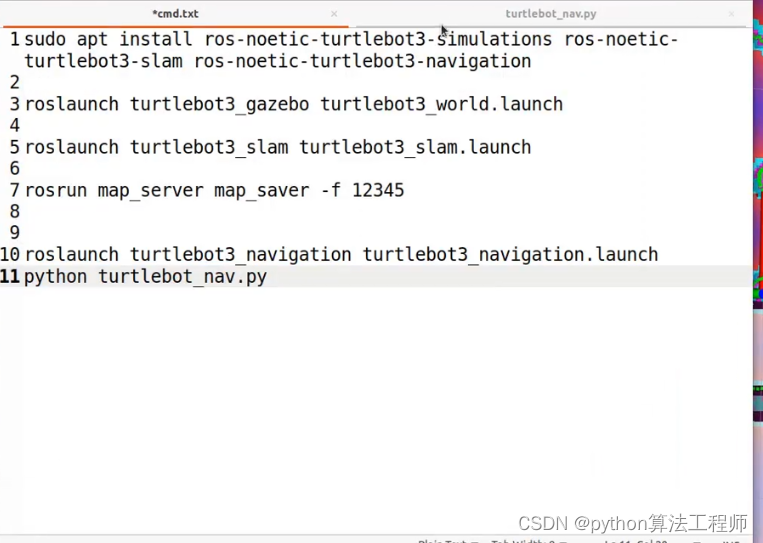
如何安装开发环境

建图 slam 导航
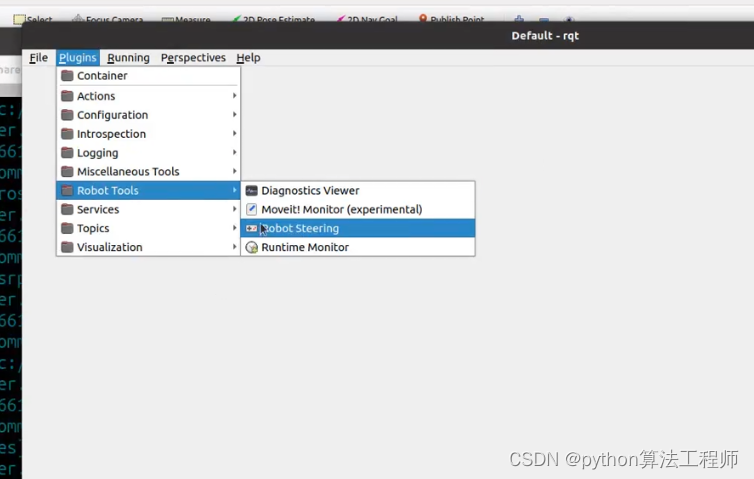
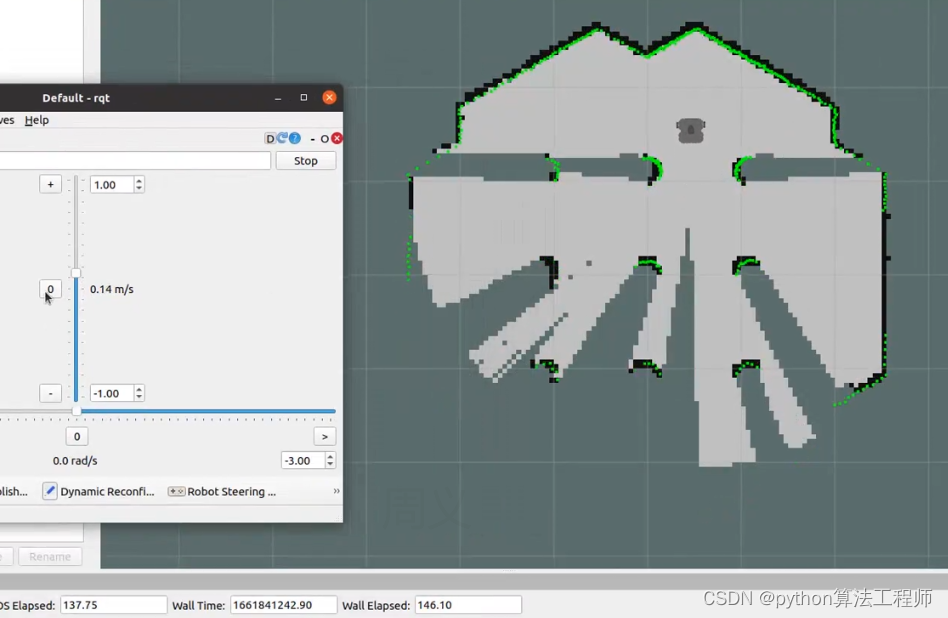
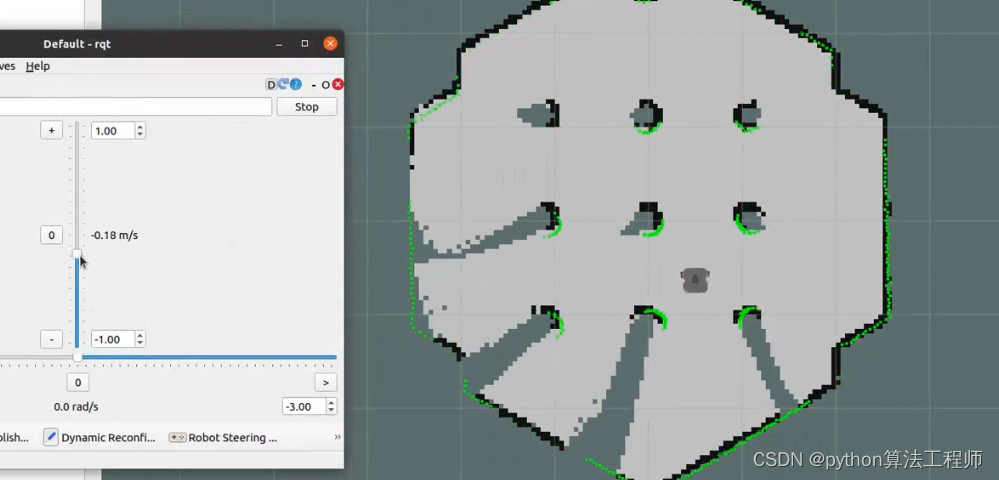
 控制机器人的运动
控制机器人的运动
import rospy
from geometry_msgs.msg import Twist
rospy.init_node("vel_test")
pub = rospy.Publisher("/cmd_vel",Twist,queue_size = 5)
cmd = Twist()
cmd.Linear.x = 0.1
while not rospy.is_shutdown():
pub.publish(cmd)
rospy.sleep(0.1)

 小车慢慢前进
小车慢慢前进
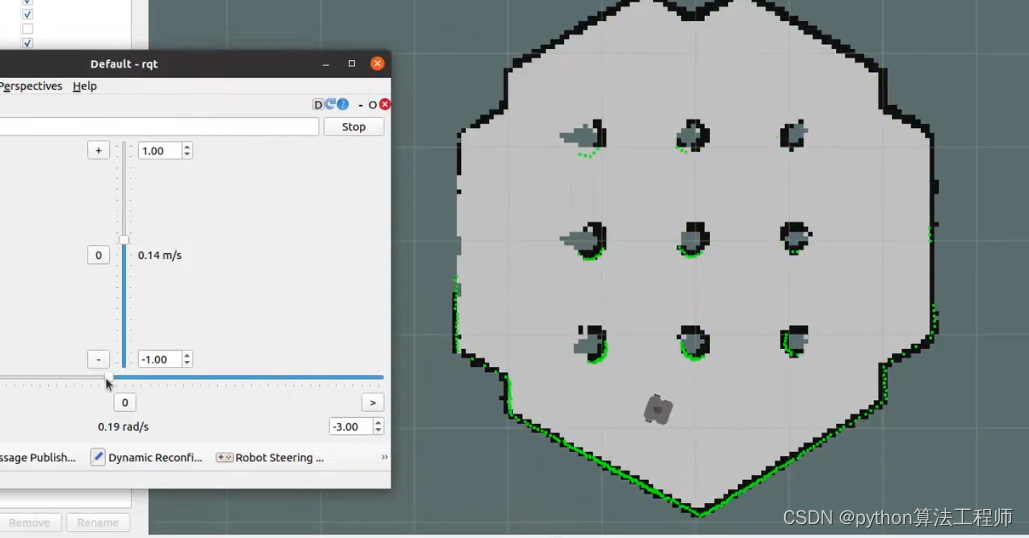
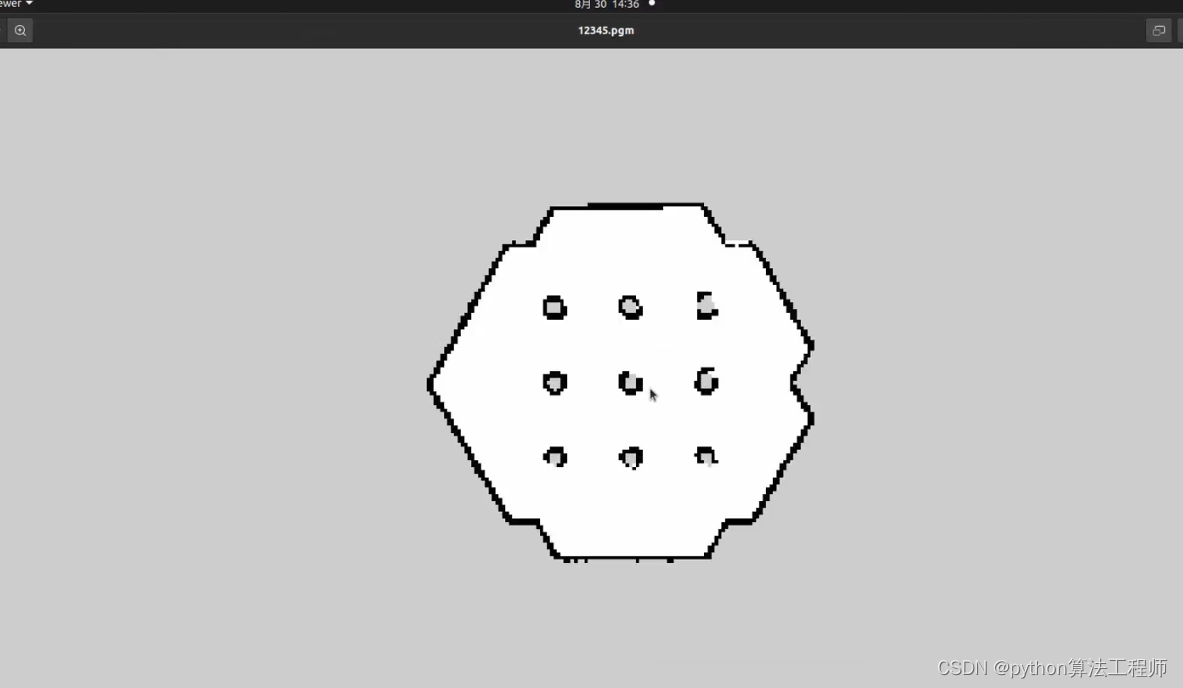
slam建图

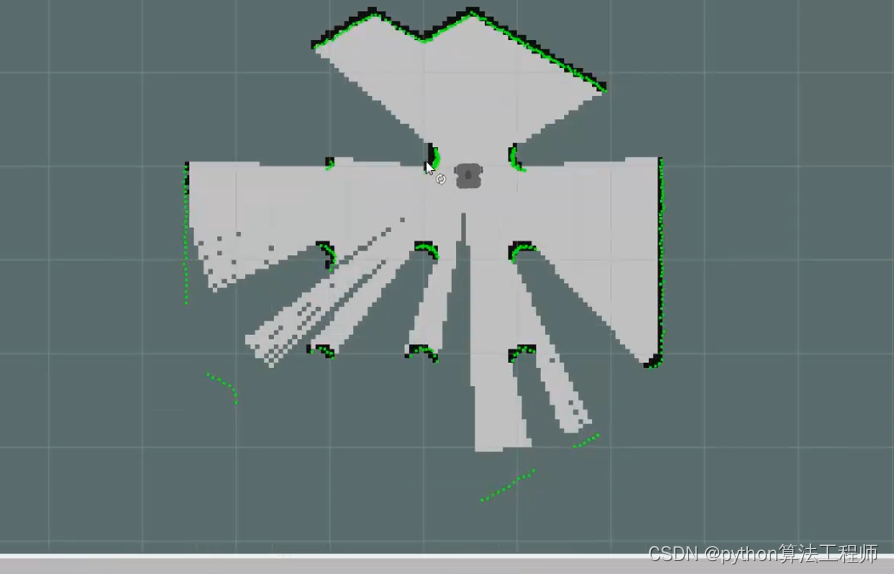
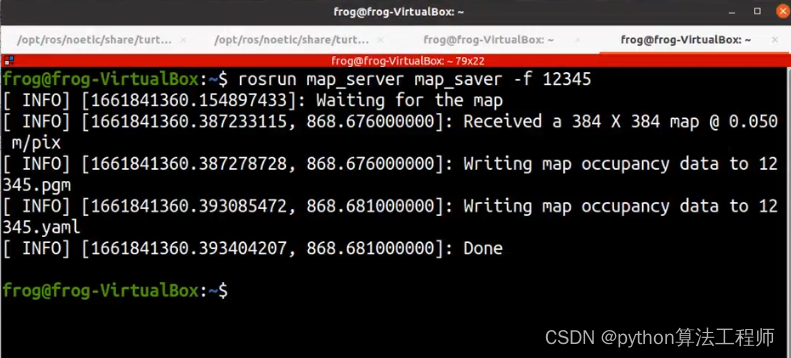
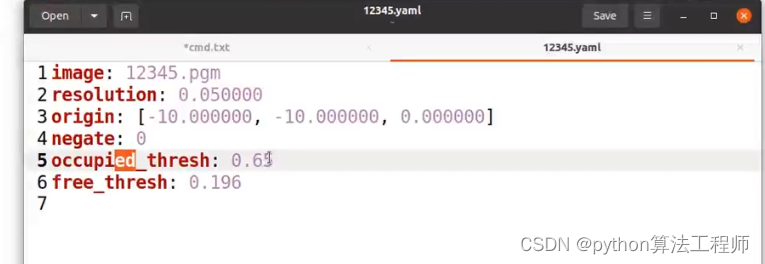
 保存地图
保存地图
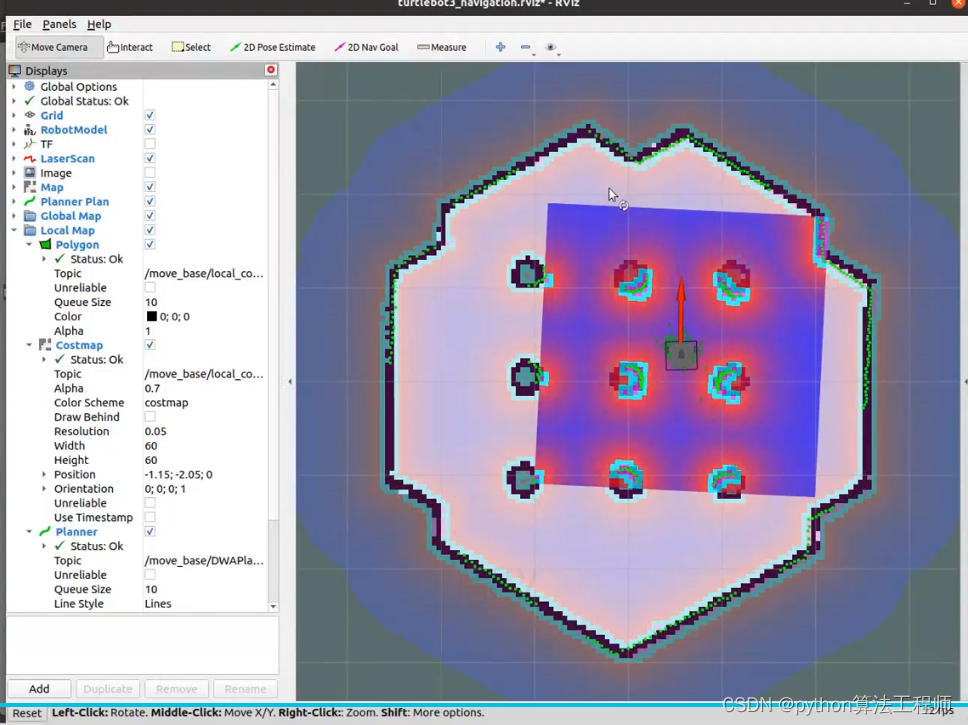
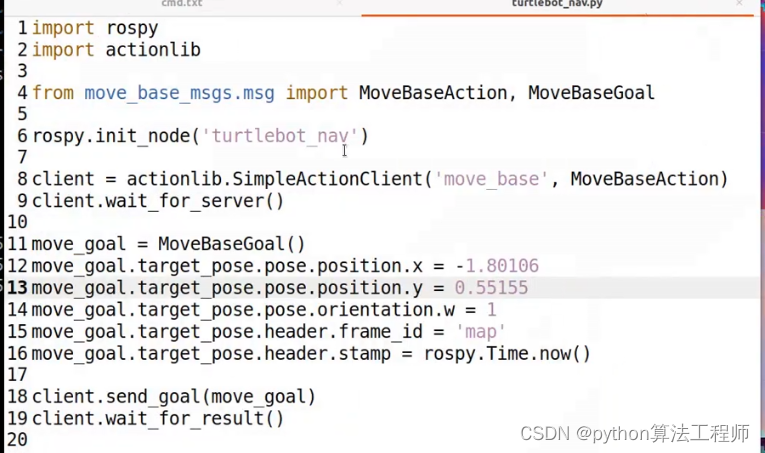
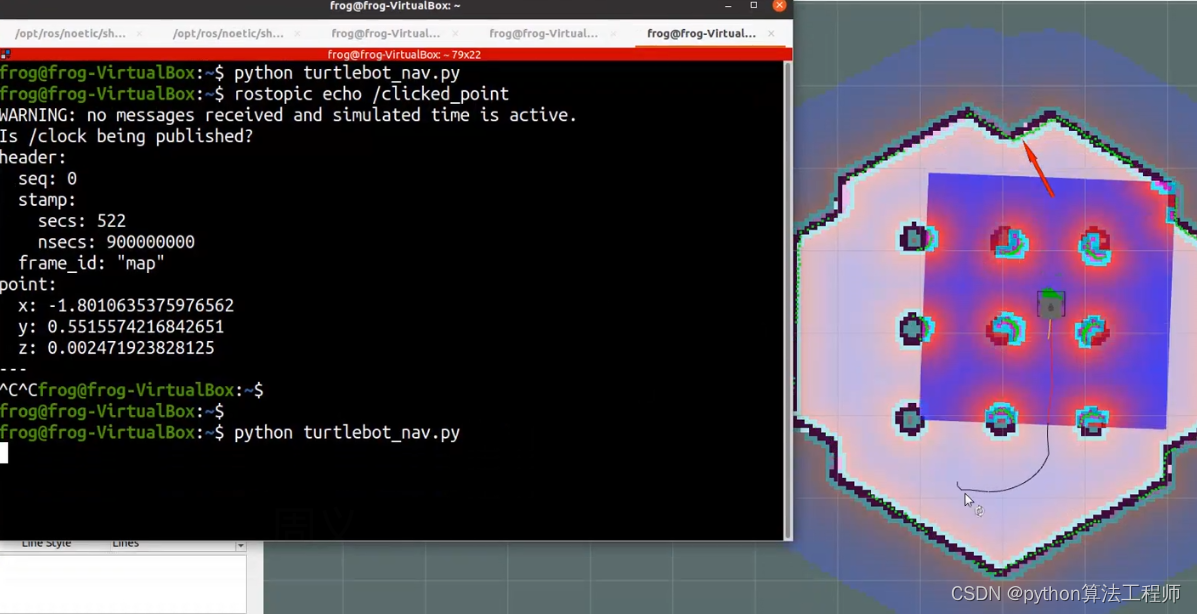
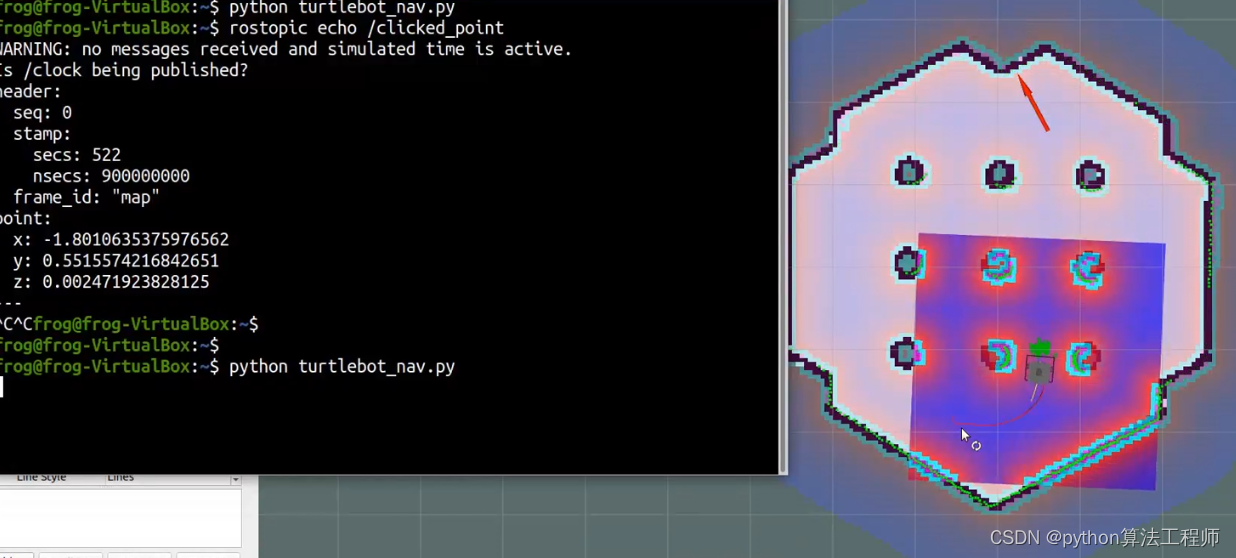
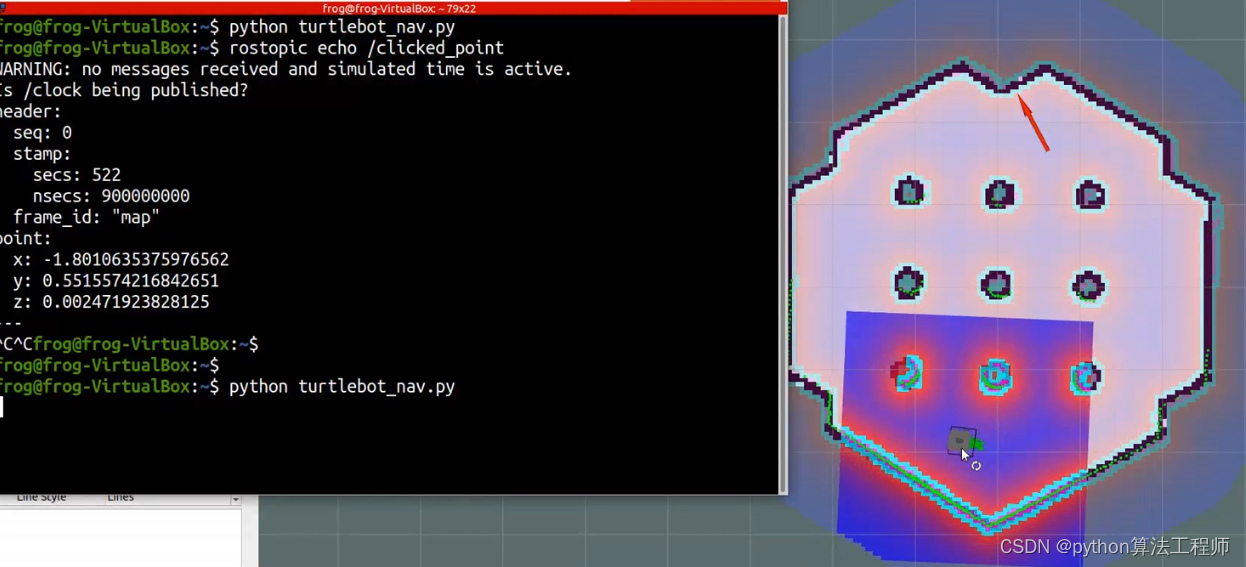
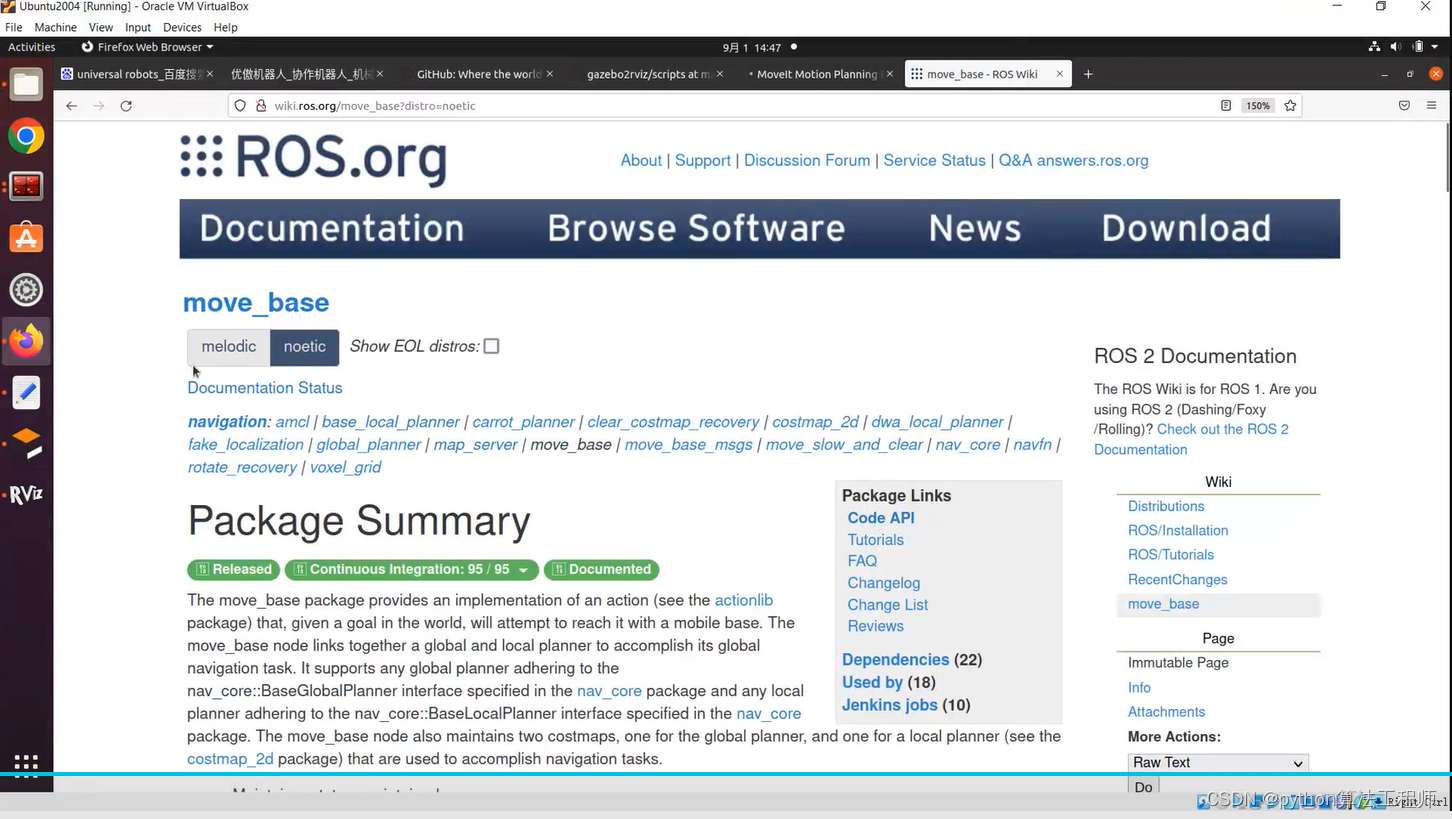
如何通过程序实现自主导航
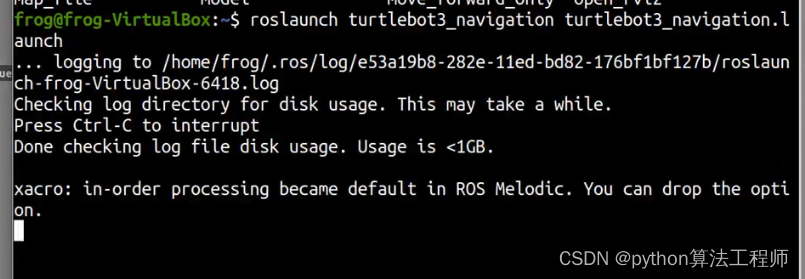
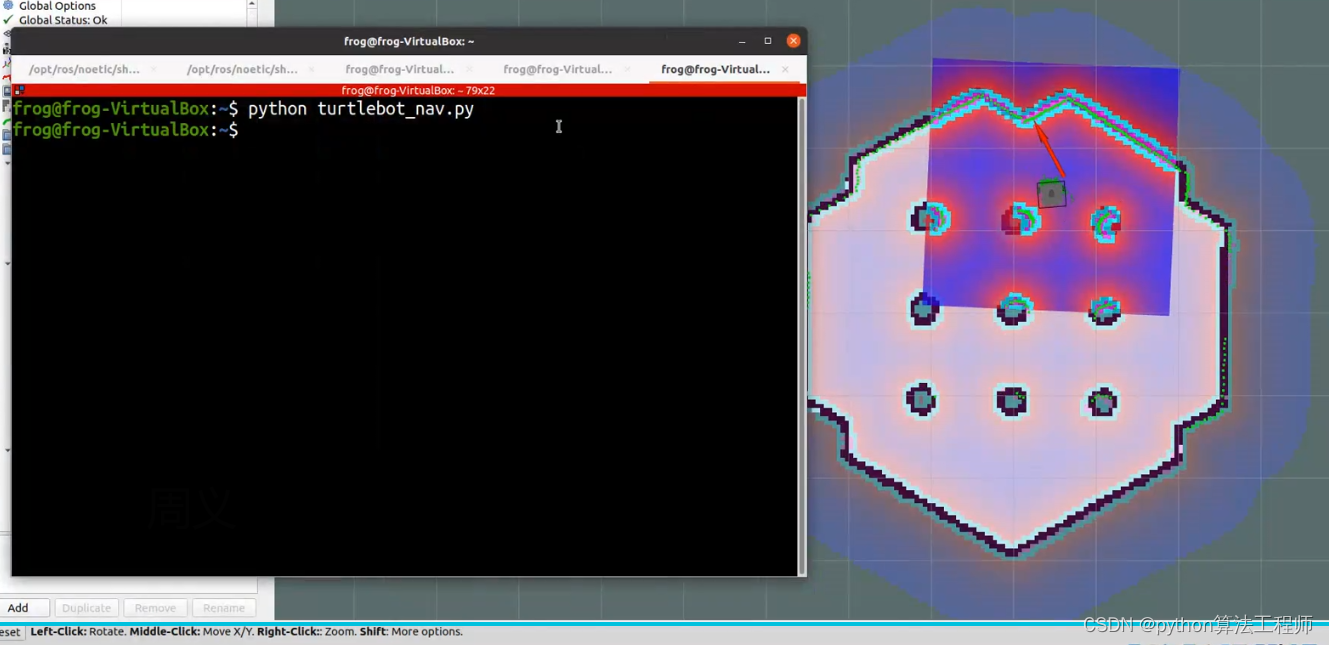
启动导航
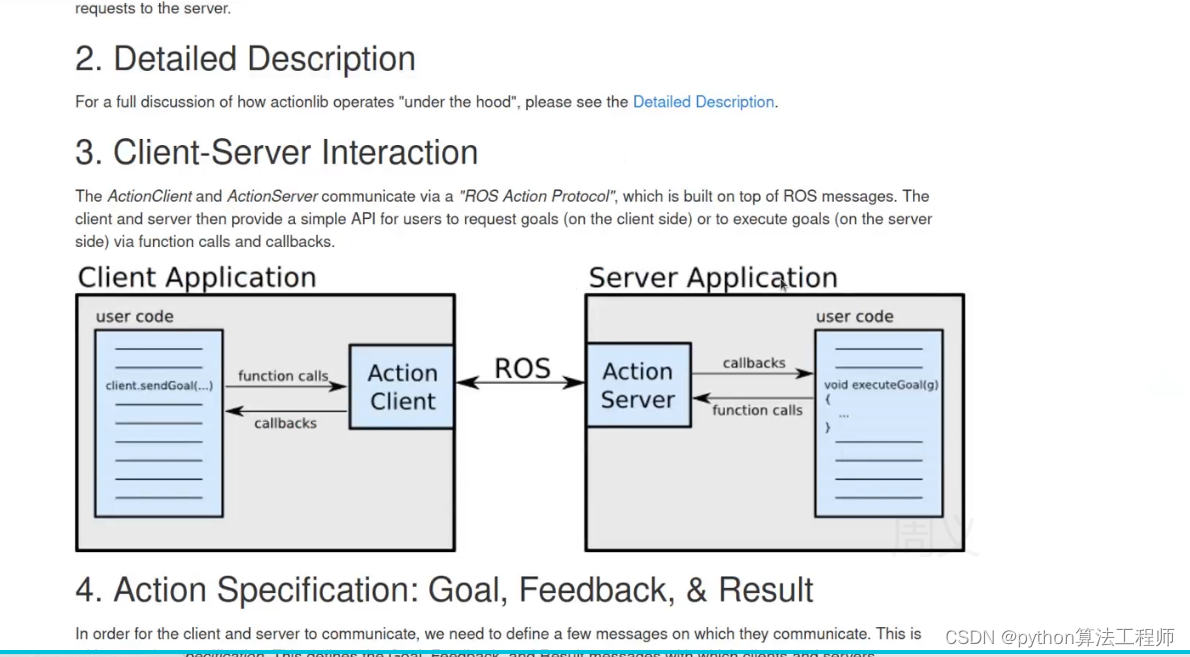
import rospy
import actionlib
from move_base_msgs.msg import MoveBaseAction,MoveBaseGoal
rospy.init_node('turtlebot_nav')
client = actionlib.SimpleActionClient("move_base",MoveBaseAction)
client.wait_for_server()
move_goal = MoveBaseGoal()
move_goal.target_pose.pose.position.x = 1.4781
move_goal.target_pose.pose.position.y= -0,4752
move_goal.target_pose.pose.orientation.w = 1
move_goal.target_pose.header.framp_id = 'map'
client.send_goal(move_goal)
client.wait_for_result()
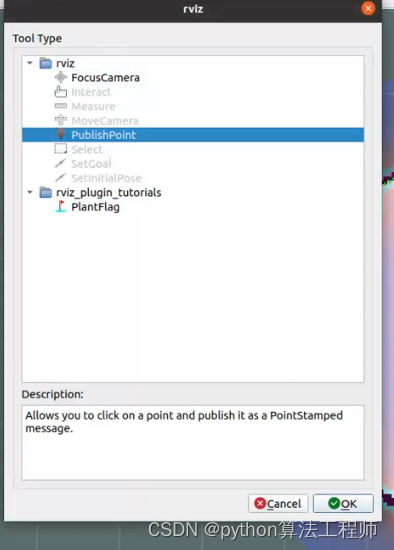
 记录鼠标点的坐标
记录鼠标点的坐标
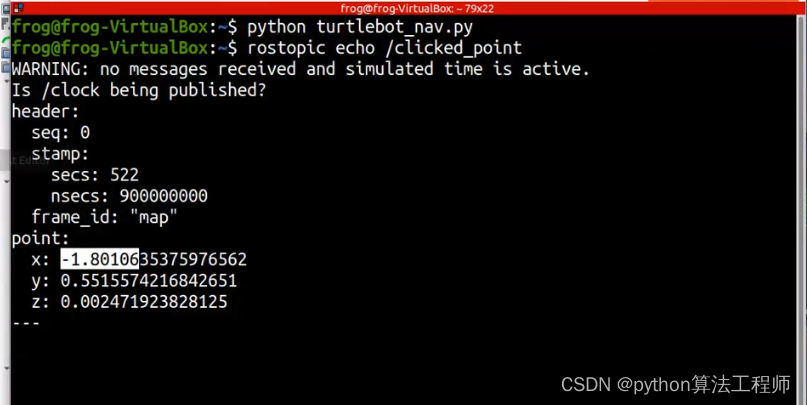 修改x,y
修改x,y
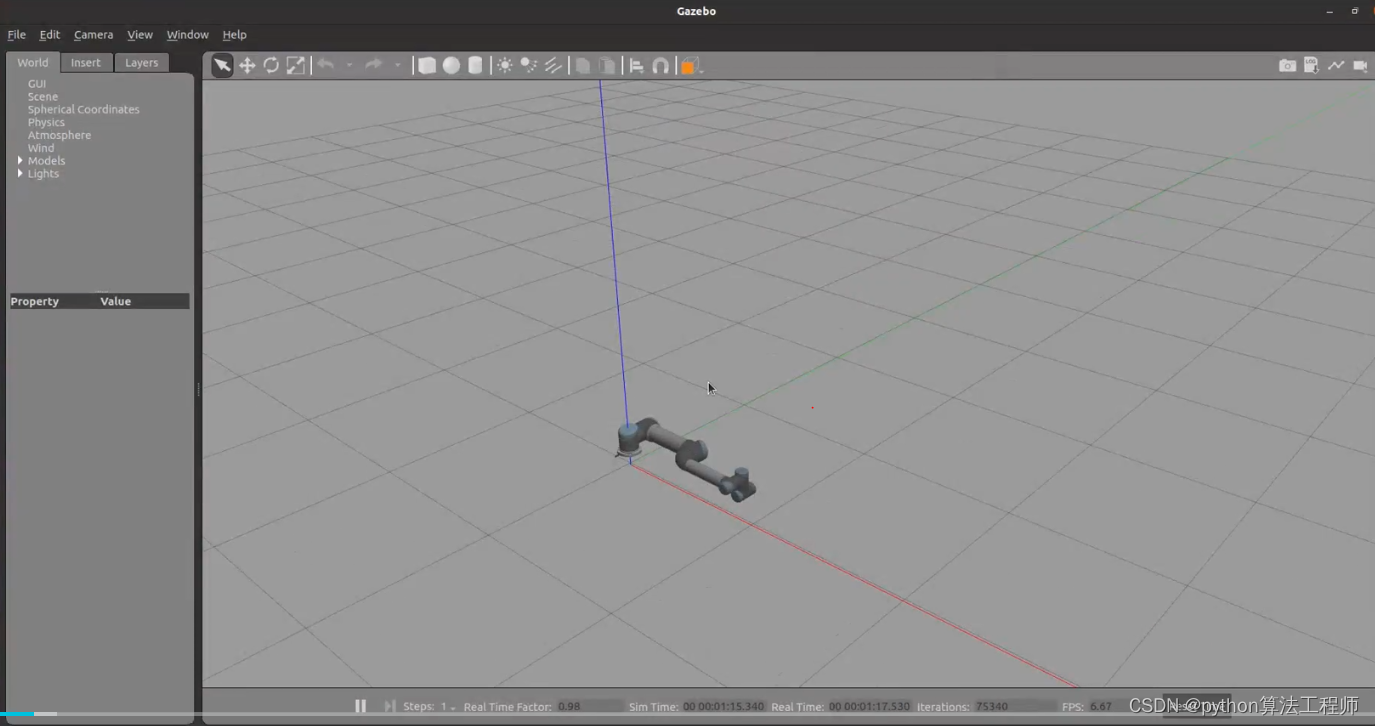
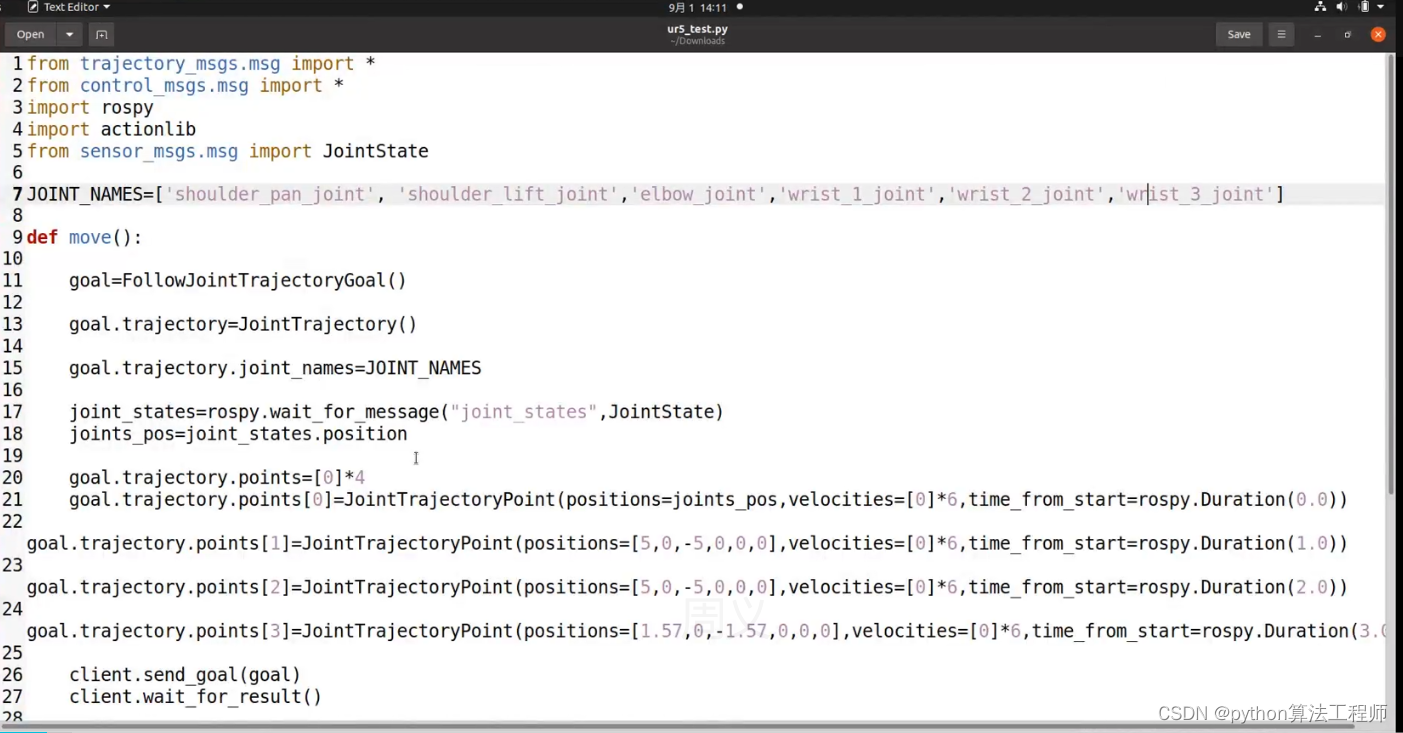
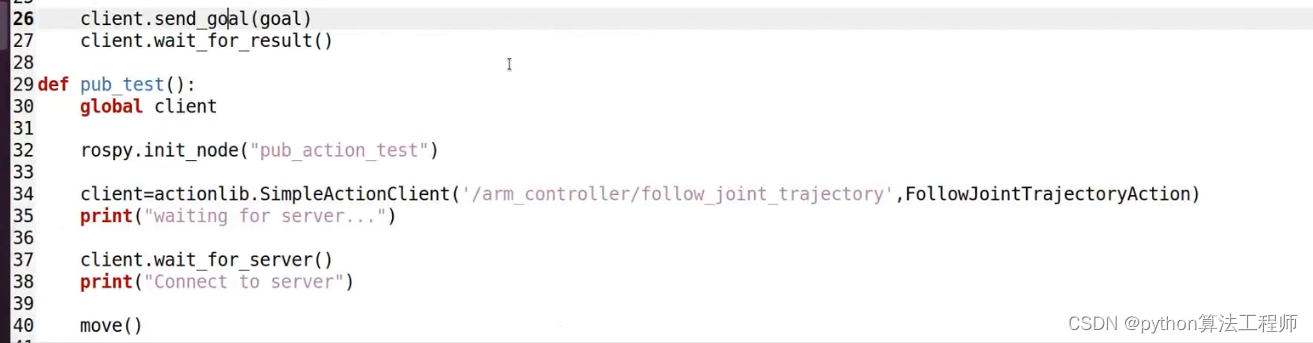
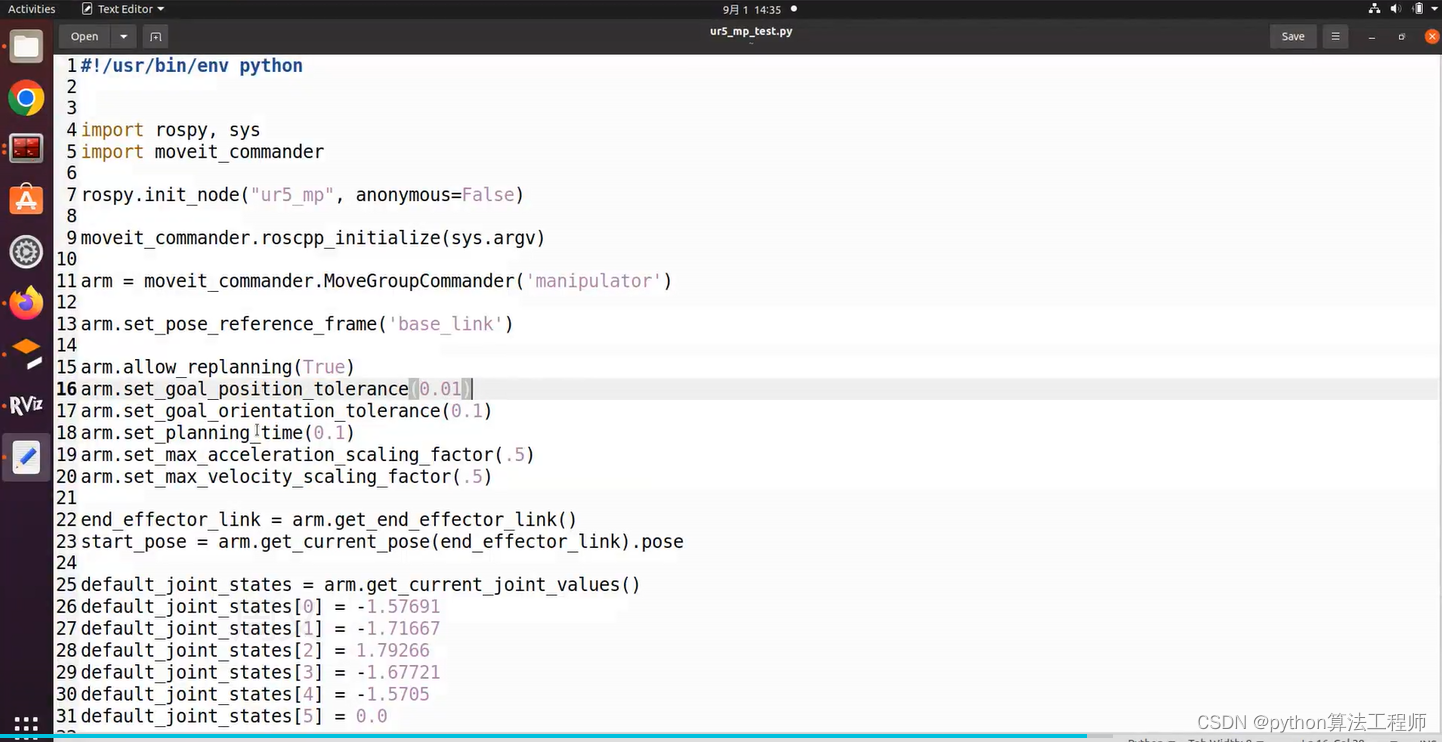
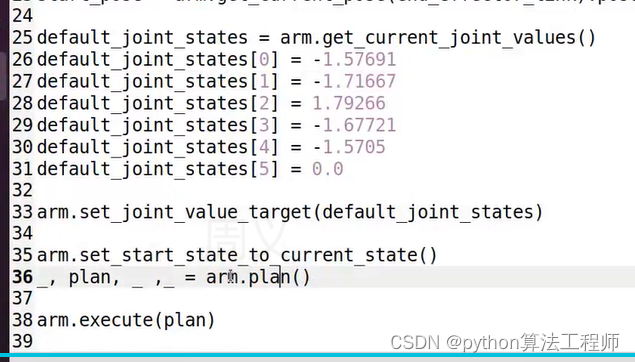
仿真器做机械臂开发
从github上下载软件包
 编译
编译
https://blog.csdn.net/sinat_16643223/article/details/113935412
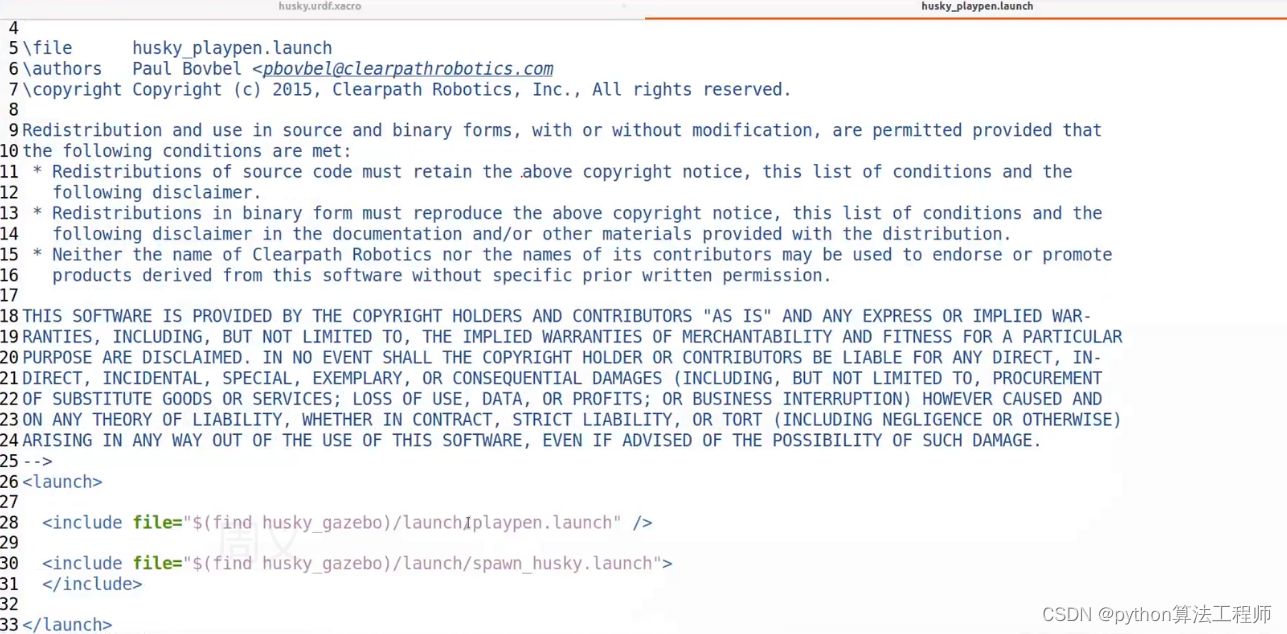
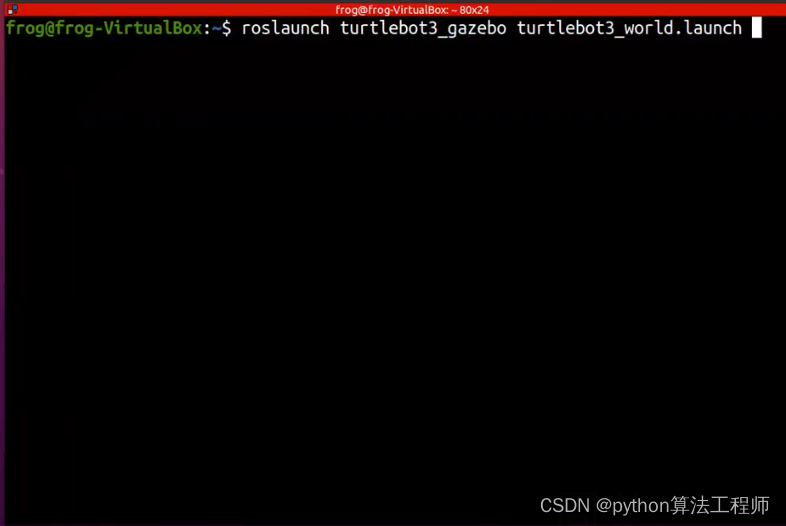
启动仿真器






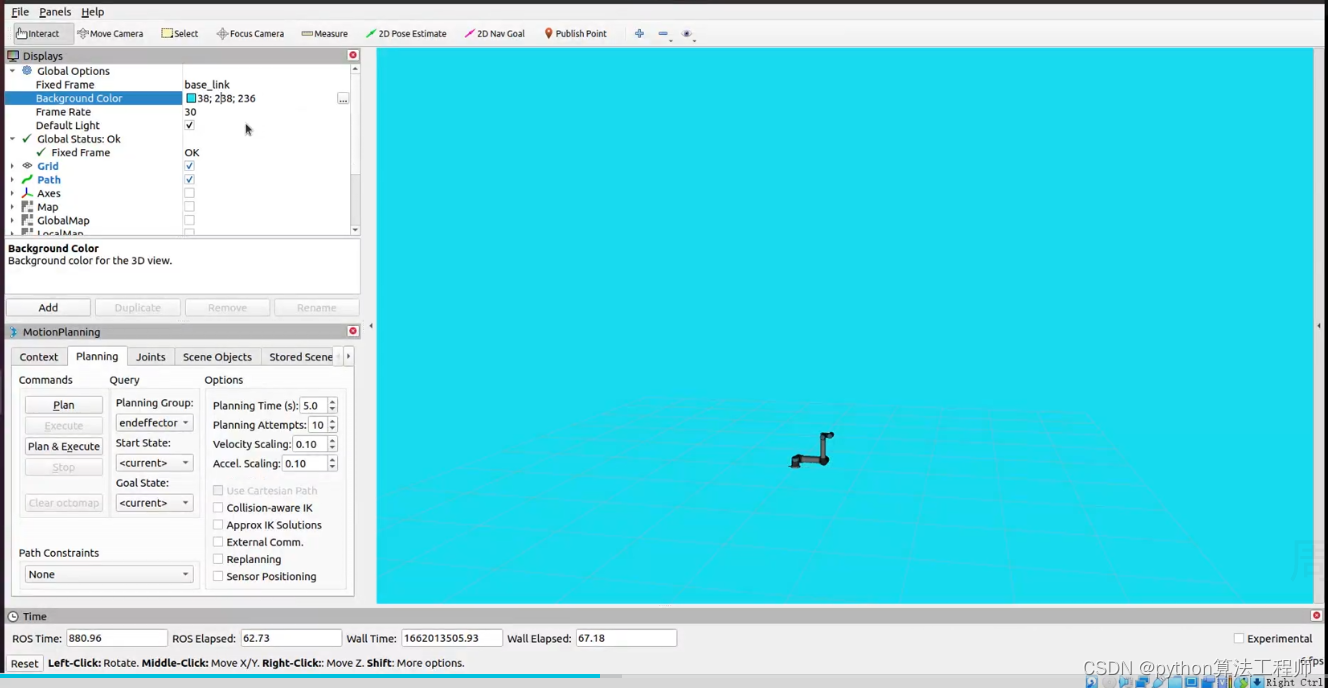
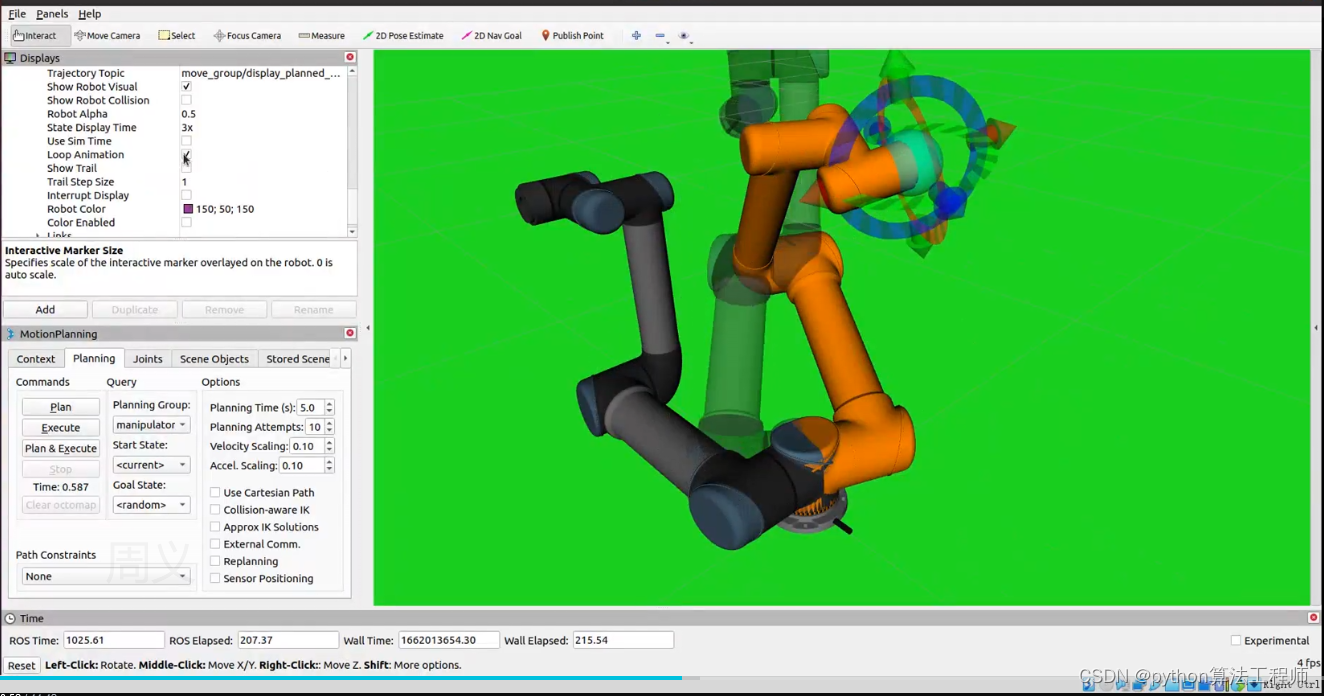
 同步场景
同步场景


![select、poll、epoll之间的区别总结[整理]](https://img-blog.csdnimg.cn/img_convert/21101986ac431f9500e11d7b5ed9a4b8.png)