卡尔曼滤波器-公式推导 | 原理分析 | 将卡尔曼滤波器在MatLab中简单实现
news2026/2/11 7:40:14

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/511345.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

Android 引入hunter-timing监测UI主线程函数运行时耗时,Java(2)
Android 引入hunter-timing监测UI主线程函数运行时耗时,Java(2) (1)在工程的根build.gradle文件配置:
buildscript {repositories {mavenCentral()}dependencies {classpath cn.quinnchen.hunter:hunter-t…
c语言实现三子棋(思路+项目展示+源代码)
📕博主介绍:目前大一正在学习c语言,数据结构,计算机网络。 c语言学习,是为了更好的学习其他的编程语言,C语言是母体语言,是人机交互接近底层的桥梁。 本章来写一个三子棋小游戏吧。 让我们开启c…
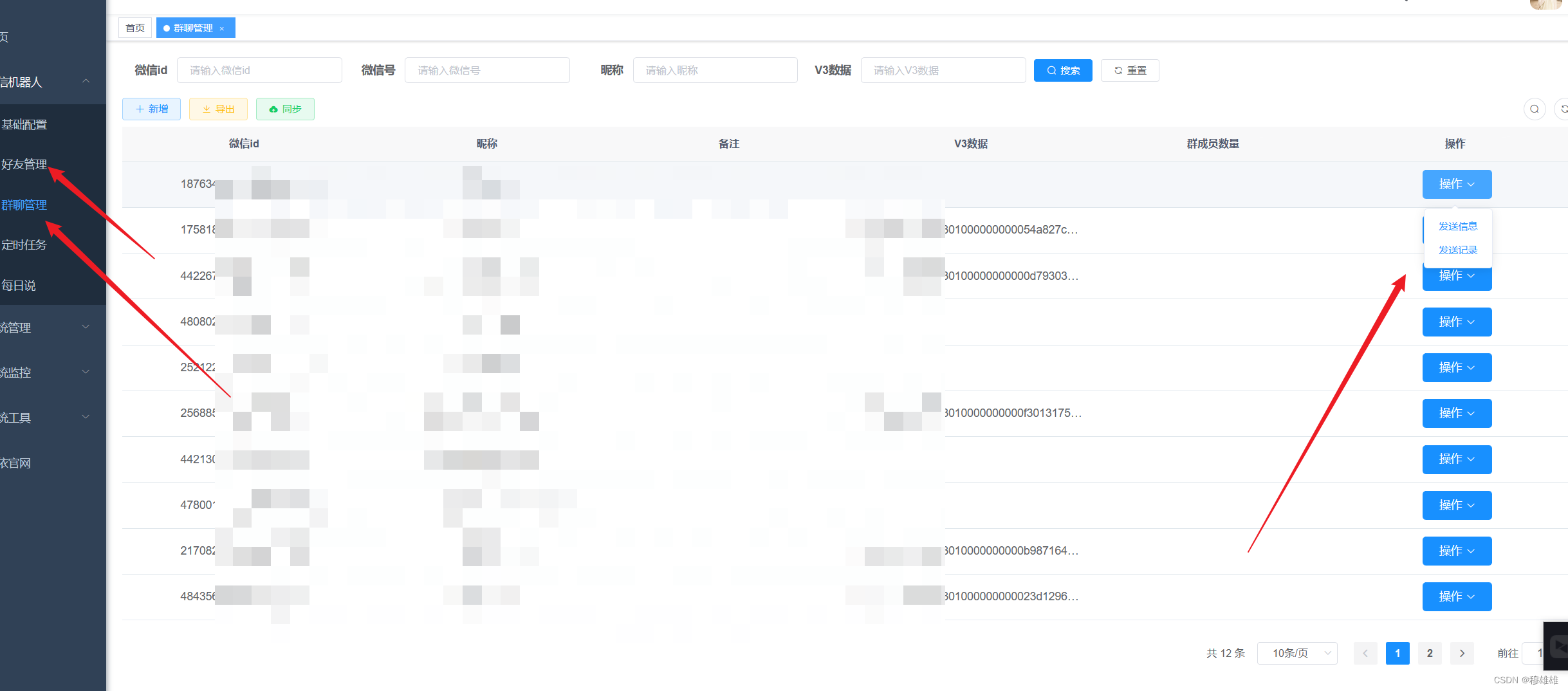
java版本微信机器人使用教程V1.0
大家好,我是雄雄,欢迎关注微信公众号雄雄的小课堂 现在是:2023年5月10日17:57:02
前言
历经好多天,java版本的微信机器人终于写完了初版了,接下来开放注册,大家先试用一下,有问题可以提出来&a…

配置Windows终端直接执行Python脚本,无需输入“python“
配置Windows终端直接执行Python脚本,无需输入"python" 1. 将Python加入环境变量2. 将Python后缀加入环境变量PATHEXT中3. 修改Python脚本的默认打开方式4. *将Python脚本命令加入环境变量*5. 测试 在Linux系统中,在Python脚本的开头指定Python…

Java基础(二十二):File类与IO流
Java基础系列文章
Java基础(一):语言概述
Java基础(二):原码、反码、补码及进制之间的运算
Java基础(三):数据类型与进制
Java基础(四):逻辑运算符和位运算符
Java基础(五):流程控制语句
Java基础(六)࿱…
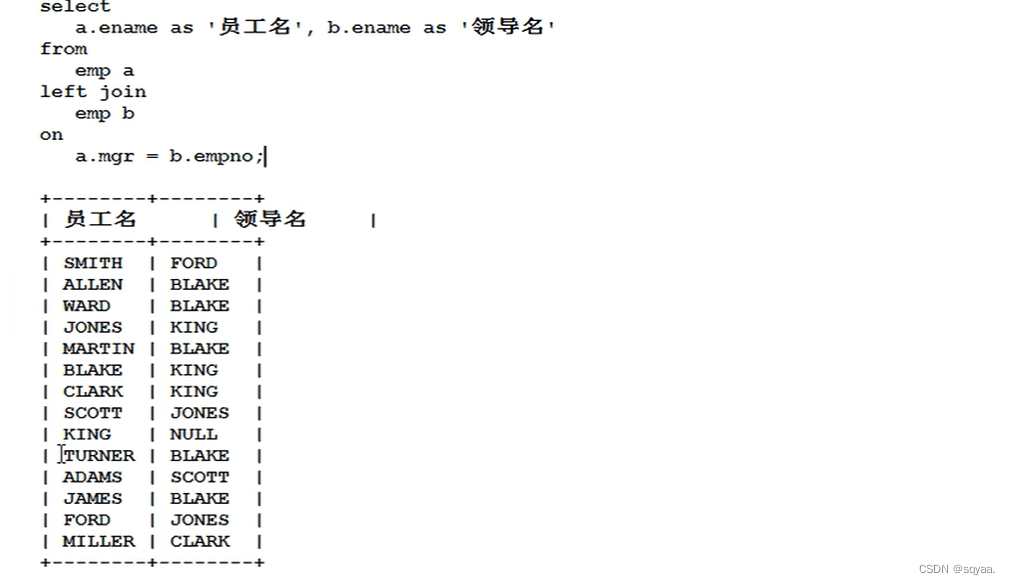
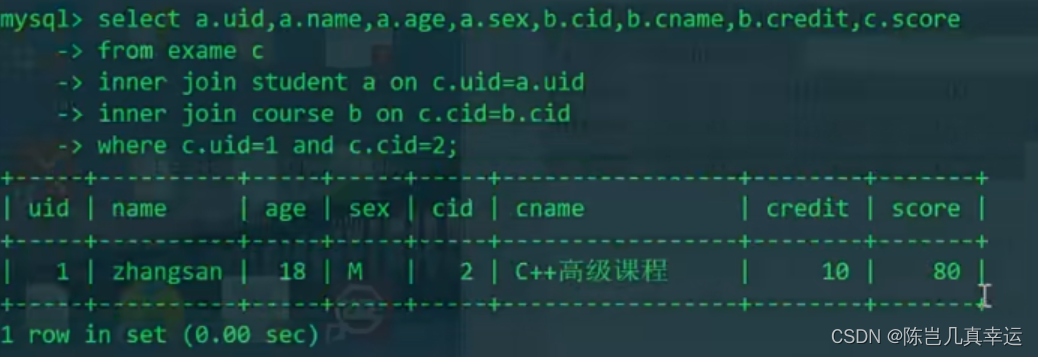
MySQL的内,外,自连接复习
目录 1.找出每个员工的薪资等级,要求显示员工名,薪资,薪资等级 2.查询员工的上级领导,要求显示员工名和对应的领导名 外连接的引入 五月 1.找出每个员工的薪资等级,要求显示员工名,薪资,薪资等…

【笔试强训选择题】Day10.习题(错题)解析
作者简介:大家好,我是未央; 博客首页:未央.303 系列专栏:笔试强训选择题 每日一句:人的一生,可以有所作为的时机只有一次,那就是现在!!! 文章目录…

Vue电商项目--开发ListContainer模块
swiper基本使用
上节,我们使用了mock把数据成功的存储到了banner组件当中。现在先复习一下swiper这个轮播图插件的使用
Swiper中文网-轮播图幻灯片js插件,H5页面前端开发
下载swiper 首先我们需要css和js。然后把这俩个捞走 看说明书,引入js和css 这里…

深度学习笔记之卷积神经网络(三)卷积示例与池化操作
深度学习笔记之卷积神经网络——卷积示例与池化操作 引言卷积神经网络:卷积层卷积层的计算过程 池化层描述池化层的作用——降低模型复杂度,防止过拟合池化层执行过程池化层代码示例 池化层的作用——平移不变性卷积加池化作为一种无限强的先验池化层的反…
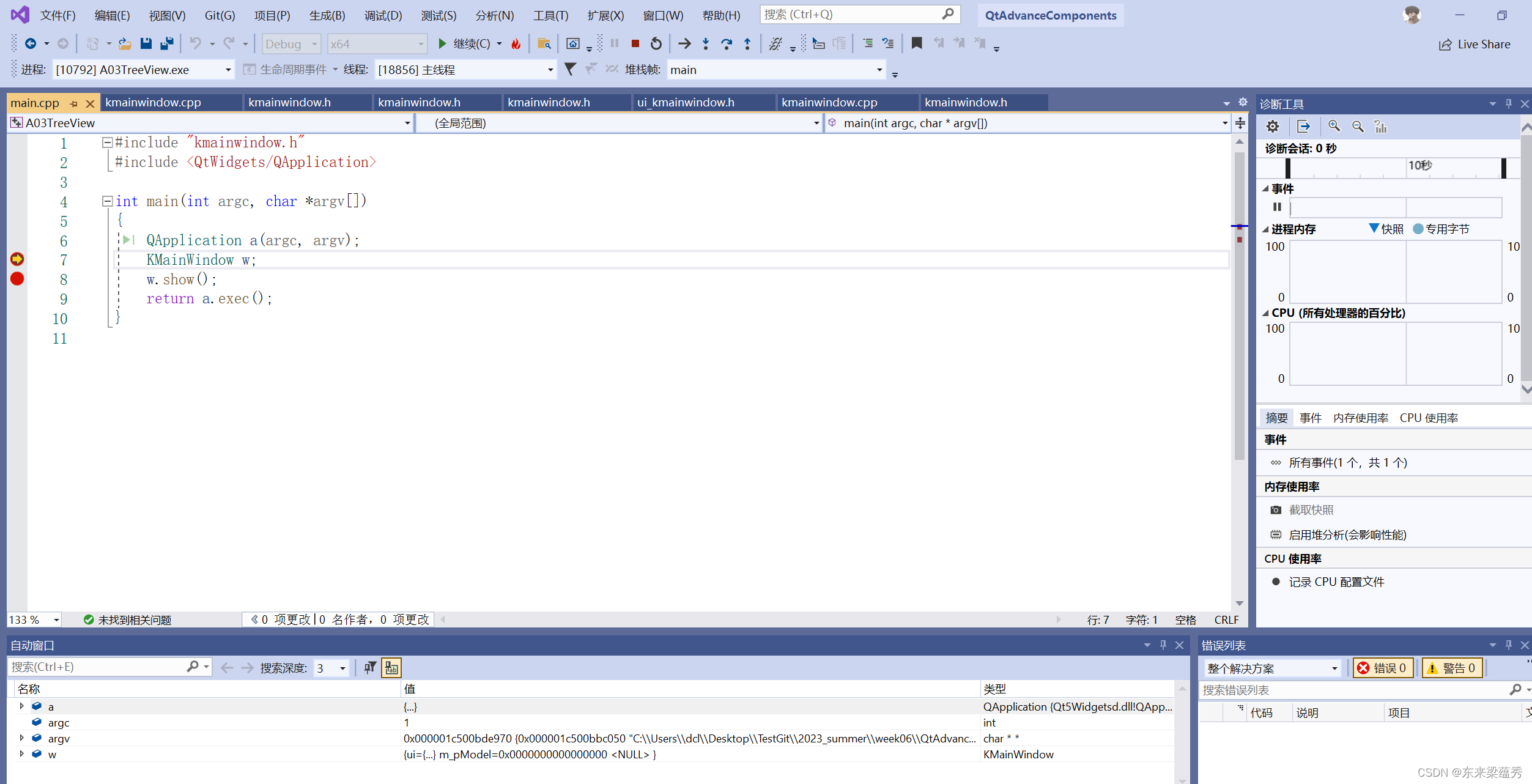
在vs2019中调试qt5.9.3为例
vs2019中其实可以调试qt,此环境配置qt5.9.3和vs2019,当前配置,作为一个记录,也方便大家查看。 vs配置qt环境
首先需要配置好qt在vs2019,可以打开网址https://download.qt.io/archive/vsaddin/2.8.1/, 我准…

【C++】继承和多态、public、private、protected、重写
区分继承与多态、辨别public、protected、private 继承与多态的概念继承与多态的区别与联系区别:联系:示例结果: 继承和访问的权限说明示例:结果 结论 继承与多态的概念 面向对象三大原则:封装、继承、多态。继承是一种…

探索Vue的组件世界-自定义指令
目录
自定义指令
钩子函数参数
使用
什么时候用
在Vue体系下创建一个自定义指令
使用自定义指令及示例要求
全局注册一个自定义指令 自定义指令
全局创建vue自定义指令
Vue.directive("demo", {// 只调用一次,指令第一次绑定到元素时调用。// 在…
MySQL常用SQL
目录
库操作
查询数据库
创建数据库 删除数据库 选择数据库
表操作
查看表
创建表 查看表结构 查看建表sql
删除表 (整表删除) CRUD操作
insert增加 update修改
delete删除
select查询
去重distinct
空值查询
union合并查询
带in子查询 …
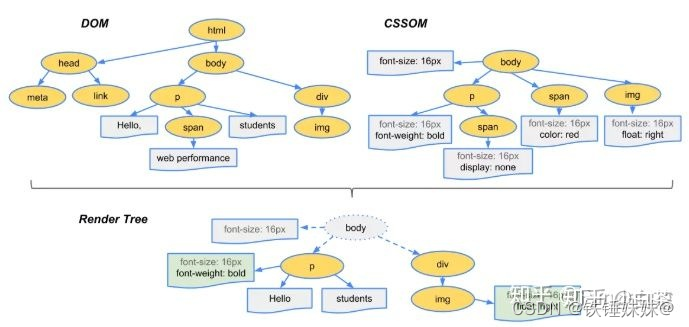
浏览器从输入URL到页面渲染加载的过程(浏览器知识体系整理)
文章目录 前言一、梳理主干流程二、浏览器接收url并开启一个新进程1. 浏览器是多进程的2. 浏览器内核是多线程的3. JS引擎单线程的原因4. GUI渲染线程与JS引擎线程互斥 二、解析URL三、DNS域名解析1. DNS是什么?2. IP和域名的关系3. 域名服务器概念图4. DNS域名解析…

使用 OpenCV 进行基于 ESP32 CAM 的目标检测和识别
概述:基于 ESP32 CAM 的目标检测和识别
本教程介绍了使用OpenCV基于 ESP32 CAM的目标检测和识别主题。OpenCV 是一个开源的图像处理库,不仅在工业界而且在研发领域都得到了非常广泛的应用。
这里对于对象检测,我们使用了cvlib 库。该库使用 COCO 数据集上的预训练 AI 模型…
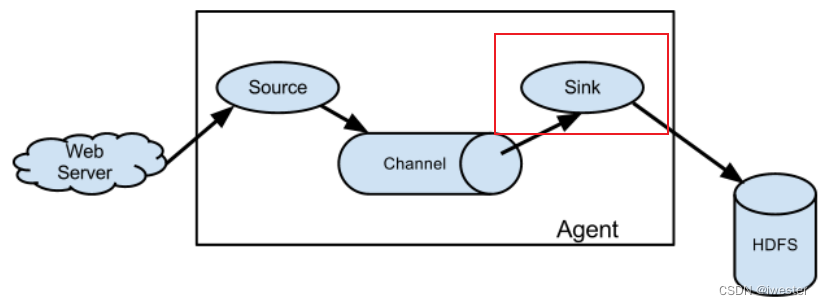
Flume系列:Flume Sink使用
目录
Apache Hadoop生态-目录汇总-持续更新
1:HDFS Sink
HDFS小文件的处理
HDFS存入大量小文件的影响:
HDFS小文件处理:
2:logger Sink
3:写入Kafka - 可以使用kafka channel代替 Apache Hadoop生态-目录汇总-持…

力扣sql中等篇练习(十八)
力扣sql中等篇练习(十八)
1 银行账户概要
1.1 题目内容
1.1.1 基本题目信息1 1.1.2 基本题目信息2 1.1.3 示例输入输出 1.2 示例sql语句
# Write your MySQL query statement below
SELECT u.user_id,u.user_name,u.creditIFNULL(t1.c1,0) credit,case when u.creditIFNULL…

分享一个无需账号完全免费的 ChatGPT-4 的平台
AIGC从入门到精通教程 1. 访问 SteamShip2. 进入创建页面,选择新建一个 GPT-4 实例。3. 完成创建后,您便可以尽情体验 GPT-4本教程收集于:
AIGC从入门到精通教程 大家都知道,ChatGPT4.0是要订阅Plus(一个月20美元)后才能体验的。 今天就给大家弄一个白嫖ChatGPT4.0的教程…
DEJA_VU3D - Cesium功能集 之 107-卫星探测效果
前言 编写这个专栏主要目的是对工作之中基于Cesium实现过的功能进行整合,有自己琢磨实现的,也有参考其他大神后整理实现的,初步算了算现在有差不多实现小140个左右的功能,后续也会不断的追加,所以暂时打算一周2-3更的样子来更新本专栏(每篇博文都会奉上完整demo的源代码,…