1.对于卷积层来说,卷积对位置比降敏感
①检测垂直边缘
使用K=[-1,1] 的卷积核进行卷积操作,实现垂直边缘信息的检测
如果因为抖动曝光啥的同一个物体,1像素可能往右移位了。K的卷积核就得不到相应位置的边缘信息。
②需要一定程度的平移不变性,即使1像素边缘位置移动了,卷积后池化就可以检测到未移动的边缘。池化层就可以
2.二维最大池化
①返回滑动窗口的最大值

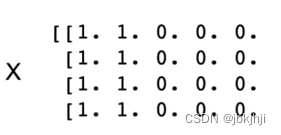
②垂直边缘检测
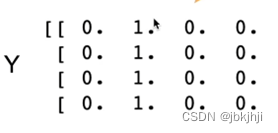
 经过卷积层k=[1,-1]
经过卷积层k=[1,-1]
 说明第二列是从黑到白的边缘。
说明第二列是从黑到白的边缘。
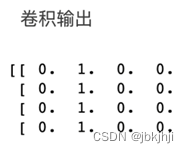
【个人猜】如果输入图像的时候不小心抖动。1像素偏移
 经过卷积层k=[1,-1]
经过卷积层k=[1,-1]
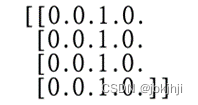 输出边缘信息变了。
输出边缘信息变了。
但经过2*2最大池化层:
 能检测到边缘信息
能检测到边缘信息
3.填充,步幅,多个通道
①池化层和卷积层类似都有填充和步幅
②没有可学习的参数
③输出通道数=输入通道数(卷积层的输出通道数是1)
4.池化层有哪些?
①最大池化层:每个窗口中最强的模式信号
②平均池化层:每个窗口中的平均值
【总结】
①池化层返回窗口最大或平均
②缓解卷积层对位置的敏感性
③有窗口大小,填充,步幅超参数。
④输出通道=输入通道。输入通道有几层,输出几层。
⑤默认值步幅跟池化窗口的大小相同
对应的代码:
1.池化层 窗口最大 或 平均
import torch
from torch import nn
from d2l import torch as d2l
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i:i + p_h, j:j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i:i + p_h, j:j + p_w].mean()
return Y2.验证 平均
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]], dtype=torch.float32)
print(pool2d(X, (2, 2), 'avg'))输出:
tensor([[2., 3.],
[5., 6.]])
3.填充和步幅
X = torch.arange(16, dtype=torch.float32).reshape((1, 1, 4, 4))
print(X)
'''
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]]]])
'''4.步幅跟池化窗口相同
pool2d = nn.MaxPool2d(3)
print(pool2d(X))
'''
tensor([[[[10.]]]])
'''5. 填充和步幅手动设定
pool2d = nn.MaxPool2d((2, 3), padding=(1, 1), stride=(2, 3))
print(pool2d(X))
'''
tensor([[[[ 1., 3.],
[ 9., 11.],
[13., 15.]]]])
'''6.池化层在每个通道上单独运算
X = torch.cat((X, X + 1), 1)
print(X)
'''
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[ 1., 2., 3., 4.],
[ 5., 6., 7., 8.],
[ 9., 10., 11., 12.],
[13., 14., 15., 16.]]]])
'''
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
print(pool2d(X))
'''
tensor([[[[ 5., 7.],
[13., 15.]],
[[ 6., 8.],
[14., 16.]]]])
'''
![[附源码]Python计算机毕业设计Django二手书店设计论文](https://img-blog.csdnimg.cn/39c2e3a490b14be0b82e16b6e788c56c.png)




![[附源码]SSM计算机毕业设计学院竞赛管理信息系统JAVA](https://img-blog.csdnimg.cn/f2adf0aab3214982852882ef33e1eb2a.png)