目标检测 pytorch复现CenterNet目标检测项目
- 1、项目创新点
- 2、CenterNet网络结构
- 3、CenterNet的模型计算流程如下:
- 4、详细实现原理
- 4.1、heatmap(热力图)理解和生成
- 4.1.1 heatmap生成
- 4.1.2 heatmap高斯函数半径的确定
- 4.1.3 CenterNet中生成高斯核的部分代码进行解析:
- 5、预处理数据增强
- 6、损失函数
- 7、pytorch复现CenterNet目标检测项目
- 7.1 环境搭建
- 7.2 数据集准备
- 7.3 修改配置信息
- 7.4 训练数据
- 7.5 验证模型
- 7.6 测试数据
- 7.7 批量保存每张图片的预测结果(bbox,id,score)
1、项目创新点
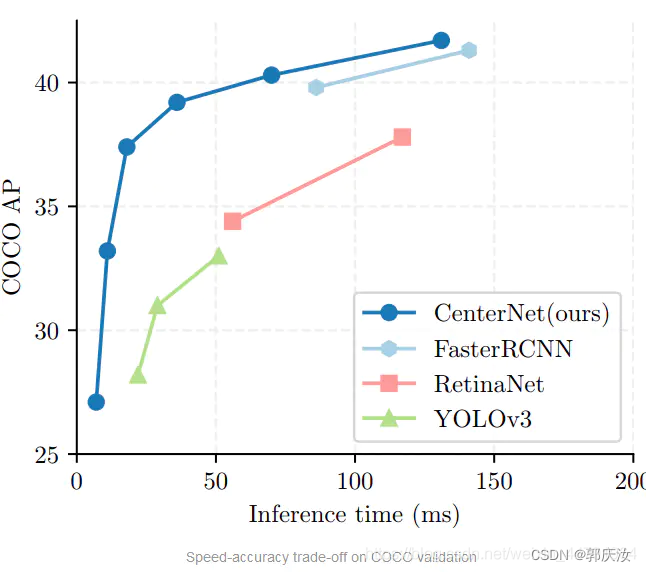
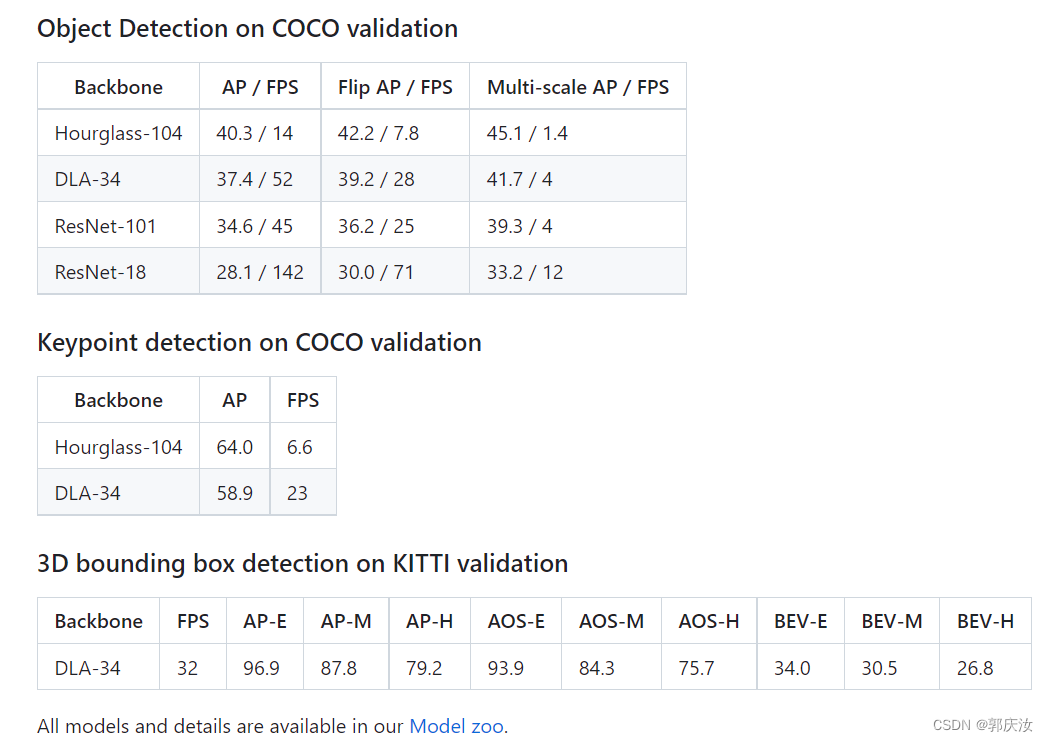
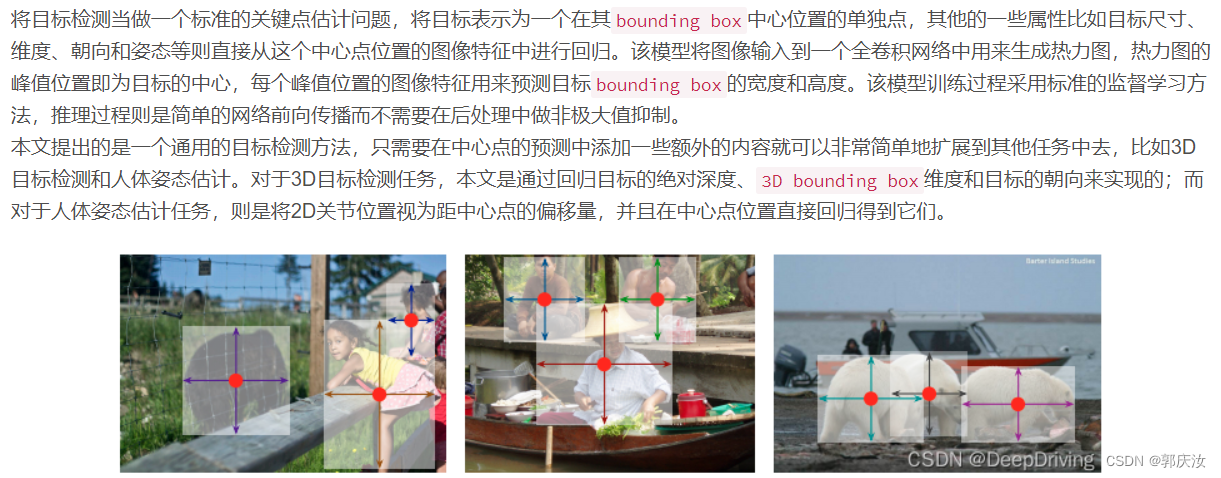
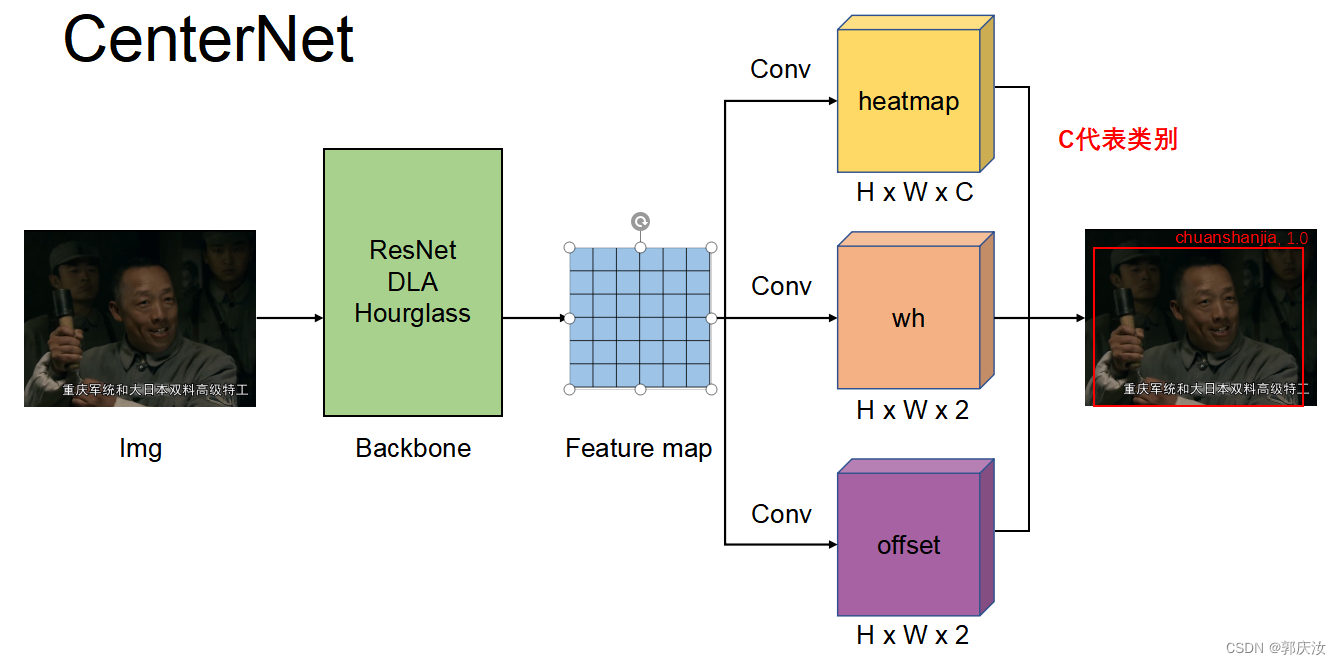
CenterNet是在2019年论文Objects as points中提出,相比yolo,ssd,faster_rcnn依靠大量anchor的检测网络,CenterNet是一种anchor-free的目标检测网络,在速度和精度上都比较有优势
2、CenterNet网络结构

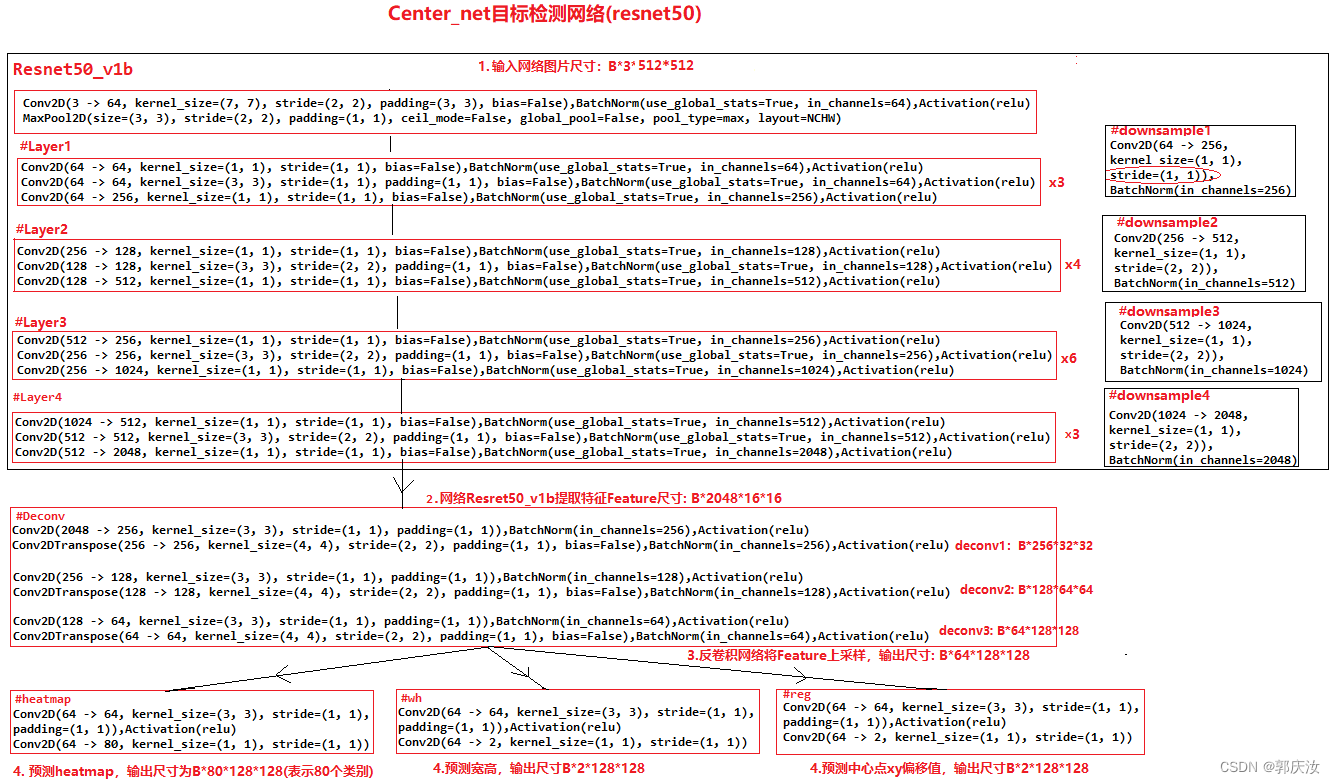
实际工作中我主要用CenterNet进行目标检测,常用Resnet50作为backbone,这里主要介绍resnet50_center_net,其网络结构如下:
可以发现CenterNet网络比较简单,主要包括resnet50提取图片特征,然后是反卷积模块Deconv(三个反卷积)对特征图进行上采样,最后三个分支卷积网络用来预测heatmap, 目标的宽高和目标的中心点坐标。值得注意的是反卷积模块,其包括三个反卷积组,每个组都包括一个3*3的卷积和一个反卷积,每次反卷积都会将特征图尺寸放大一倍,有很多代码中会将反卷积前的3x3的卷积替换为DCNv2(https://github.com/CharlesShang/DCNv2)(Deformable ConvetNets V2)来提高模型拟合能力。
3、CenterNet的模型计算流程如下:

4、详细实现原理
4.1、heatmap(热力图)理解和生成
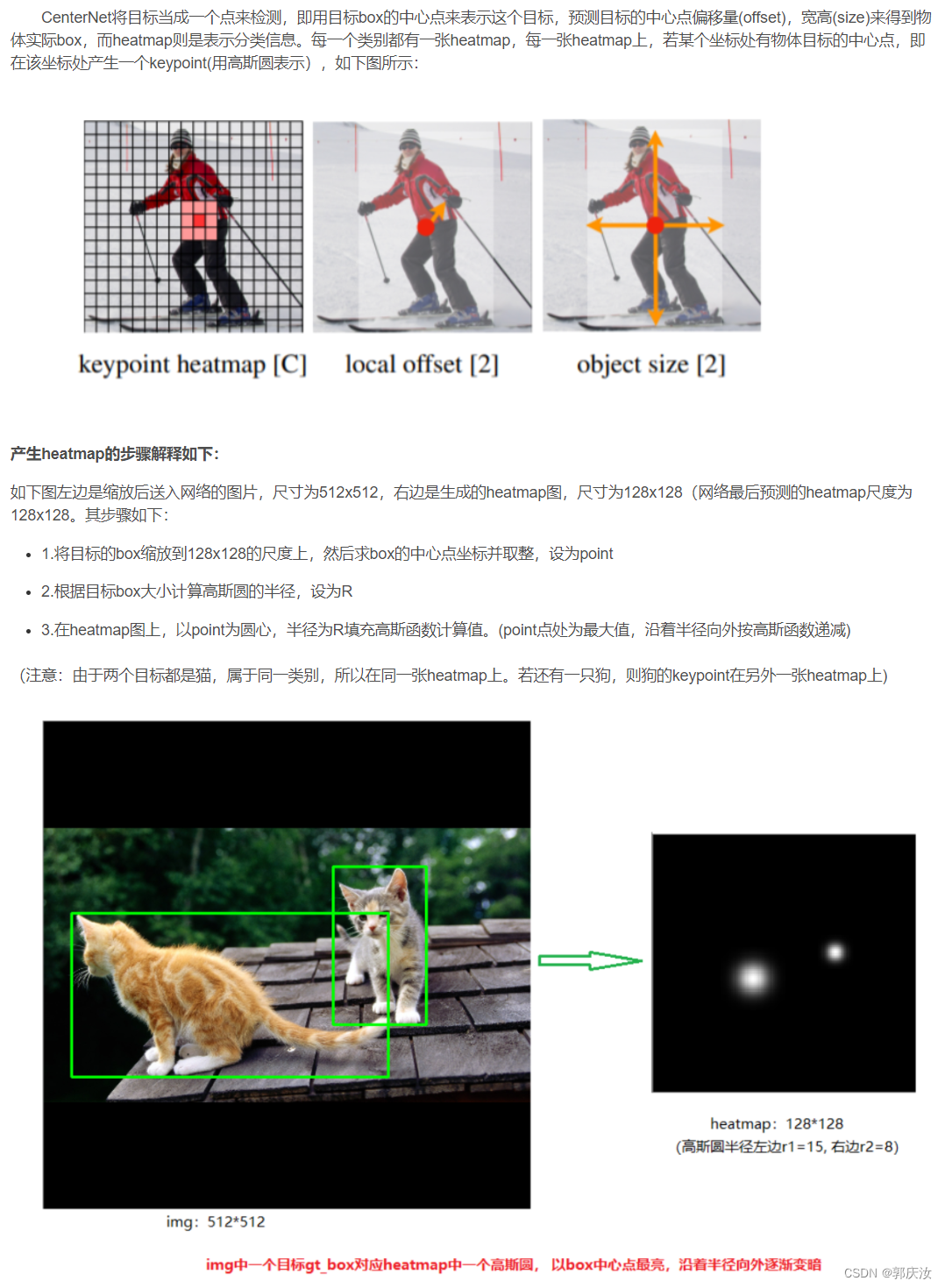
4.1.1 heatmap生成
4.1.2 heatmap高斯函数半径的确定
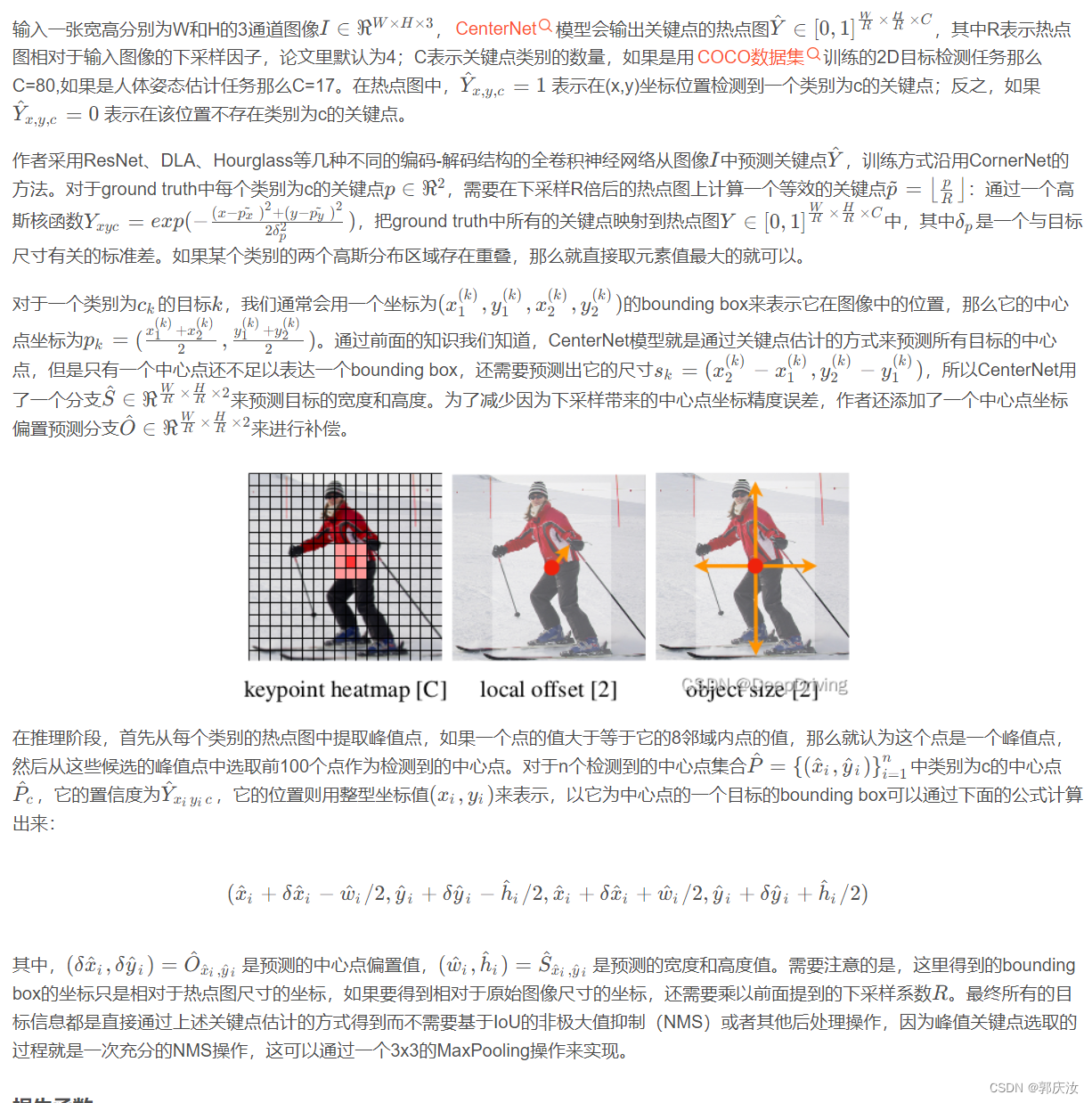
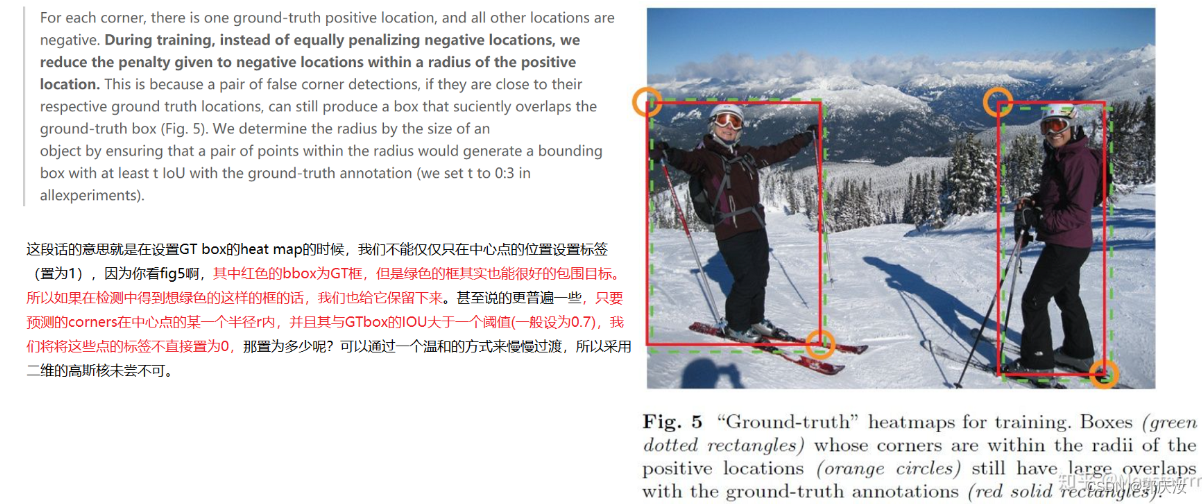
heatmap上的关键点之所以采用二维高斯核来表示,是由于对于在目标中心点附近的一些点,期预测出来的box和gt_box的IOU可能会大于0.7,不能直接对这些预测值进行惩罚,需要温和一点,所以采用高斯核。借用下大佬们的解释,如下图所示:
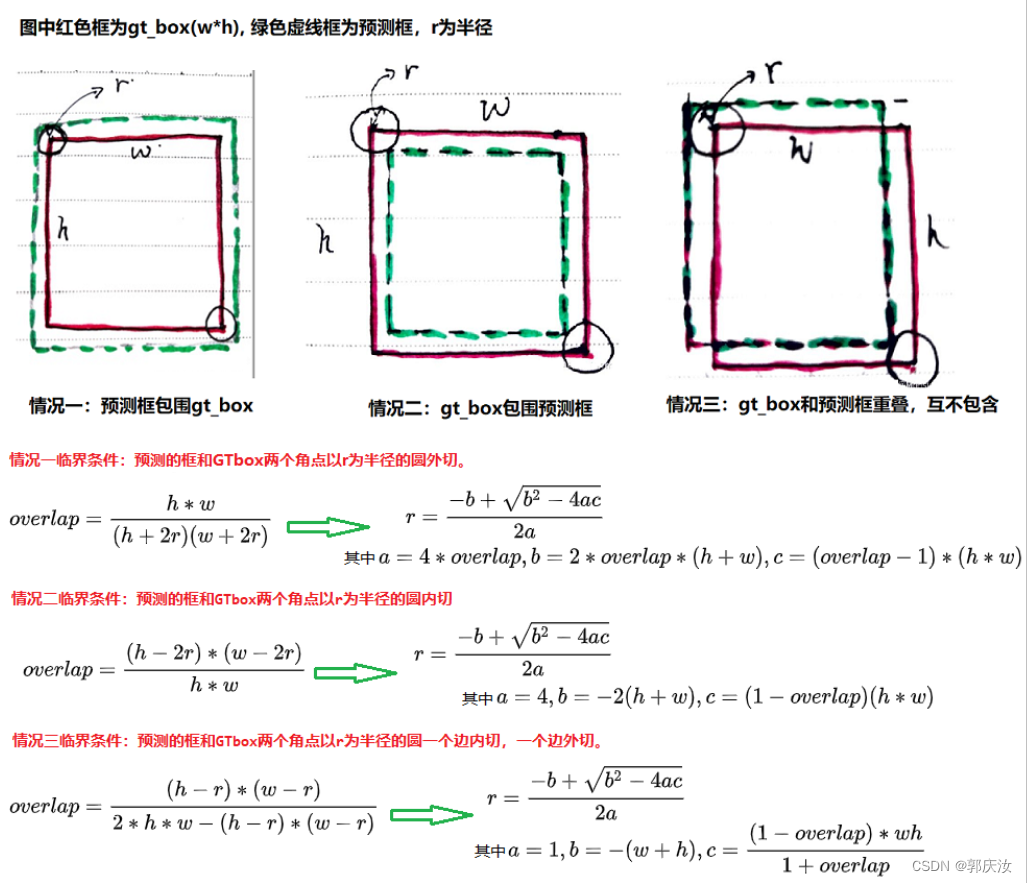
关于高斯圆的半径确定,主要还是依赖于目标box的宽高,其计算方法为下图所示。 实际情况中会取IOU=0.7,即下图中的overlap=0.7作为临界值,然后分别计算出三种情况的半径,取最小值作为高斯核的半径r:
def gaussian_radius(det_size, min_overlap=0.7):
height, width = det_size
a1 = 1
b1 = (height + width)
c1 = width * height * (1 - min_overlap) / (1 + min_overlap)
sq1 = np.sqrt(b1 ** 2 - 4 * a1 * c1)
r1 = (b1 + sq1) / 2 # 此处没有乘以a1,不过影响不大
a2 = 4
b2 = 2 * (height + width)
c2 = (1 - min_overlap) * width * height
sq2 = np.sqrt(b2 ** 2 - 4 * a2 * c2)
r2 = (b2 + sq2) / 2
a3 = 4 * min_overlap
b3 = -2 * min_overlap * (height + width)
c3 = (min_overlap - 1) * width * height
sq3 = np.sqrt(b3 ** 2 - 4 * a3 * c3)
r3 = (b3 + sq3) / 2
return min(r1, r2, r3)
4.1.3 CenterNet中生成高斯核的部分代码进行解析:
二维高斯函数的公式
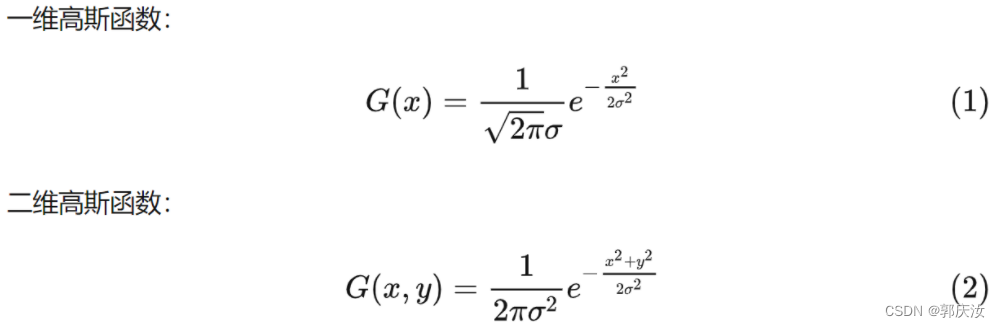
CenterNet源码中二维高斯函数实现如下:
def gaussian2D(shape, sigma=1):
m, n = [(ss - 1.) / 2. for ss in shape]
y, x = np.ogrid[-m:m + 1, -n:n + 1]#np.orgin 生成二维网格坐标
h = np.exp(-(x * x + y * y) / (2 * sigma * sigma))
h[h < np.finfo(h.dtype).eps * h.max()] = 0 #np.finfo()常用于生成一定格式,数值较小的偏置项eps,以避免分母或对数变量为零
return h
高斯核半径的计算
从代码上看就是一元二次方程的求根公式
这里要注意的代码中计算高斯半径是根据框的角点进行计算,而在Centernet中需要计算的是框的中心点的高斯半径,其实道理是一样的 Centernet 框的角点的偏移可以近似对于框中心点的偏移
情况一:两角点均在真值框内
情况二:两角点均在真值框外
情况三:一角点在真值框内,一角点在真值框外
求解代码:
def gaussian_radius(det_size, min_overlap=0.7):
height, width = det_size
a1 = 1
b1 = (height + width)
c1 = width * height * (1 - min_overlap) / (1 + min_overlap)
sq1 = np.sqrt(b1 ** 2 - 4 * a1 * c1)
r1 = (b1 + sq1) / 2
a2 = 4
b2 = 2 * (height + width)
c2 = (1 - min_overlap) * width * height
sq2 = np.sqrt(b2 ** 2 - 4 * a2 * c2)
r2 = (b2 + sq2) / 2
a3 = 4 * min_overlap
b3 = -2 * min_overlap * (height + width)
c3 = (min_overlap - 1) * width * height
sq3 = np.sqrt(b3 ** 2 - 4 * a3 * c3)
r3 = (b3 + sq3) / 2
return min(r1, r2, r3)
CenterNet源码中 draw_umich_gaussian 函数实现如下:
def draw_umich_gaussian(heatmap, center, radius, k=1):
diameter = 2 * radius + 1
gaussian = gaussian2D((diameter, diameter), sigma=diameter / 6)
x, y = int(center[0]), int(center[1])
height, width = heatmap.shape[0:2]
left, right = min(x, radius), min(width - x, radius + 1)
top, bottom = min(y, radius), min(height - y, radius + 1)
masked_heatmap = heatmap[y - top:y + bottom, x - left:x + right]
masked_gaussian = gaussian[radius - top:radius + bottom, radius - left:radius + right]
if min(masked_gaussian.shape) > 0 and min(masked_heatmap.shape) > 0: # TODO debug
np.maximum(masked_heatmap, masked_gaussian * k, out=masked_heatmap)#逐个元素比较大小,保留大的值
return heatmap
import numpy as np
import math
import xml.etree.ElementTree as ET
import glob
from image import draw_dense_reg, draw_msra_gaussian, draw_umich_gaussian
from image import get_affine_transform, affine_transform, gaussian_radius
data_dir = r"*.jpg"
a_file = glob.glob(data_dir)[0]
print(a_file, a_file.replace(".jpg", ".xml"))
tree = ET.parse(a_file.replace(".jpg", ".xml"))
root = tree.getroot()
size = root.find('size')
width = int(size.find('width').text)
height = int(size.find('height').text)
print(f"原图宽:{width} 高:{height}")
num_classes = 3
output_h = height
output_w = width
hm = np.zeros((num_classes, output_h, output_w), dtype=np.float32)
anns = []
for obj in root.iter('object'):
bbox = obj.find('bndbox')
cate = obj.find('name').text
# print(cate, bbox.find("xmin").text, bbox.find("xmax").text,
# bbox.find("ymin").text, bbox.find("ymax").text)
xyxy = [int(bbox.find("xmin").text), int(bbox.find("ymin").text),
int(bbox.find("xmax").text),int(bbox.find("ymax").text)]
anns.append({"bbox" : xyxy,'category_id':int(cate)})
num_objs = len(anns)
flipped = False #是否经过全图翻转
import matplotlib.pyplot as plt
plt.figure(figsize=(19, 6))
plt.ion()
plt.subplot(131)
img = plt.imread(a_file)
plt.title('Origin_img')
plt.imshow(img)
for k in range(num_objs):
ann = anns[k]
bbox = ann['bbox']
cls_id = ann['category_id']
if flipped:
bbox[[0, 2]] = width - bbox[[2, 0]] - 1
# bbox[:2] = affine_transform(bbox[:2], trans_output)# 仿射变换
# bbox[2:] = affine_transform(bbox[2:], trans_output)
# bbox[[0, 2]] = np.clip(bbox[[0, 2]], 0, output_w - 1)#裁剪
# bbox[[1, 3]] = np.clip(bbox[[1, 3]], 0, output_h - 1)
h, w = bbox[3] - bbox[1], bbox[2] - bbox[0]
if h > 0 and w > 0:
radius = gaussian_radius((math.ceil(h), math.ceil(w)))
radius = max(0, int(radius))
# radius = self.opt.hm_gauss if self.opt.mse_loss else radius
ct = np.array(
[(bbox[0] + bbox[2]) / 2, (bbox[1] + bbox[3]) / 2], dtype=np.float32)
ct_int = ct.astype(np.int32)
plt.subplot(133)
hm_out, gaussian = draw_umich_gaussian(hm[cls_id], ct_int, radius)
plt.title('Umich Heatmap')
# hm_out = draw_msra_gaussian(hm[cls_id], ct_int, radius)
# print(hm_out.shape)
# plt.title("Mara Heatmap")
plt.text(ct[0], ct[1], f"(class:{cls_id})", c='white')
plt.plot([bbox[0], bbox[2], bbox[2], bbox[0], bbox[0]], [bbox[1], bbox[1], bbox[3], bbox[3], bbox[1]])
plt.imshow(hm_out)
plt.subplot(132)
plt.title(f'Gaussian: bbox_h={h},bbox_w={w}, radius={radius}')
plt.imshow(gaussian)
plt.pause(2)
5、预处理数据增强
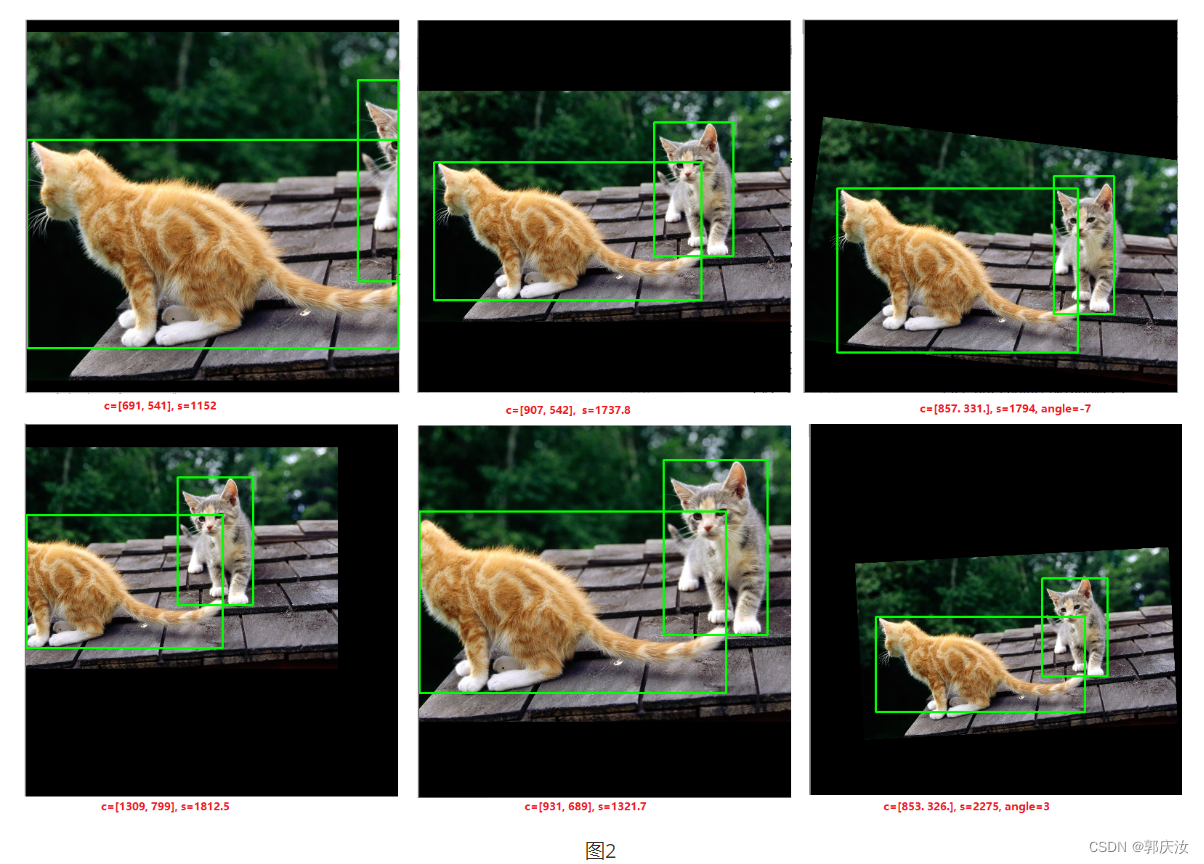
关于CenterNet还有一点值得注意的是其数据增强部分,采用了仿射变换warpAffine,其实就是对原图中进行裁剪,然后缩放到512x512的大小(长边缩放,短边补0)。实际过程中先确定一个中心点,和一个裁剪的长宽,然后进行仿射变换,如下图所示,绿色框住的图片会被裁剪出来,然后缩放到512x512(实际效果见图二中六个子图中第一个)
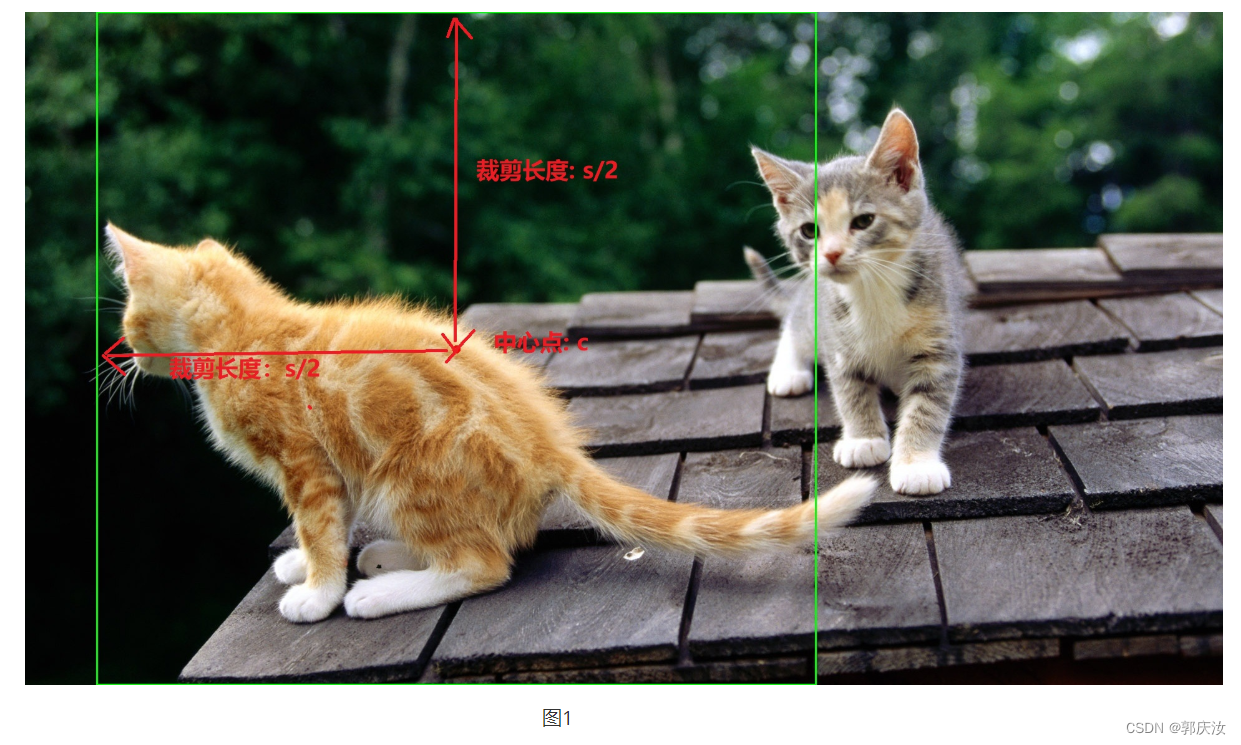
下面是上图选择不同中心点和长度进行仿射变换得到的样本。除了中心点,裁剪长度,仿射变换还可以设置角度,CenterNet中没有设置角度(代码中为0),是由于加上旋转角度后,gt_box会变的不是很准确,如最右边两个旋转样本
6、损失函数

FocalLoss代码:
原作者的代码是没有对pred输出做限制,我在实际训练中如果不加以限制,则会导致pred经过log计算之后的输出为NaN或Inf,所以使用torch.clamp()进行截取,相关代码如下:
def _neg_loss(pred, gt):
''' Modified focal loss. Exactly the same as CornerNet.
Runs faster and costs a little bit more memory
Arguments:
pred (batch x c x h x w)
gt_regr (batch x c x h x w)
'''
pos_inds = gt.eq(1).float()
neg_inds = gt.lt(1).float()
neg_weights = torch.pow(1 - gt, 4)
loss = 0
pos_loss = torch.log(pred) * torch.pow(1 - pred, 2) * pos_inds
neg_loss = torch.log(1 - pred) * torch.pow(pred, 2) * neg_weights * neg_inds
num_pos = pos_inds.float().sum()
pos_loss = pos_loss.sum()
neg_loss = neg_loss.sum()
if num_pos == 0:
loss = loss - neg_loss
else:
loss = loss - (pos_loss + neg_loss) / num_pos
return loss
WidthHeight和Offset的损失由l1 loss计算,原理比较简单
class L1Loss(nn.Module):
def __init__(self):
super(L1Loss, self).__init__()
def forward(self, output, mask, ind, target):
pred = _transpose_and_gather_feat(output, ind)
mask = mask.unsqueeze(2).expand_as(pred).float()
loss = F.l1_loss(pred * mask, target * mask, reduction='elementwise_mean')
return loss
7、pytorch复现CenterNet目标检测项目
7.1 环境搭建
本项目官方建议pytorch版本是1.4以下,我是用的1.2版本,因为需要编译DCNv2模块**,安装COCOAPI**
1、项目下载
CenterNet_ROOT=/path/to/clone/CenterNet
git clone https://github.com/xingyizhou/CenterNet $CenterNet_ROOT
2、编译DCNv2模块
注意:因为官方提供的DCNv2版本过老,需要去DCNv2官网下载该模块,替换点项目中的该文件
cd $CenterNet_ROOT/src/lib/models/networks/DCNv2
./make.sh
Compile NMS if your want to use multi-scale testing or test ExtremeNet
cd $CenterNet_ROOT/src/lib/external
make
7.2 数据集准备
7-1 在data文件夹下新建两个文件夹:food、image_and_xml;
其中food为你自己数据集的名称,我这里要做的是识别一个菜品的任务,所以命名为food,image_and_xml存放的是你所有的图片和xml文件;
7-2 新建一个python文件,文件代码为xml_to_json,即将voc数据集的xml文件格式转为coco数据集的json文件格式,记得在运行之前要把相应的文件路径以及一些参数设置好;
# coding:utf-8
# 运行前请先做以下工作:
# pip install lxml
# 将所有的图片及xml文件存放到xml_dir指定的文件夹下,并将此文件夹放置到当前目录下
#
import os
import glob
import json
import shutil
import numpy as np
import xml.etree.ElementTree as ET
START_BOUNDING_BOX_ID = 1
save_path = "."
def get(root, name):
return root.findall(name)
def get_and_check(root, name, length):
vars = get(root, name)
if len(vars) == 0:
raise NotImplementedError('Can not find %s in %s.' % (name, root.tag))
if length and len(vars) != length:
raise NotImplementedError('The size of %s is supposed to be %d, but is %d.' % (name, length, len(vars)))
if length == 1:
vars = vars[0]
return vars
def convert(xml_list, json_file):
json_dict = {"images": [], "type": "instances", "annotations": [], "categories": []}
categories = pre_define_categories.copy()
bnd_id = START_BOUNDING_BOX_ID
all_categories = {}
for index, line in enumerate(xml_list):
# print("Processing %s"%(line))
xml_f = line
tree = ET.parse(xml_f)
root = tree.getroot()
filename = os.path.basename(xml_f)[:-4] + ".jpg"
image_id = 20190000001 + index
size = get_and_check(root, 'size', 1)
width = int(get_and_check(size, 'width', 1).text)
height = int(get_and_check(size, 'height', 1).text)
image = {'file_name': filename, 'height': height, 'width': width, 'id': image_id}
json_dict['images'].append(image)
# Currently we do not support segmentation
segmented = get_and_check(root, 'segmented', 1).text
assert segmented == '0'
for obj in get(root, 'object'):
category = get_and_check(obj, 'name', 1).text
if category in all_categories:
all_categories[category] += 1
else:
all_categories[category] = 1
if category not in categories:
if only_care_pre_define_categories:
continue
new_id = len(categories) + 1
print(
"[warning] category '{}' not in 'pre_define_categories'({}), create new id: {} automatically".format(
category, pre_define_categories, new_id))
categories[category] = new_id
category_id = categories[category]
bndbox = get_and_check(obj, 'bndbox', 1)
xmin = int(float(get_and_check(bndbox, 'xmin', 1).text))
ymin = int(float(get_and_check(bndbox, 'ymin', 1).text))
xmax = int(float(get_and_check(bndbox, 'xmax', 1).text))
ymax = int(float(get_and_check(bndbox, 'ymax', 1).text))
assert (xmax > xmin), "xmax <= xmin, {}".format(line)
assert (ymax > ymin), "ymax <= ymin, {}".format(line)
o_width = abs(xmax - xmin)
o_height = abs(ymax - ymin)
ann = {'area': o_width * o_height, 'iscrowd': 0, 'image_id':
image_id, 'bbox': [xmin, ymin, o_width, o_height],
'category_id': category_id, 'id': bnd_id, 'ignore': 0,
'segmentation': []}
json_dict['annotations'].append(ann)
bnd_id = bnd_id + 1
for cate, cid in categories.items():
cat = {'supercategory': 'food', 'id': cid, 'name': cate}
json_dict['categories'].append(cat)
json_fp = open(json_file, 'w')
json_str = json.dumps(json_dict)
json_fp.write(json_str)
json_fp.close()
print("------------create {} done--------------".format(json_file))
print("find {} categories: {} -->>> your pre_define_categories {}: {}".format(len(all_categories),
all_categories.keys(),
len(pre_define_categories),
pre_define_categories.keys()))
print("category: id --> {}".format(categories))
print(categories.keys())
print(categories.values())
if __name__ == '__main__':
# 定义你自己的类别
classes = ['aaa', 'bbb', 'ccc', 'ddd', 'eee', 'fff']
pre_define_categories = {}
for i, cls in enumerate(classes):
pre_define_categories[cls] = i + 1
# 这里也可以自定义类别id,把上面的注释掉换成下面这行即可
# pre_define_categories = {'a1': 1, 'a3': 2, 'a6': 3, 'a9': 4, "a10": 5}
only_care_pre_define_categories = True # or False
# 保存的json文件
save_json_train = 'train_food.json'
save_json_val = 'val_food.json'
save_json_test = 'test_food.json'
# 初始文件所在的路径
xml_dir = "./image_and_xml"
xml_list = glob.glob(xml_dir + "/*.xml")
xml_list = np.sort(xml_list)
# 打乱数据集
np.random.seed(100)
np.random.shuffle(xml_list)
# 按比例划分打乱后的数据集
train_ratio = 0.8
val_ratio = 0.1
train_num = int(len(xml_list) * train_ratio)
val_num = int(len(xml_list) * val_ratio)
xml_list_train = xml_list[:train_num]
xml_list_val = xml_list[train_num: train_num+val_num]
xml_list_test = xml_list[train_num+val_num:]
# 将xml文件转为coco文件,在指定目录下生成三个json文件(train/test/food)
convert(xml_list_train, save_json_train)
convert(xml_list_val, save_json_val)
convert(xml_list_test, save_json_test)
# # 将图片按照划分后的结果进行存放
# if os.path.exists(save_path + "/annotations"):
# shutil.rmtree(save_path + "/annotations")
# os.makedirs(save_path + "/annotations")
# if os.path.exists(save_path + "/images_divide/train"):
# shutil.rmtree(save_path + "/images_divide/train")
# os.makedirs(save_path + "/images_divide/train")
# if os.path.exists(save_path + "/images_divide/val"):
# shutil.rmtree(save_path + "/images_divide/val")
# os.makedirs(save_path + "/images_divide/val")
# if os.path.exists(save_path + "/images_divide/test"):
# shutil.rmtree(save_path + "/images_divide/test")
# os.makedirs(save_path + "/images_divide/test")
# # 按需执行,生成3个txt文件,存放相应的文件名称
# f1 = open("./train.txt", "w")
# for xml in xml_list_train:
# img = xml[:-4] + ".jpg"
# f1.write(os.path.basename(xml)[:-4] + "\n")
# shutil.copyfile(img, save_path + "/images_divide/train/" + os.path.basename(img))
#
# f2 = open("val.txt", "w")
# for xml in xml_list_val:
# img = xml[:-4] + ".jpg"
# f2.write(os.path.basename(xml)[:-4] + "\n")
# shutil.copyfile(img, save_path + "/images_divide/val/" + os.path.basename(img))
#
# f3 = open("test.txt", "w")
# for xml in xml_list_val:
# img = xml[:-4] + ".jpg"
# f2.write(os.path.basename(xml)[:-4] + "\n")
# shutil.copyfile(img, save_path + "/images_divide/test/" + os.path.basename(img))
#
# f1.close()
# f2.close()
# f3.close()
print("-" * 50)
print("train number:", len(xml_list_train))
print("val number:", len(xml_list_val))
print("test number:", len(xml_list_val))
运行完之后,会得到三个json文件,分别代表训练,测试和验证。
7-3 进入到food数据集下,新建两个文件夹:images和annotations:
images:存放你的所有图片文件;
annotations:把上一步生成的三个json文件复制或剪切到这个文件夹下;
7.3 修改配置信息
计算所有的图片的均值和标准差,直接将图片存放到同一个文件夹,把路径改下即可
import cv2, os, argparse
import numpy as np
from tqdm import tqdm
def main():
dirs = r'F:\Pycharm Professonal\CenterNet\CenterNet\data\food\images' # 修改你自己的图片路径
img_file_names = os.listdir(dirs)
m_list, s_list = [], []
for img_filename in tqdm(img_file_names):
img = cv2.imread(dirs + '/' + img_filename)
img = img / 255.0
m, s = cv2.meanStdDev(img)
m_list.append(m.reshape((3,)))
s_list.append(s.reshape((3,)))
m_array = np.array(m_list)
s_array = np.array(s_list)
m = m_array.mean(axis=0, keepdims=True)
s = s_array.mean(axis=0, keepdims=True)
print("mean = ", m[0][::-1])
print("std = ", s[0][::-1])
if __name__ == '__main__':
main()
7-3 写一个数据类
到src/lib/datasets/dataset目录下,新建一个python文件,这里需要自己写一个数据类,我这里命名为food.py,;
(1)第14行的类名改为自己的类型名,这里定义为Food;
(2)第15行的num_class改为自己数据集的类别数;
(3)第16行的default_resolution为默认的分辨率,这里按原作者给出的[512, 512],如果觉得自己的硬件设备跟不上,可以适当的改小,注意上面所计算出来的整个数据集的均值和标准差也要同步;
(4)第17-20行的均值和方差填上去;
(5)第23行super类的继承改为你自己定义的类名称;
(6)修改读取json文件的路径;
(7)修改类别名字和id;
总的可参考下面的代码:
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import pycocotools.coco as coco
from pycocotools.cocoeval import COCOeval
import numpy as np
import json
import os
import torch.utils.data as data
class Food(data.Dataset):
num_classes = 6
default_resolution = [512, 512]
mean = np.array([0.472459, 0.475080, 0.482652],
dtype=np.float32).reshape((1, 1, 3))
std = np.array([0.255084, 0.254665, 0.257073],
dtype=np.float32).reshape((1, 1, 3))
def __init__(self, opt, split):
super(Food, self).__init__()
self.data_dir = os.path.join(opt.data_dir, 'food')
self.img_dir = os.path.join(self.data_dir, 'images')
if split == 'val':
self.annot_path = os.path.join(
self.data_dir, 'annotations', 'val_food.json')
else:
if opt.task == 'exdet':
self.annot_path = os.path.join(
self.data_dir, 'annotations', 'train_food.json')
if split == 'test':
self.annot_path = os.path.join(
self.data_dir, 'annotations', 'test_food.json')
else:
self.annot_path = os.path.join(
self.data_dir, 'annotations', 'train_food.json')
self.max_objs = 128
self.class_name = [
'__background__', 'aaa', 'bbb', 'ccc', 'ddd', 'eee', 'fff']
self._valid_ids = [1, 2, 3, 4, 5, 6]
self.cat_ids = {v: i for i, v in enumerate(self._valid_ids)}
self.voc_color = [(v // 32 * 64 + 64, (v // 8) % 4 * 64, v % 8 * 32) \
for v in range(1, self.num_classes + 1)]
self._data_rng = np.random.RandomState(123)
self._eig_val = np.array([0.2141788, 0.01817699, 0.00341571],
dtype=np.float32)
self._eig_vec = np.array([
[-0.58752847, -0.69563484, 0.41340352],
[-0.5832747, 0.00994535, -0.81221408],
[-0.56089297, 0.71832671, 0.41158938]
], dtype=np.float32)
# self.mean = np.array([0.485, 0.456, 0.406], np.float32).reshape(1, 1, 3)
# self.std = np.array([0.229, 0.224, 0.225], np.float32).reshape(1, 1, 3)
self.split = split
self.opt = opt
print('==> initializing food {} data.'.format(split))
self.coco = coco.COCO(self.annot_path)
self.images = self.coco.getImgIds()
self.num_samples = len(self.images)
print('Loaded {} {} samples'.format(split, self.num_samples))
@staticmethod
def _to_float(x):
return float("{:.2f}".format(x))
def convert_eval_format(self, all_bboxes):
# import pdb; pdb.set_trace()
detections = []
for image_id in all_bboxes:
for cls_ind in all_bboxes[image_id]:
category_id = self._valid_ids[cls_ind - 1]
for bbox in all_bboxes[image_id][cls_ind]:
bbox[2] -= bbox[0]
bbox[3] -= bbox[1]
score = bbox[4]
bbox_out = list(map(self._to_float, bbox[0:4]))
detection = {
"image_id": int(image_id),
"category_id": int(category_id),
"bbox": bbox_out,
"score": float("{:.2f}".format(score))
}
if len(bbox) > 5:
extreme_points = list(map(self._to_float, bbox[5:13]))
detection["extreme_points"] = extreme_points
detections.append(detection)
return detections
def __len__(self):
return self.num_samples
def save_results(self, results, save_dir):
json.dump(self.convert_eval_format(results),
open('{}/results.json'.format(save_dir), 'w'))
def run_eval(self, results, save_dir):
# result_json = os.path.join(save_dir, "results.json")
# detections = self.convert_eval_format(results)
# json.dump(detections, open(result_json, "w"))
self.save_results(results, save_dir)
coco_dets = self.coco.loadRes('{}/results.json'.format(save_dir))
coco_eval = COCOeval(self.coco, coco_dets, "bbox")
coco_eval.evaluate()
coco_eval.accumulate()
coco_eval.summarize()
7-4 将数据集加入src/lib/datasets/dataset_factory里面
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
from .sample.ddd import DddDataset
from .sample.exdet import EXDetDataset
from .sample.ctdet import CTDetDataset
from .sample.multi_pose import MultiPoseDataset
from .dataset.coco import COCO
from .dataset.pascal import PascalVOC
from .dataset.kitti import KITTI
from .dataset.coco_hp import COCOHP
from .dataset.food import Food
dataset_factory = {
'coco': COCO,
'pascal': PascalVOC,
'kitti': KITTI,
'coco_hp': COCOHP,
'food': Food
}
_sample_factory = {
'exdet': EXDetDataset,
'ctdet': CTDetDataset,
'ddd': DddDataset,
'multi_pose': MultiPoseDataset
}
def get_dataset(dataset, task):
class Dataset(dataset_factory[dataset], _sample_factory[task]):
pass
return Dataset
7-5 在/src/lib/opts.py文件中修改
self.parser.add_argument('--dataset', default='food',
help='food | coco | kitti | coco_hp | pascal')
7-6 修改src/lib/utils/debugger.py文件(变成自己数据的类别和名字,前后数据集名字一定保持一致)
(1)第45行下方加入两行:
elif num_classes == 6 or dataset == 'food':
self.names = food_class_name
(2)第460行下方加入自己所定义的类别,不包含背景:
food_class_name = ['aaa', 'bbb', 'ccc', 'ddd', 'eee', 'fff']
7.4 训练数据
在./src/目录下,运行main.py文件,这里food改成你自己要保存的实验结果文件夹名称即可:
7.4.1 不加载预训练权重:
python main.py ctdet --exp_id food --batch_size 32 --lr 1.25e-4 --gpus 0
7.4.2 加载预训练权重:
python main.py ctdet --exp_id food --batch_size 32 --lr 1.25e-4 --gpus 0 --load_model ../models/ctdet_dla_2x.pth
7.4.3 多卡训练,其中master_batch_sizes 表示的是你在主GPU上要放置多大的batch_size,其余分配到其它卡上:
python main.py ctdet --exp_id food --batch_size 32 --lr 1.25e-4 --gpus 0,1 --load_model ../models/ctdet_dla_2x.pth --master_batch_size 8
如果运行报错,可参考以下多GPU训练语句
CUDA_VISIBLE_DEVICES=0,3 python -m torch.distributed.launch --nproc_per_node=2 --use_env train_multi_GPU.py
7.4.4 断点恢复训练,比如你将结果保存在这个exp_id=food,那么food文件夹下就会有model_last.pth这个,想继续恢复训练:
python main.py ctdet --exp_id food --batch_size 32 --lr 1.25e-4 --gpus 0 --resume
若提示报错,则尝试修改opts文件中的num_workers改为0,或者将batch_size调小。
训练完成后,在./exp/ctdet/food/文件夹下会出现一堆文件;
其中,model_last是最后一次epoch的模型;model_best是val最好的模型;
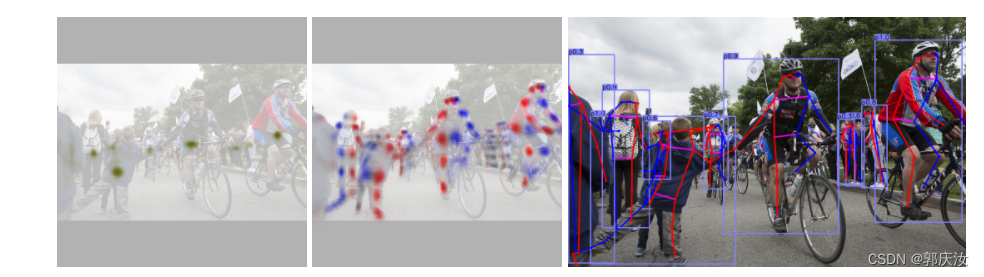
7.5 验证模型
运行demo文件检查下训练的模型,–demo设置你要预测的图片/图片文件夹/视频所在的路径;
也可以加入参数–debug 2 查看heatMap输出效果
7.5.1 原始预测
python demo.py ctdet --demo ../data/food/images/food1.jpg --load_model ../exp/ctdet/food/model_best.pth
7.5.2 带数据增强预测
python demo.py ctdet --demo ../data/food/images/food1.jpg --load_model ../exp/ctdet/food/model_best.pth --flip_test
7.5.3 多尺度预测
python demo.py ctdet --demo ../data/food/images/food1.jpg --load_model ../exp/ctdet/food/model_best.pth --test_scales 0.5,0.75,1.0,1.25,1.5
注意,如果多尺度预测报错,一般就是你自己没有编译nms
编译方法:到 path/to/CenterNet/src/lib/externels 目录下,运行
python setup.py build_ext --inplace
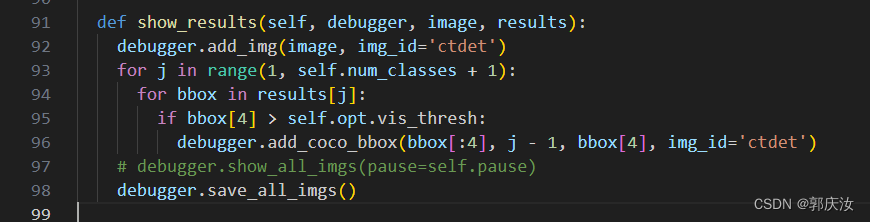
如果需要保存你的预测结果,可以到目录 path/to/CenterNet/src/lib/detecors/ctdet.py下,在show_results函数中的末尾加入这句:
# path替换成你所需要保存的路径,并确定这个文件夹是否存在
debugger.save_all_imgs(path='/CenterNet-master/outputs', genID=True)
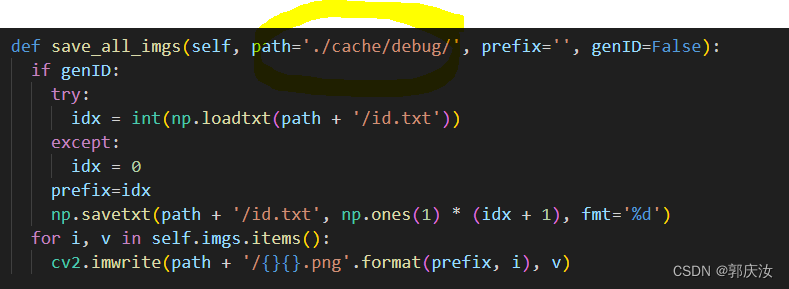
或者可以:下图有默认的存储路径,需要进入相应的类函数内设置默认路径:
7.5.4 人体关键点检测:
python demo.py multi_pose --demo /path/to/image/or/folder/or/video/or/webcam --load_model ../models/multi_pose_dla_3x.pth
也可以加入参数–debug 2 查看heatMap输出效果
注意:也需要修改对应模块的保存路径,否则报错
7.6 测试数据
python test.py --exp_id food --not_prefetch_test ctdet --load_model ../CenterNet/exp/ctdet/food/model_best.pth
7.7 批量保存每张图片的预测结果(bbox,id,score)
7.7.1 进入到CenterNet/src/lib/utils/debugger.py,Ctrl+F找到add_coco_bbox()这个方法,将方法替换为
def add_coco_bbox(self, bbox, cat, conf=1, show_txt=True, img_id='default'):
bbox = np.array(bbox, dtype=np.int32)
# cat = (int(cat) + 1) % 80
cat = int(cat)
# print('cat', cat, self.names[cat])
c = self.colors[cat][0][0].tolist()
if self.theme == 'white':
c = (255 - np.array(c)).tolist()
txt = '{}{:.1f}'.format(cat, conf)
bbox_info = [int(bbox[0]), int(bbox[1]), int(bbox[2]), int(bbox[3])]
info = [bbox_info, self.names[cat], float(conf)]
font = cv2.FONT_HERSHEY_SIMPLEX
cat_size = cv2.getTextSize(txt, font, 0.5, 2)[0]
cv2.rectangle(
self.imgs[img_id], (bbox[0], bbox[1]), (bbox[2], bbox[3]), c, 2)
if show_txt:
cv2.rectangle(self.imgs[img_id],
(bbox[0], bbox[1] - cat_size[1] - 2),
(bbox[0] + cat_size[0], bbox[1] - 2), c, -1)
cv2.putText(self.imgs[img_id], txt, (bbox[0], bbox[1] - 2),
font, 0.5, (0, 0, 0), thickness=1, lineType=cv2.LINE_AA)
return info
这里info便保存了每张图片的每个预测框,对应的类别和置信度信息。
7.7.2 进入到CenterNet/src/lib/detectors/ctdet.py,这个文件夹当中,找到show_results这个方法,替换为
def show_results(self, debugger, image, results):
debugger.add_img(image, img_id='ctdet')
infos = []
for j in range(1, self.num_classes + 1):
for bbox in results[j]:
if bbox[4] > self.opt.vis_thresh:
info = debugger.add_coco_bbox(bbox[:4], j - 1, bbox[4], img_id='ctdet')
infos.append(info)
debugger.show_all_imgs(pause=self.pause)
return infos
7.7.3 进入到CenterNet/src/lib/detectors/base_detector.py,找到run这个方法,替换为:
def run(self, image_or_path_or_tensor, meta=None):
load_time, pre_time, net_time, dec_time, post_time = 0, 0, 0, 0, 0
merge_time, tot_time = 0, 0
debugger = Debugger(dataset=self.opt.dataset, ipynb=(self.opt.debug == 3),
theme=self.opt.debugger_theme)
start_time = time.time()
pre_processed = False
if isinstance(image_or_path_or_tensor, np.ndarray):
image = image_or_path_or_tensor
elif type(image_or_path_or_tensor) == type(''):
image = cv2.imread(image_or_path_or_tensor)
else:
image = image_or_path_or_tensor['image'][0].numpy()
pre_processed_images = image_or_path_or_tensor
pre_processed = True
loaded_time = time.time()
load_time += (loaded_time - start_time)
detections = []
for scale in self.scales: # scales = [1]
scale_start_time = time.time()
if not pre_processed:
# 运行这里
images, meta = self.pre_process(image, scale, meta)
else:
# import pdb; pdb.set_trace()
images = pre_processed_images['images'][scale][0]
meta = pre_processed_images['meta'][scale]
meta = {k: v.numpy()[0] for k, v in meta.items()}
images = images.to(self.opt.device)
torch.cuda.synchronize()
pre_process_time = time.time()
pre_time += pre_process_time - scale_start_time
output, dets, forward_time = self.process(images, return_time=True)
torch.cuda.synchronize()
net_time += forward_time - pre_process_time
decode_time = time.time()
dec_time += decode_time - forward_time
if self.opt.debug >= 2:
self.debug(debugger, images, dets, output, scale)
dets = self.post_process(dets, meta, scale)
torch.cuda.synchronize()
post_process_time = time.time()
post_time += post_process_time - decode_time
detections.append(dets)
results = self.merge_outputs(detections)
torch.cuda.synchronize()
end_time = time.time()
merge_time += end_time - post_process_time
tot_time += end_time - start_time
if self.opt.debug >= 1:
info = self.show_results(debugger, image, results)
return {'results': results, 'tot': tot_time, 'load': load_time,
'pre': pre_time, 'net': net_time, 'dec': dec_time,
'post': post_time, 'merge': merge_time}, info
7.7.4 最后将CenterNet/src/demo.py 这个文件的内容替换为:
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import _init_paths
import os
import cv2
import json
from opts import opts
from detectors.detector_factory import detector_factory
image_ext = ['jpg', 'jpeg', 'png', 'webp']
video_ext = ['mp4', 'mov', 'avi', 'mkv']
time_stats = ['tot', 'load', 'pre', 'net', 'dec', 'post', 'merge']
def demo():
os.environ['CUDA_VISIBLE_DEVICES'] = opt.gpus_str
opt.debug = max(opt.debug, 1)
Detector = detector_factory[opt.task]
detector = Detector(opt)
if opt.demo == 'webcam' or \
opt.demo[opt.demo.rfind('.') + 1:].lower() in video_ext:
cam = cv2.VideoCapture(0 if opt.demo == 'webcam' else opt.demo)
detector.pause = False
while True:
_, img = cam.read()
cv2.imshow('input', img)
ret = detector.run(img)
time_str = ''
for stat in time_stats:
time_str = time_str + '{} {:.3f}s |'.format(stat, ret[stat])
print(time_str)
if cv2.waitKey(1) == 27:
return # esc to quit
else:
if os.path.isdir(opt.demo):
image_names = []
ls = os.listdir(opt.demo)
for file_name in sorted(ls):
ext = file_name[file_name.rfind('.') + 1:].lower()
if ext in image_ext:
image_names.append(os.path.join(opt.demo, file_name))
else:
image_names = [opt.demo]
results = {}
for (image_name) in image_names:
ret, info = detector.run(image_name)
save_name = image_name.split('/')[-1]
results[save_name] = info
time_str = ''
for stat in time_stats:
time_str = time_str + '{} {:.3f}s |'.format(stat, ret[stat])
print(time_str)
results_str = json.dumps(results)
with open(opt.save_dir+"/{}.json".format(opt.exp_id), 'w') as json_file:
json_file.write(results_str)
if __name__ == '__main__':
opt = opts().init()
demo()
上面将预测信息保存为一个json文件,保存路径可自己设置。







![[pgrx开发postgresql数据库扩展]7.返回序列的函数编写(2)表序列](https://img-blog.csdnimg.cn/img_convert/c0f3c08d10ab46ada568f0a2994ac713.webp?x-oss-process=image/format,png)