目录
摘 要 I
ABSTRCT II
前言 III
1.长臂机器人组概况 1
1.1国内外发展状况 1
1.2研究意义 2
1.2.1长臂机器人组研究现状 2
1.2.2长臂机器人组研究方向 3
1.3本课题意义和目的 4
1.3.1本课题的意义 4
1.3.2本课题的目的 4
2.长臂机器人组的组成分类及设计分析 6
2.1 长臂机器人组的组成 6
2.2 长臂机器人组的分类 7
2.2.1 按使用范围分类: 7
2.2.2按驱动方式分类: 7
2.2.3按运动坐标型式分类: 8
2.3 长臂机器人组的设计分析 9
2.3.1长臂机器人组工作环境分析 9
2.3.2长臂机器人组直角运动结构分析 9
2.3.3驱动机构分析 10
2.3.4控制系统分析 10
3 总体设计 12
3.1 原始数据 12
3.2 方案初步设计 12
3.2.1 方案拟定 12
3.2.2 驱动方式选择 13
3.2.3 传动方式选择 14
3.2.4 电动机及联轴器选择 15
3.3 方案评估分析 18
4 长臂机器人组系统设计与计算 19
4.1长臂机器人组的结构设计 19
4.2直角坐标运动机构设计 20
4.2.1传动丝杠的设计 20
4.2.2轴承选择及校核 27
4.2.3导轨的设计 28
4.2.4 驱动系统校核 30
4.3 支撑架设计 33
4.3.1支撑部件的合理安排 34
4.3.2支撑部件的截面形状 35
5 运动结构仿真 36
5.1数控机床长臂机器人组运动机构仿真 36
5.1.1建立一个X方向的导轨支撑架 36
5.1.2建立整个运动系统的仿真 40
5.2上下料长臂机器人组整体机构仿真 41
总 结 43
致 谢 44
参考文献 45
2.长臂机器人组的组成分类及设计分析
2.1 长臂机器人组的组成
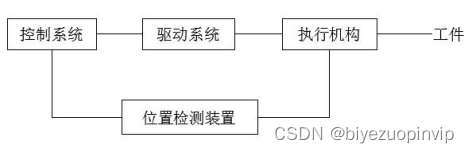
图2.1 家电生产线长臂机器人组的组成框图

图2.2 家电生产线长臂机器人组示意图
一般来说,长臂机器人组主要有以下几部分组成:
1.执行机构 (或称手部、臂部) 包括手指、手腕、手臂、传动机构等,主要起抓取、改变零件(设备)方向和放置物件位置的作用。
2.驱动系统 它是机械机构的运动动力(也称动力源),常用的有液压、气压及电力三种驱动形式。
3.控制系统 它是长臂机器人组动作的“指挥官”,它主要用来完成控制长臂机器人组的动作顺序、位置和时间(甚至速度与加速度)等。
4.位置检测装置 它是通过各种装置(行程检测装置和压力传感装置、反馈装置)检测长臂机器人组的位置,及将长臂机器人组的位置信息反馈给计算机。
2.2 长臂机器人组的分类
长臂机器人组从使用范围、运动坐标形式以及驱动方式三个方面的分类分别为:
2.2.1 按使用范围分类:
(1)专用长臂机器人组
一般只采用固定程序,无单独控制系统的机械装置。专用长臂机器人组主要是具有运动单一、工作对象单一、结构简单、成本较低等特点,适用于大批量的自动化家电生产,特别是自动换刀长臂机器人组,如数控机床坐标运动、自动线的上、下料长臂机器人组以及加工中心三维运动。它从某种机器或家电生产线自动抓取物件或操作某一工具,例如毛坯上下料长臂机器人组这种长臂机器人组结构较简单,成本较低,适用于动作比较简单的大批量家电生产的场合。
(2)通用长臂机器人组
指具有可编程控制系统的、动作灵活多样的长臂机器人组,能够自动完成传送物件或操作某些工具的机械装置。在性能范围内,其动作程序是可变的,通过调整可在不同场合使用,驱动系统和控制系统是独立的。通用长臂机器人组的工作范围大、定位精度高、通用性强,适用于不断变换家电生产品种的中小批量自动化的家电生产。通用长臂机器人组按其定位和控制方式的不同,可分为简易型和伺服型两种。简易型仅可以是点位控制,故属于程序控制类型;伺服型可以是点位控制,也可以是连续轨迹控制,一般属于数字控制类型。
2.2.2按驱动方式分类:
(1)液压驱动长臂机器人组 液压驱动长臂机器人组是以油液的压力来驱动执行机构运动的长臂机器人组。其主要特点是:液压驱动力较大可以提供几百公斤以上的力,传动机构采用“背压”措施使运动平稳、结构紧凑。但是液压系统对密封装置要求严格,容易出现油液的泄漏,对长臂机器人组的工作性能有很大的影响,而且不宜在高温、低温下工作。若是长臂机器人组采用电、液伺服驱动系统,可实现连续轨迹控制扩大长臂机器人组的适用范围,缺点是电液伺服阀的制造精度高,对油液纯净度要求较高,因此过滤要求严格,成本高。

















![[附源码]Python计算机毕业设计Django的手机电商网站](https://img-blog.csdnimg.cn/c4f36cc670764085ba60959b46f65752.png)