本文以求解整数规划模型为例,提供分支定界算法的 Python 代码框架,期待完善、指正和交流。
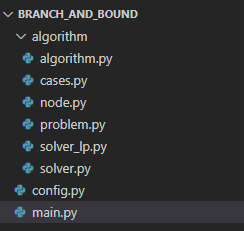
文件结构
具体代码
problem.py
定义问题的格式:
from typing import List
class Problem(object):
"""
problem
"""
def __init__(self, problem_type: str,
num_var: int, mat_cons: List[List[int or float]], obj_coef: List[int or float]) -> None:
"""
initialise
:param problem_type: problem type
:param num_var: number of variables
:param mat_cons: constraint coefficients matrix
:param obj_coef: objective coefficients list
"""
self.problem_type = problem_type
self.num_var = num_var
self.mat_cons = mat_cons
self.obj_coef = obj_coef
solver.py
定义问题求解模块的基类:
from algorithm.problem import Problem
class Solver(object):
"""
problem solver
"""
def __init__(self, problem: Problem) -> None:
"""
initialise
:param problem: problem to solve
"""
self.num_var = problem.num_var
self.mat_cons = problem.mat_cons
self.obj_coef = problem.obj_coef
# solution status
self.status = 'empty' # {'empty', 'invalid', 'optimal', 'feasible', 'infeasible', 'fail'}
self.obj = None
self.solution = []
def _is_valid(self) -> bool:
return True
def solve(self):
pass
solver_lp.py
继承求解模块基类,针对线性规划问题,编写调用 OR-Tools GLOP 求解器的求解模块子类:
from datetime import datetime
import rich
from ortools.linear_solver import pywraplp
from config import ACCURACY
from algorithm.solver import Solver
from algorithm.problem import Problem
class SolverLP(Solver):
"""
problem solver, LP model
"""
def __init__(self, problem: Problem) -> None:
"""
initialise
:param problem: problem to solve
"""
super().__init__(problem)
def _is_valid(self) -> bool:
"""
check model format
:return: if model valid
"""
# constraint coefficient lists
for i in range(len(self.mat_cons)):
cons = self.mat_cons[i]
# coefficients list length
if len(cons) != self.num_var + 2:
rich.print(f"Constraint {i} length {len(cons)} invalid, need to be {self.num_var} + 2")
return False
# objective coefficients list length
if len(self.obj_coef) != self.num_var + 1:
rich.print(
f"Objective coefficients list length {len(self.obj_coef)} invalid, need to be {self.num_var} + 1")
return False
return True
def solve(self):
"""
solving
"""
if not self._is_valid():
self.status = 'invalid'
return
solver = pywraplp.Solver("lp", problem_type=pywraplp.Solver.GLOP_LINEAR_PROGRAMMING)
x = [solver.NumVar(0, solver.infinity(), 'x_{}'.format(i)) for i in range(self.num_var)]
# constraints
for cons in self.mat_cons:
exp = 0
for j in range(len(cons[: -2])):
exp += cons[j] * x[j]
sign, b = cons[-2], cons[-1]
# index -2 coefficient: negative for <=; 0 for ==; positive for >=
if sign < 0:
solver.Add(exp <= b)
elif sign == 0:
solver.Add(exp == b)
else:
solver.Add(exp >= b)
# objective
obj = 0
for j in range(len(self.obj_coef[: -1])):
obj += self.obj_coef[j] * x[j]
# index -1 coefficient: positive for maximise; otherwise minimise
solver.Minimize(obj) if self.obj_coef[-1] <= 0 else solver.Maximize(obj)
# solve
dts = datetime.now()
status = solver.Solve()
dte = datetime.now()
tm = round((dte - dts).seconds + (dte - dts).microseconds / (10 ** 6), 3)
rich.print(f"LP model solving time: {tm} s")
# result
if status == pywraplp.Solver.OPTIMAL:
self.status = 'optimal'
self.obj = solver.Objective().Value()
self.solution = [x[i].solution_value() for i in range(self.num_var)]
rich.print(f"objective value: {self.obj}")
rich.print(f"solution: {[round(x, ACCURACY) for x in self.solution]}")
elif status == pywraplp.Solver.FEASIBLE:
self.status = 'feasible'
rich.print(f"Didn't get an optimal solution, but a feasible one.")
elif status == pywraplp.Solver.INFEASIBLE:
self.status = 'infeasible'
rich.print(f"The problem does not have a feasible solution.")
else:
self.status = 'fail'
rich.print(f"Failed to solving problem for an unknown reason.")
node.py
分支定界算法的节点模块:
from typing import List
import copy
from config import PROBLEM_TYPES, INSTANCE, ACCURACY
from algorithm.problem import Problem
from algorithm.solver_lp import SolverLP
class Node(object):
"""
branch and bound node
"""
def __init__(self, id: int, father: int or None, new_cons: List[int or float]) -> None:
"""
initialise
:param id: node ID
:param father: father node ID, None for root
:param id: new constraits other than father node's constraints
"""
self.problem: Problem = copy.deepcopy(INSTANCE)
self.problem_type = self.problem.problem_type
self.num_var, self.mat_cons, self.obj_coef = self.problem.num_var, self.problem.mat_cons, self.problem.obj_coef
# check problem type
if self.problem_type not in PROBLEM_TYPES:
raise Exception(f"Problem type {self.problem_type} invalid!")
self.id = id
self.father = father
self.new_cons = new_cons
self.depth = None
# solution
self.status = 'empty' # {'empty', 'feasible', 'relax', 'infeasible'}
self.obj = None
self.solution = []
self.infeasible_list = []
def add_ancestor_cons(self, ancestor_cons: List[List[int or float]]):
"""
initialise
:param ancestor_cons: constraints from ancestors
"""
self.mat_cons += ancestor_cons
def solve(self):
"""
solve problem
"""
# add new constraint
if self.new_cons:
self.mat_cons.append(self.new_cons)
solver = SolverLP(problem=self.problem)
solver.solve()
status, self.obj, self.solution = solver.status, solver.obj, solver.solution
if status in {'optimal', 'feasible'}:
self._check_solution()
self.status = 'feasible' if not self.infeasible_list else 'relax'
else:
self.status = 'infeasible'
def _check_solution(self):
"""
check if solution valid
"""
if self.problem_type == 'IP':
self._check_integer()
else:
pass
def _check_integer(self):
"""
check if all solutions are integers
"""
for i in range(len(self.solution)):
x = self.solution[i]
if round(x, ACCURACY) != round(x):
self.infeasible_list.append((i, x))
algorithm.py
分支定界算法的算法模块,要点:
- 每得到一个可行解,更新最优可行解(incumbent)
- 每完成一次分支(所有子节点求解完毕),更新全局的界(bound)
import datetime
from typing import List, Dict
import math
import rich
from config import PROBLEM_TYPES, INSTANCE, ACCURACY
from algorithm.problem import Problem
from algorithm.node import Node
class BranchAndBound(object):
"""
branch and bound algorithm
"""
def __init__(self, time_limit: int or float = 3600, gap_upper: float = 0) -> None:
"""
initialise
:param time_limit: time limit of solving
:param gap_upper: upper bound of gap of solving
"""
self.problem: Problem = INSTANCE
self.problem_type = self.problem.problem_type
self.num_var, self.mat_cons, self.obj_coef = self.problem.num_var, self.problem.mat_cons, self.problem.obj_coef
# check problem type
if self.problem_type not in PROBLEM_TYPES:
raise Exception(f"Problem type {self.problem_type} invalid!")
# optimising direction
self.opt_dir = 'min' if self.obj_coef[-1] <= 0 else 'max'
# solving params
self.time_limit = time_limit
self.gap_upper = gap_upper
self.dt_start, self.dt_end = datetime.datetime.now(), None
self.final_time_cost = None
self.final_gap = None
# nodes
self.idx_acc = 0
self.nodes: Dict[int, Node] = {} # all nodes, key: ID
self.leaf_nodes: List[int] = [] # node ID
# solution status
self.status = 'empty' # {'empty', 'optimal', 'feasible', 'infeasible', 'fail'}
self.solution = None
self.incumbent, self.incumbent_node = None, None # update once feasible solution found
self.bound, self.bound_node = None, None # update once leaf nodes updated
@property
def time_cost(self) -> float:
"""
get time cost
"""
dt_end = datetime.datetime.now()
tm_delta: datetime.timedelta = dt_end - self.dt_start
return round(tm_delta.seconds + tm_delta.microseconds / 1e6, 6)
@property
def reach_time_limit(self) -> bool:
"""
check if reach time limit
"""
return self.time_cost >= self.time_limit
@property
def gap(self) -> bool:
"""
calculate current gap
"""
# case 1: searched all nodes
if self.bound_node not in self.leaf_nodes:
return 0
# case 2: catched both incumbent and bound
elif self.bound is not None and self.incumbent is not None:
return abs(self.bound - self.incumbent) / abs(self.incumbent)
else:
return None
@property
def reach_accuracy(self) -> bool:
"""
check if gap reach accuracy
"""
return True if self.gap is not None and self.gap <= self.gap_upper else False
def run(self):
"""
algorithm main process
"""
self.dt_start = datetime.datetime.now()
# root node and solve
node_index = self.idx_acc
self.idx_acc += 1
node = Node(id=node_index, father=None, new_cons=[])
node.depth = 0
self.nodes[node_index] = node
rich.print(f"Solving node {node_index}")
node.solve()
# special case 1: root node feasible
if node.status == 'feasible':
self.solution = node.solution
self.status = 'optimal'
return
# special case 2: root node infeasible
elif node.status == 'infeasible':
self.status = 'infeasible'
return
# update leaf nodes and bound
self.leaf_nodes.append(node.id)
self._update_bound()
rich.print()
# main circulation
node_index = self._select_node()
while node_index is not None: # attention: don't use "while node_index" because the index can be 0
# branch and get new leaf nodes
is_terminated = self._branch(node_index=node_index)
# check termination
if is_terminated:
self.final_time_cost = self.time_cost
self.final_gap = self.gap
rich.print(f"final time cost: {self.final_time_cost}")
rich.print(f"final gap: {self.final_gap}")
return
# select node to branch
node_index = self._select_node()
rich.print()
# all nodes searched
self.final_gap = self.gap
if self.incumbent_node is not None:
self.solution = self.nodes[self.incumbent_node].solution
self.status = 'optimal' if self.final_gap == 0 else 'feasible'
else:
self.status = 'ineasible'
self.final_time_cost = self.time_cost
rich.print(f"final time cost: {round(self.final_time_cost, 3)} s")
rich.print(f"final gap: {self.final_gap}")
rich.print(f"total nodes: {len(self.nodes)}")
rich.print(f"maximal node depth: {max(self.nodes[i].depth for i in self.nodes)}")
rich.print()
def _select_node(self) -> int or None: # TODO: node selection strategy: bound node
"""
node selection
:return: selected node index
"""
# have updated bound before
return self.bound_node if self.bound_node in self.leaf_nodes else None
def _branch(self, node_index: int) -> bool:
"""
branching
:param node_index: father node index
:return: if algorithm terminates
"""
node = self.nodes[node_index]
list_new_cons = self._get_new_constraints(node_index=node_index)
for cons in list_new_cons:
# new node
node_index_new = self.idx_acc
self.idx_acc += 1
node_new = Node(id=node_index_new, father=node.id, new_cons=cons)
node_new.depth = node.depth + 1
self.nodes[node_index_new] = node_new
# inherit constraints from ancestors
ancestor_cons = []
node_new_ = node_new
while node_new_.father:
ancestor_cons.append(self.nodes[node_new_.father].new_cons)
node_new_ = self.nodes[node_new_.father]
node_new.add_ancestor_cons(ancestor_cons=ancestor_cons)
# solve node and check incumbent
rich.print(f"Solving node {node_index_new}")
rich.print(f"new constraint coefficients: {cons}")
node_new.solve()
rich.print(f"node status: {node_new.status}")
if node_new.status == 'feasible':
incumbent_updated = self._update_incumbent(feasible_node=node_index_new)
# update incumbent and check accuracy
if incumbent_updated:
if self.reach_accuracy:
rich.print(
f"Gap {self.gap} reach accuracy {self.gap_upper}, bound {round(self.bound, ACCURACY)}")
self.solution = self.nodes[self.incumbent_node].solution
self.status = 'optimal' if self.gap == 0 else 'feasible'
return True
# check time limit
if self.reach_time_limit:
rich.print(f"Time limit reached!")
if self.incumbent_node is not None:
self.solution = self.nodes[self.incumbent_node].solution
self.status = 'optimal' if self.gap == 0 else 'feasible'
else:
rich.print(f"Didn't find a feasible solution within time limit!")
self.status = 'fail'
return True
# add new leaf node
if node_new.status == 'relax':
self.leaf_nodes.append(node_index_new)
rich.print()
# remove old leaf node
self.leaf_nodes.remove(node_index)
# update bound and check accuracy
bound_updated = self._update_bound()
if bound_updated:
if self.reach_accuracy:
rich.print(
f"Gap {self.gap} reach accuracy {self.gap_upper}, incumbent {round(self.incumbent, ACCURACY)}")
rich.print()
self.solution = self.nodes[self.incumbent_node].solution
self.status = 'optimal' if self.gap == 0 else 'feasible'
return True
return False
def _get_new_constraints(self, node_index: int) -> List[List[float or int]]: # TODO: branching strategy: index-based
"""
get new constraints for node branching
:param node_index: branching node
:return: new constraints list
"""
node = self.nodes[node_index]
if self.problem_type == 'IP':
idx_infeasible, infeasible_solution = node.infeasible_list[0]
new_cons_1 = [1 if i == idx_infeasible else 0 for i in range(self.num_var)] + [
-1, math.floor(infeasible_solution)]
new_cons_2 = [1 if i == idx_infeasible else 0 for i in range(self.num_var)] + [
1, math.ceil(infeasible_solution)]
return [new_cons_1, new_cons_2]
else:
pass
def _update_incumbent(self, feasible_node: int) -> bool:
"""
update global feasible solution
:param feasible_node: index of new feasible node
:return: if incumbent updated
"""
node = self.nodes[feasible_node]
# get a feasible solution firstly
if self.incumbent is None:
self.incumbent, self.incumbent_node = node.obj, feasible_node
rich.print(f"Get new incumbent {round(self.incumbent, ACCURACY)} from node {self.incumbent_node}")
return True
# get a better feasible solution
elif (self.opt_dir == 'min' and node.obj < self.incumbent) or (
self.opt_dir == 'max' and node.obj > self.incumbent):
self.incumbent, self.incumbent_node = node.obj, feasible_node
rich.print(f"Get new incumbent {round(self.incumbent, ACCURACY)} from node {self.incumbent_node}")
return True
return False
def _update_bound(self) -> bool:
"""
update global bound
:return: if bound updated
"""
bound, bound_node = None, None
for node_idx in self.leaf_nodes:
node = self.nodes[node_idx]
if node.status == 'relax':
if bound is None:
bound, bound_node = node.obj, node_idx
elif (self.opt_dir == 'min' and node.obj < bound) or (
self.opt_dir == 'max' and node.obj > bound):
bound, bound_node = node.obj, node_idx
if bound is not None:
self.bound, self.bound_node = bound, bound_node
rich.print(f"Get new bound {round(self.bound, ACCURACY)} from node {self.bound_node}")
return True
return False
cases.py
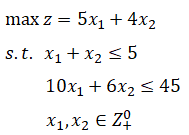
基于前面定义的问题格式,提供两个整数规划算例:
一个简单算例:
一个 NP 算例:
分支定界算法的 NP 算例
from algorithm.problem import Problem
CASES = {}
"""
IP: simple
"""
num_var = 2
mat_cons = [
[1, 1, -1, 5],
[10, 6, -1, 45]
]
var_range = [
[1, 0, 1, 0],
[0, 1, 1, 0]
]
mat_cons += var_range
obj_coef = [5, 4, 1]
CASES['IP-simple'] = Problem(problem_type='IP', num_var=num_var, mat_cons=mat_cons, obj_coef=obj_coef)
"""
IP: NP-hard
"""
num_var = 16
mat_cons = [[2 for _ in range(num_var - 1)] + [1] + [0] + [15]]
var_range = [
[1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0] + [1] + [0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1] + [1] + [0],
[1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0] + [-1] + [1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1] + [-1] + [1],
]
mat_cons += var_range
obj_coef = [0 for _ in range(num_var - 1)] + [1] + [-1]
CASES['IP-NP-hard'] = Problem(problem_type='IP', num_var=num_var, mat_cons=mat_cons, obj_coef=obj_coef)
config.py
根目录下的配置文件,含算例选取、算法精确度等全局变量:
from algorithm.cases import CASES
PROBLEM_TYPES = {'IP'} # TODO: only support IP model so far
# INSTANCE = CASES['IP-simple']
INSTANCE = CASES['IP-NP-hard']
ACCURACY = 3 # 0.001
main.py
主程序:
import rich
from config import ACCURACY
from algorithm.algorithm import BranchAndBound
rich.print()
branch_and_bound = BranchAndBound(time_limit=300, gap_upper=0)
branch_and_bound.run()
status = branch_and_bound.status
solution = [round(x, ACCURACY) for x in branch_and_bound.solution]
optimal_obj = branch_and_bound.incumbent
rich.print(f"algorithm final status: {status}")
rich.print(f"algorithm final solution: {solution}")
rich.print(f"algorithm final objective value: {optimal_obj}")
rich.print()
算例运行效果
简单算例

NP 算例

展望
本文原本致力于写一个朴素的适用于各类问题的分支定界算法框架,其实也就是玩玩,但由于精力有限,只完成了求解整数规划问题的部分,并且算法内部的具体策略较为简单,因此对更多的功能实现做出一点展望,期望完善、指正和交流:
- 更丰富的分支策略:本文代码选用所有不可行约束中序号最小的进行分支
- 更丰富的节点选择策略:本文代码选择了叶子节点中的界(bound)节点进行下一深度的搜索
- 更夫妇的问题类型:如使用分支定界算法求解 TSP、CBS(conflict-based search)、branch-and-price 等问题,当然,当前框架不一定可行或合理,期待更好的实现方法
- 引入有效割:提升算法性能