论文信息
题目:
DP-SLAM:A visual SLAM with moving probability towards dynamic environments
DP-SLAM:面向动态环境的移动概率视觉SLAM
论文地址:
发表期刊:
标签
语义分割+几何约束、动态概率传播、
摘要
文中提出了一种基于稀疏特征的视觉SLAM (DP-SLAM)算法,该算法基于动态概率传播模型进行关键点检测。概率表示一个关键点位于移动对象上的可能性。该方法结合几何约束和语义分割的结果,在贝叶斯概率能力估计框架中跟踪动态关键点。将该方法集成到ORB SLAM2系统的前端,作为预处理阶段,过滤出与移动物体相关的关键点。此外,对被检测到的动态物体遮挡的帧背景进行修复,有利于虚拟现实、增强现实等应用。
内容简介
因此,这些SLAM系统在动态环境中的性能严重依赖于CNN的分割精度。然而,在一般环境下仅使用CNN工具获得稳定和精确的语义分割结果仍然具有挑战性。针对该问题,结合几何模型和深度学习算法,提出一种动态关键点检测的移动概率传播模型。本文将运动关键点检测定义为运动去除。本文方法的主要贡献总结如下:
1)提出一种新的运动去除方法,实时传播每个关键点的运动概率。运动概率传播方法克服了几何约束和语义信息的偏差,提高了视觉SLAM系统的准确性和鲁棒性。
2)利用静态信息修复被遮挡的背景,得到无动态内容的合成RGB帧和对应的深度帧,有利于虚拟现实应用。
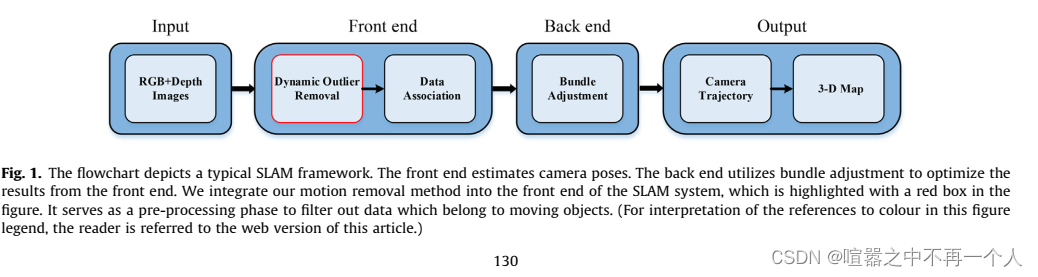
我们的运动去除方法的思想很简单。1显示了我们方法的流程图。该方法作为预处理阶段,过滤与移动对象相关的数据,从而减少SLAM前端中的错误数据关联。如图2所示,该方法结合了几何模型和语义分割来去除运动。将几何模型和语义分割的结果转化为观测概率。将前一帧中关键点的移动概率作为先验概率;基于贝叶斯定理,根据观测概率和先验概率更新关键点的移动概率。然后剔除高移动概率(大于0.5)的关键点,使SLAM算法在后期的位姿跟踪和建图过程中无法保留它们;此外,为了提高动态环境下的建图性能,本文通过融合多帧识别出的静态点来修复被遮挡的背景,这有助于SLAM系统后端的闭环和建图算法。
针对动态环境下的RGB-D SLAM问题,提出一种基于ORB-SLAM2的运动去除方法。结合几何模型和语义分割,提出一种运动概率传播模型来缓解动静态关键点的误分类问题,并将其集成到视觉SLAM系统中,提高其对动态环境的适应能力。针对视觉几何约束和语义引导建模中存在的不确定性,提出了一种概率框架对它们进行建模和融合。通过引入更多的视觉约束或更强大的cnn进行语义分割,仍然可以提高性能。本文工作是为基于稀疏特征的视觉SLAM系统设计的。未来,基于所提出的框架,旨在开发一种运动去除方法,以帮助密集点云地图方法在动态环境中表现良好,因为密集点云地图对移动机器人导航更有意义。
来自ChatGPT4的论文解读
论文解读:
题目:DP-SLAM: A visual SLAM with moving probability towards dynamic environments
方法:本文提出了一种名为DP-SLAM的稀疏特征点基础视觉SLAM方法,采用动态关键点检测的移动概率传播模型。该模型结合几何约束和语义分割的结果,在贝叶斯概率估计框架下跟踪动态关键点。将该方法集成到ORB SLAM2系统的前端,作为过滤与移动对象相关的关键点的预处理阶段。此外,通过合成填充被动态对象遮挡的帧背景,为虚拟现实和增强现实等应用提供便利。
创新点:
- 提出了一种实时传播每个关键点移动概率的新颖动态移除方法,结合几何约束和深度学习方法,提高视觉SLAM系统的准确性和鲁棒性。
- 利用静态信息填充被遮挡的背景,生成无动态内容的合成RGB帧及其相应的合成深度帧,有益于虚拟现实应用。
- 将所提出的动态移除方法集成到ORB-SLAM2系统中,并在TUM RGB-D基准数据集上进行评估和方法比较。
优点:
- 能够有效地在动态环境下进行SLAM,提高了ORB-SLAM2系统的鲁棒性和精度。
- 结合几何模型和语义分割,缓解动态关键点和静态关键点之间的误分类问题。
- 通过合成填充遮挡背景,有助于SLAM系统的闭环检测和后端地图构建。
缺点:
- 对于更精确的语义分割结果,还需要引入更多视觉约束或更强大的CNN。
- 当前的工作仅适用于基于稀疏特征点的视觉SLAM系统。
可以尝试的改进和创新点:
- 尝试引入更多视觉约束或改进CNN,以提高语义分割的准确性。
- 将该方法扩展到基于密集点云地图的SLAM系统,因为密集点云地图对移动机器人导航更具有意义。
- 结合IMU数据,以进一步提高动态环境中特征点处理的准确性。
关于基于视觉的动态SLAM论文,您可以根据上述解读的内容,结合IMU数据进一步提高动态概率传播模型的准确性。在实现细节方面,我会在实现细节方面,我会提供专业建议。以下是您可以尝试的改进和创新点:
-
在动态概率传播模型中结合IMU数据:IMU数据可以提供关于运动传感器(如加速度计和陀螺仪)的信息,有助于更准确地估计相邻帧之间的相对位姿变化。将IMU数据与视觉特征信息相结合,可以提高动态关键点检测的精确性,从而提高SLAM算法的鲁棒性。
-
开发一个端到端的深度学习模型:您可以探索利用深度学习模型,如CNN和RNN,来自动检测和跟踪动态关键点。这样的模型可以同时考虑几何约束、语义信息和IMU数据,从而实现更准确的动态对象检测。
-
在视觉SLAM系统中实现密集地图重建:您可以尝试将所提出的方法扩展到基于密集点云地图的SLAM系统,这将使您的SLAM算法更具实用性,因为密集点云地图对移动机器人导航更具有意义。
-
引入多模态数据:为了提高SLAM系统在复杂动态环境下的性能,可以尝试引入其他模态数据,如激光雷达或声纳数据。这将有助于提高系统的鲁棒性和准确性,特别是在视觉数据质量较差的情况下。
在撰写论文时,请确保详细介绍您的方法和实验设置,以便其他研究人员可以重现您的工作。同时,分析和讨论实验结果,强调您的方法在动态环境下SLAM性能上的改进,以及与现有技术的比较。最后,总结您的工作,并讨论潜在的未来研究方向。
阅读总结
文章针对的问题:
1、动态场景下的问题:
动态场景下会导致定位失败、建图不准
2、深度学习分割的问题:
深度学习的分割不准确、分割不到位、过分割问题
3、几何方法的问题:
几何方法在动态场景多的地方会导致失效
文章的解决办法
1、采用语义+几何分割的方法来解决欠分割的问题
2、利用动态概率传播来解决过分割的问题
3、没了