文章目录
- 像素坐标系
- 图像坐标系
- 小孔成像原理
- 相机坐标系
- 畸变参数
像素坐标系
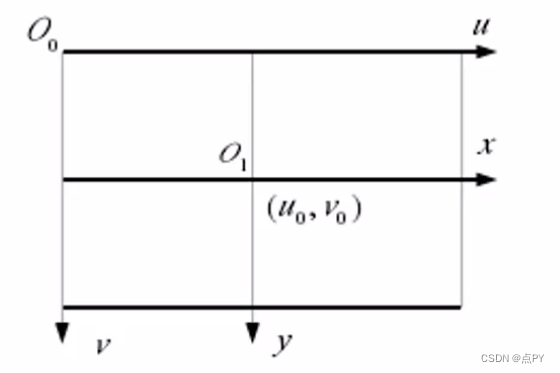
- 像素坐标系uov是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。
- 原点o位于图像的左上角,u轴、v轴分别于像面的两边平行。
- 像素坐标系中坐标轴的单位是像素(整数)。
图像坐标系
- 像素坐标系UOV不利于坐标变换,因此需要建立图像坐标系XOY
- 其坐标轴的单位通常位毫米(mm),原点是相机光轴与相面的交点(成为主点),即图像的中心点
- X轴、Y轴分别与U轴、V轴平行。故两个坐标系实际是平移关系,即可以通过平移就可以得到
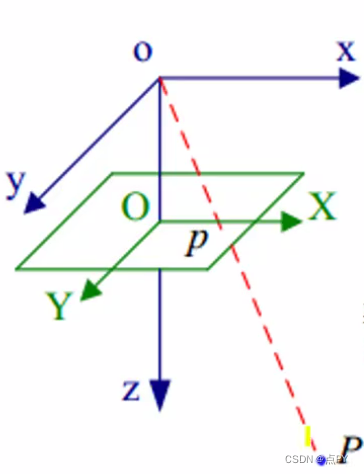
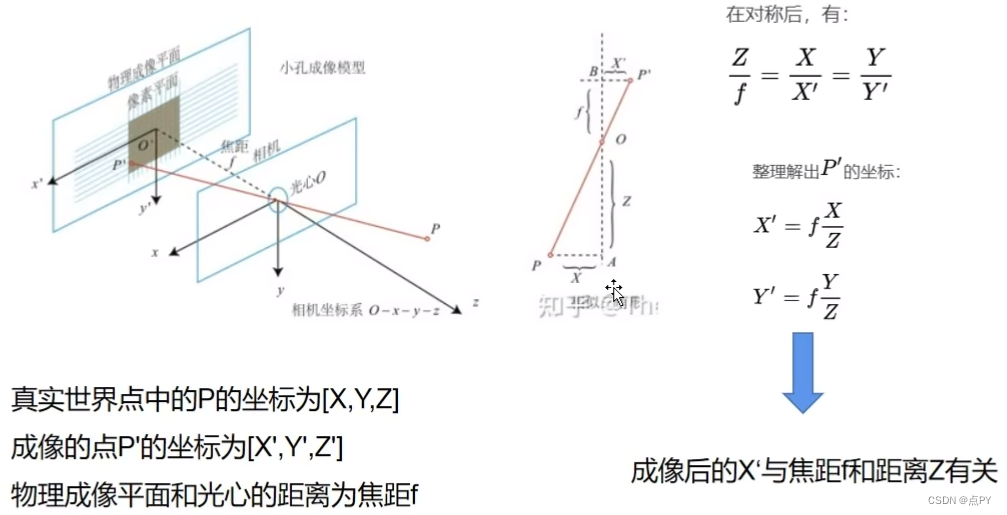
小孔成像原理
空间任意一点P与其图像点p之间的关系,P与相机光心o的连线位oP,oP与像面的交点p即为空间点P在图像平面上的投影。
该过程为透视投影,如下矩阵表示:
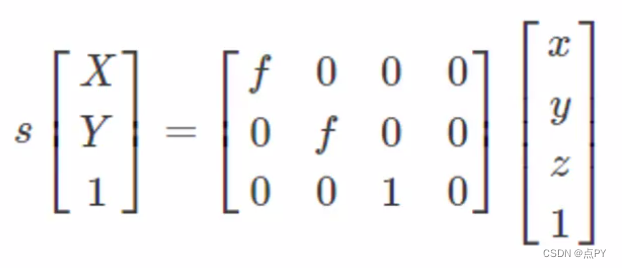
其中,s为比例因子(s不为0),f为有效焦距(光心到图像平面的距离),(x,y,z,1)^T 是空间点P在相机坐标系oxyz中的齐次坐标,(X,Y,1)^T 是像点p在图像坐标系OXY中的齐次坐标。
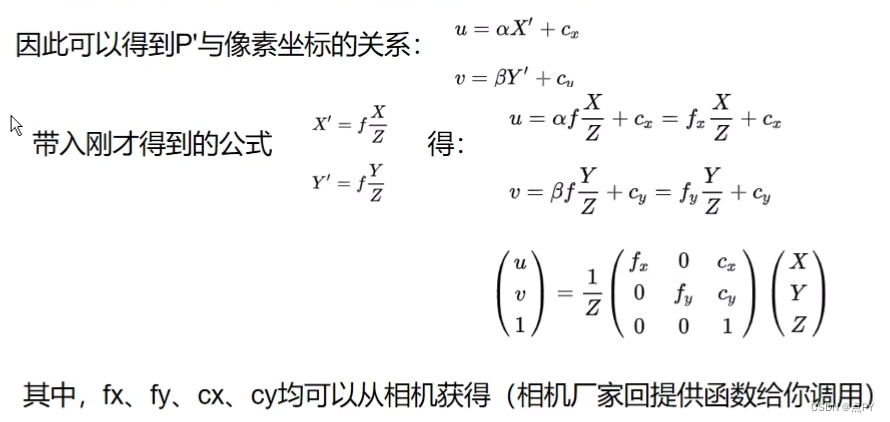
相机坐标系
像素坐标系通常定义方式是:原点位于图像的左上角,U轴向右与x轴平行,v轴向下与y轴平行。
设p‘在像素坐标系上的坐标是[u,v]^T,我们设像素坐标在u轴上缩放a倍,在v轴上缩放了β倍。同时,原点平移了[Cx, Cy]^T。
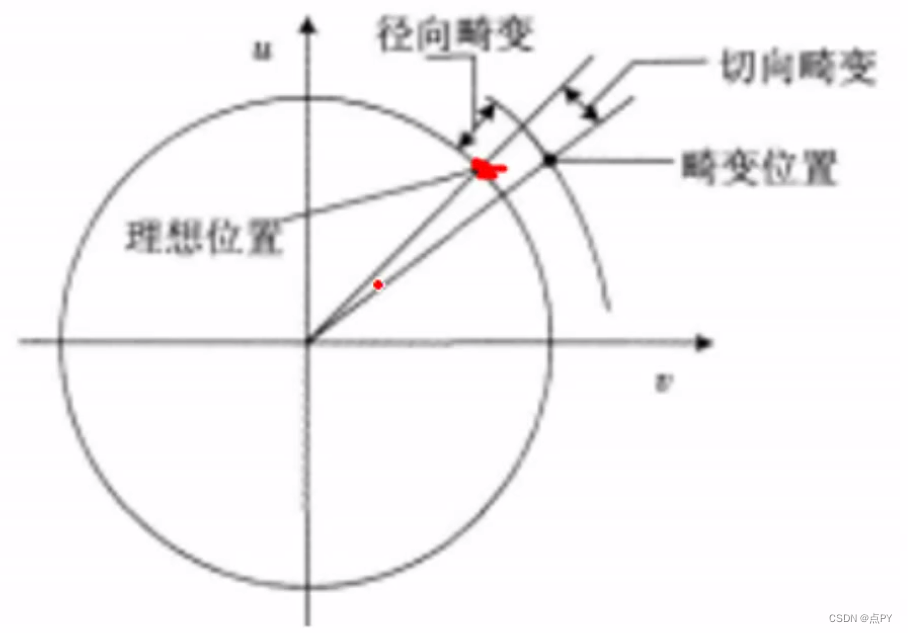
畸变参数
- 在几何光学和阴极射线管(CRT)显示中,畸变(distortion)是对直线投影(rectilinear projection)的一种偏移。
- 简单来说直线投影是场景内的一条直线投影到图片上也保持为一条直线
- 那畸变简单来说就是一条直线投影到图片上不能保持为一条直线了,这是一种光学畸变(optical aberration)
- 畸变一般可以分为两大类,包括径向畸变和切向畸变。主要的一般径向畸变有时也会有轻微的切向畸变。
PS:径向畸变来自于透镜形状。切向畸变来自于整个摄像机的组装过程。

![[附源码]SSM计算机毕业设计医院药房管理系统JAVA](https://img-blog.csdnimg.cn/fda238749fbd4ec6a8e3babd530a574a.png)