上一节:https://blog.csdn.net/weixin_39107270/article/details/130408407
概念
- You only look once
把检测问题转化成回归问题,一个CNN就搞定了。
2. 核心思想
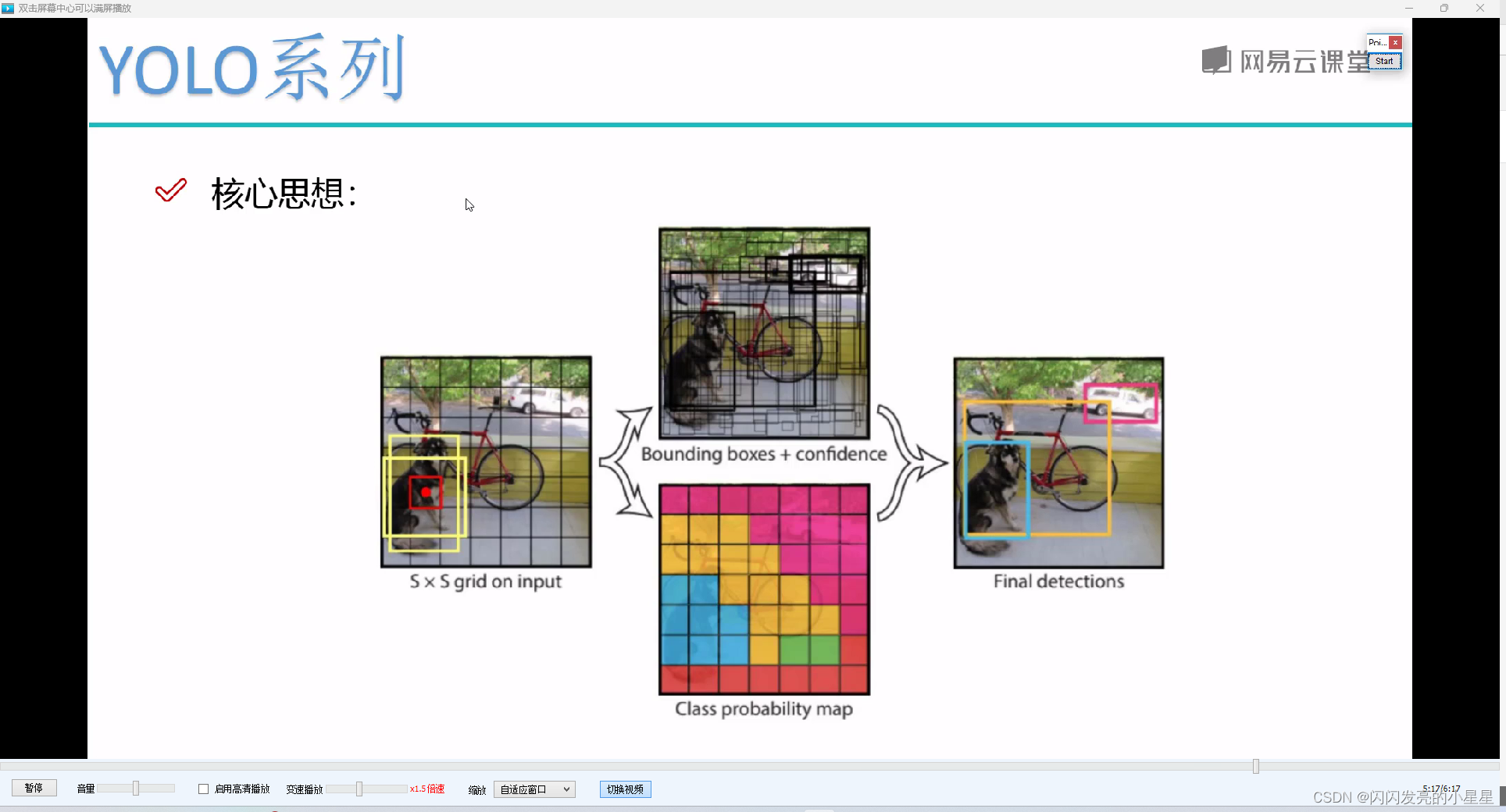
每个点处有2种候选框,如果候选框内有目标,对候选框进行微调,大于某阈值的候选框挑出来,计算IOU,最终回归预测得到 x,y,w,h和置信度阈值。
3. 网络架构
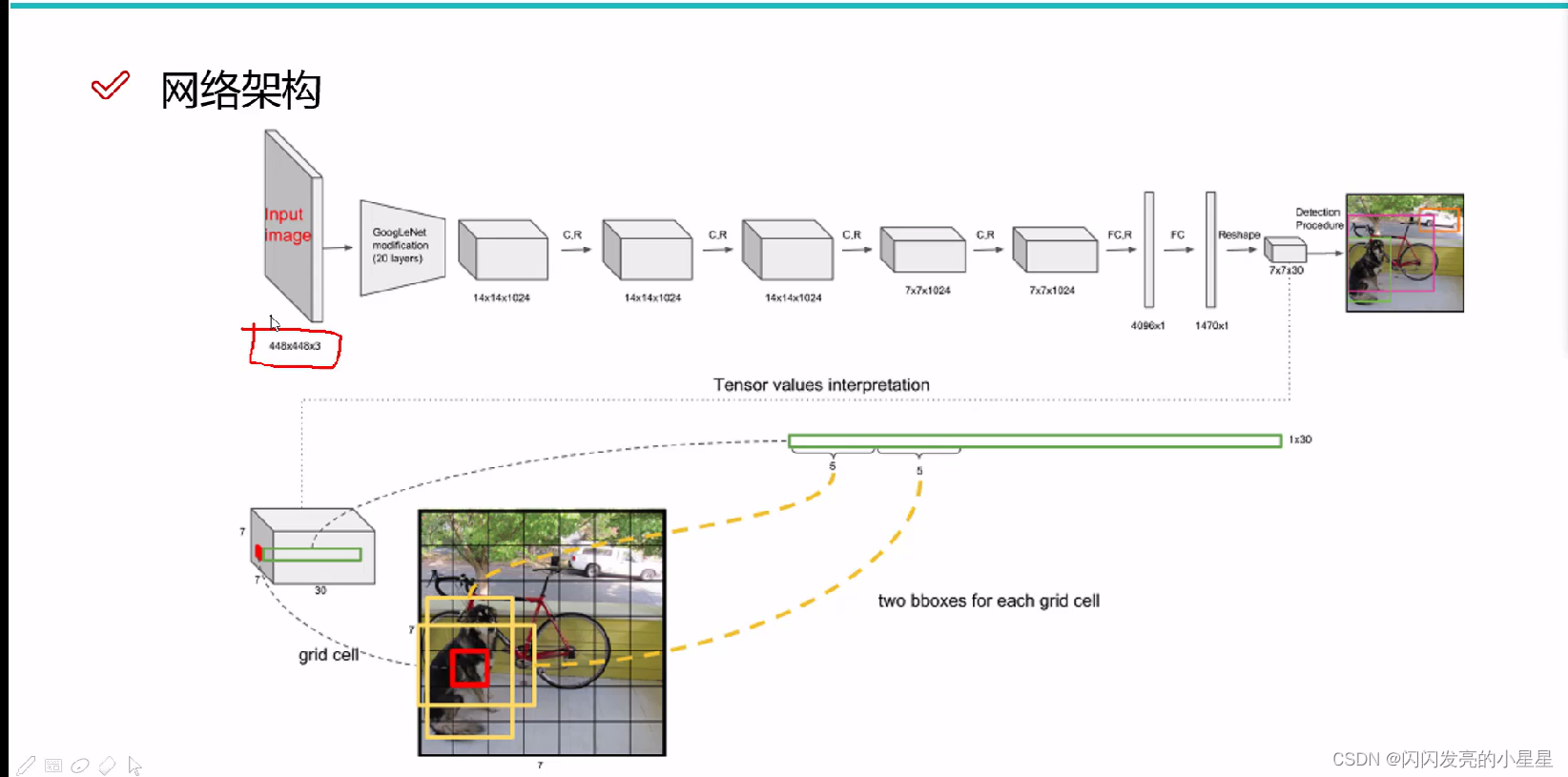
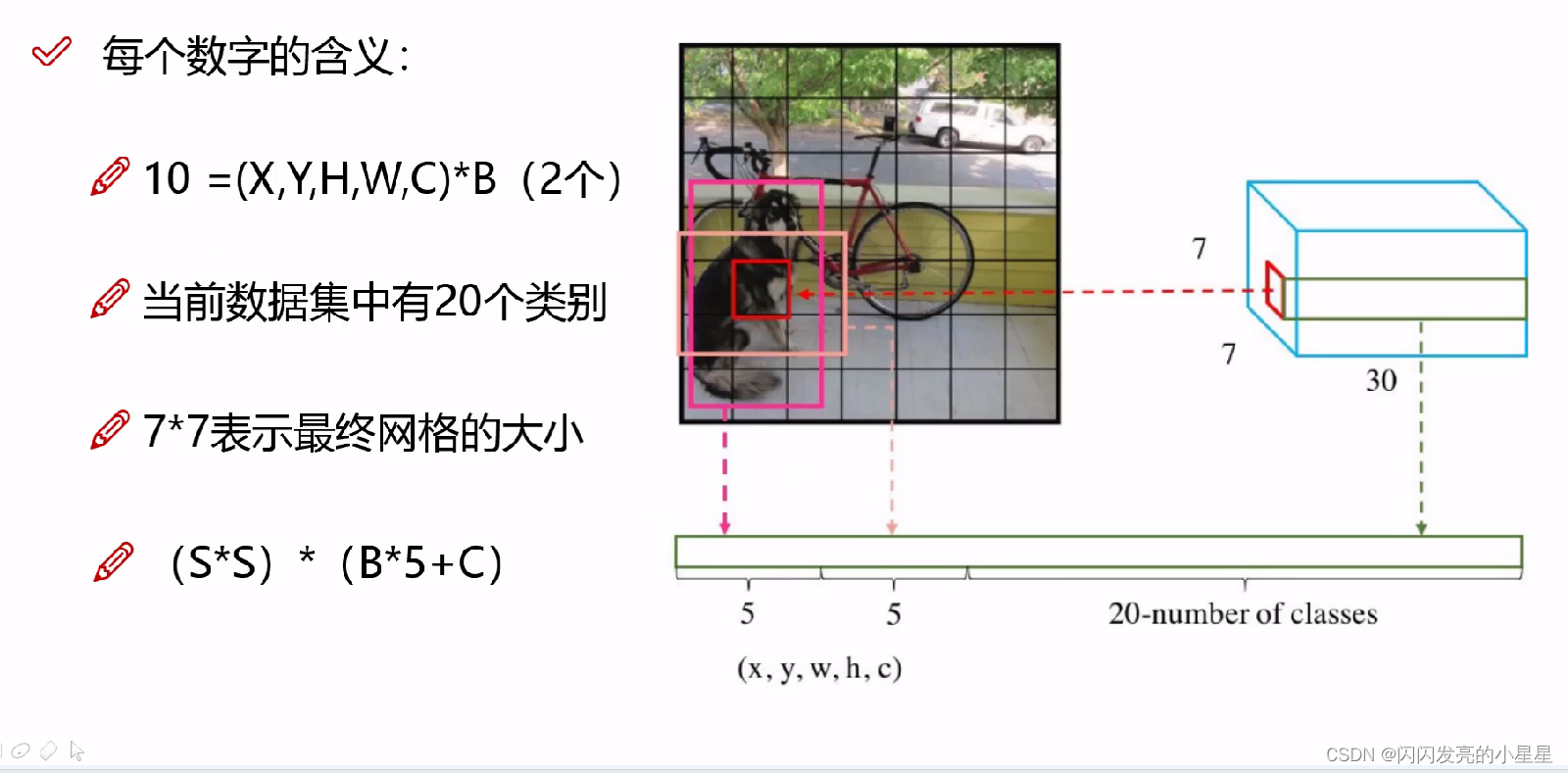
最终结果reshape为7730
7*7:最终网格的大小 (最终缩放到这么大吗)
30: 两种锚框的位置 x,y,w,h,c *2 +20种类别的概率,其中x ,y ,w,h 为相对位置???
4. 位置损失计算

损失函数包含 位置误差、置信度误差(前景和背景)、分类误差
损失函数中,同时涉及前景和背景的置信度误差,由于背景多,所以需要加一个纳米他权重。
5. NMS(非极大值抑制)
按置信度进行排序,选择置信度值最大的。
YOLO v1存在的问题
- 重合在一起的东西难检测。
- 小物体检测不到

上一节:https://blog.csdn.net/weixin_39107270/article/details/130408407



![[链表OJ题 2] 链表的中间结点 -- 快慢指针找链表的中间节点](https://img-blog.csdnimg.cn/img_convert/ecd710b48e49e65d291212b1a6f91b97.png)