软件简介:
ALOHA 即 A Low-cost Open-source Hardware System for Bimanual Teleoperation,是一个低成本的开源双手遥控操作硬件系统,即开源机械臂。其算法 Action Chunking with Transformers (ACT) 采用了神经网络模型 Transformers,因此具备模仿学习能力。只需要 15 分钟的演示,机械臂就可以学会一个动作 —— 直接从真实演示中执行端到端模仿学习,并通过自定义远程操作界面收集。
据介绍整个系统的成本不高,但它比价格高出 5-10 倍的同类系统更强大。
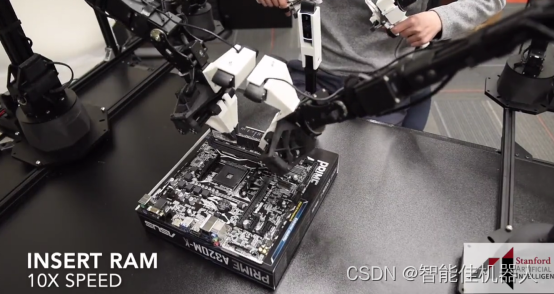
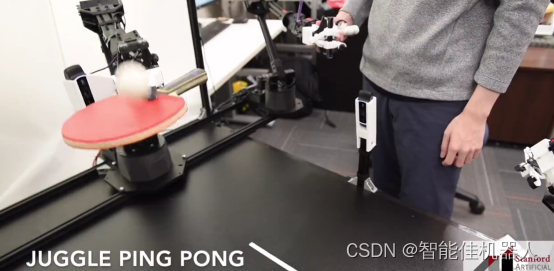
ALOHA 能够执行精确的任务,如 RAM 插入、动态任务(如乒乓球颠球),以及接触丰富的任务(如穿鞋)。并且运行可靠,在整整 8 个月的测试中没有电机故障。

硬件部分:
ViperX 300 机械手臂:

ViperX 300机械手臂属于一个新的手臂系列,其特点是配有DYNAMIXEL X系列智能伺服舵机。X系列执行器能够提供更高的扭矩,更有效的散热和更好的耐用性,与以往的伺服舵机有些微的差别。XM540-W270-R和XM430-W350-R舵机伺服系统提供4096个位置的高分辨率和用户可定义的PID参数。温度监控、位置反馈、电压水平、负载和合规设置也可由用户访问。ViperX 300提供5个自由度和360度全方位旋转。
ViperX 300经过完全组装和测试,由非常坚硬的20毫米x 40毫米挤压铝和耐热高强度ABS 3D印刷材料制成。臂架位于工业级回转轴承上,增加了稳定性和准确性。电子设备被一个透明的亚克力屏蔽罩覆盖,以使电子设备不受碎片以及手臂本身的冲击。
技术参数
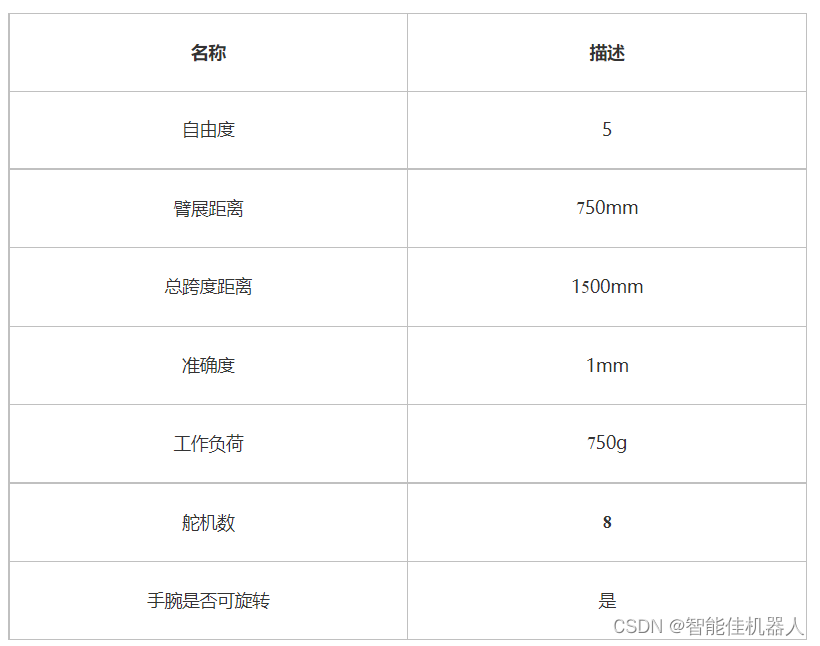
ViperX 300 可达范围
XM540舵机伺服系统支持高达360度的旋转,这也使得机械臂的运动范围极大。
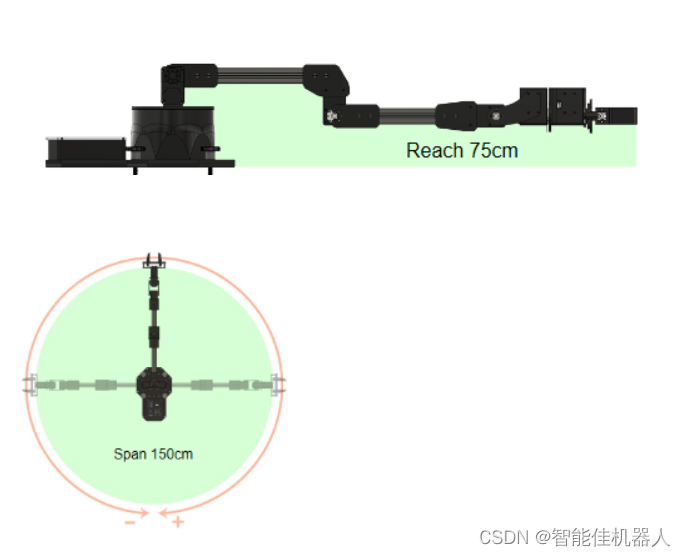 ViperX 300机械臂从底座中心到抓手的水平距离为75cm,总跨距为150cm。ViperX 300手臂的工作载荷为750g。工作载荷是指在正常工作环境下,该臂不应超过的重量,并通过手臂在约一半伸展范围内重复提升物体且不发生故障的能力进行测量。虽然ViperX 300可以举起超过750克,但我们不建议您操作超过750g的有效载荷。
ViperX 300机械臂从底座中心到抓手的水平距离为75cm,总跨距为150cm。ViperX 300手臂的工作载荷为750g。工作载荷是指在正常工作环境下,该臂不应超过的重量,并通过手臂在约一半伸展范围内重复提升物体且不发生故障的能力进行测量。虽然ViperX 300可以举起超过750克,但我们不建议您操作超过750g的有效载荷。
WidowX 250 robot arm 6 DOF机械手臂:

技术参数

WidowX 250 可达范围
XM540舵机伺服系统支持高达360度的旋转,这也使得机械臂的运动范围极大。
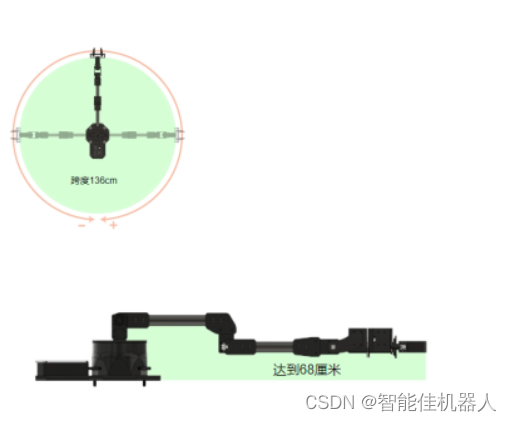
WidowX 250 6自由度机械臂水平伸展距离为68厘米(以底座中心为起点),总跨度为136厘米。其工作有效载荷是250g。工作有效载荷是指机械臂在正常工作环境下不应超过的重量,并且通过机械臂在伸展大约一半时,其重复抬起物体而不发生故障的能力来测量其有效载荷。虽然WidowX 250可以提起250g以上的物体,但是我们并不推荐您这样做。
备注:系统代码将陆续更新!!!