从前文:<<图像处理模块所代表的V4L2设备注册>> 中了解到。rkcif_mipi设备注册的过程就是以设备通知器为线索,从顶向下,依次找到下一级设备,添加到V4L2设备种,循环处理。将全部的子设备整理到 V4L2设备中,这样可以通过V4L2设备直接管理所包含的各个子设备。 其中各自探测到子设备后,会分别执行各自的bound()函数。
即 rkcif_mipi,mipi csi, mipi csi dphy 三个模块的 bound()函数!!!
最后执行 rkcif_mipi 的 complete()函数
所以 这里 我们就只分析:
1 rkcif_mipi 的 bound()函数
2 rkcif_mipi 的 complete()函数
有下面的分析可以知道,最终
即从这里:
rkcif_plat_probe
rkcif_plat_init
rkcif_register_platform_subdevs
cif_subdev_notifier
v4l2_async_notifier_register
__v4l2_async_notifier_register
static int __v4l2_async_notifier_register(struct v4l2_async_notifier *notifier)
{
struct device *dev =
notifier->v4l2_dev ? notifier->v4l2_dev->dev : NULL;
struct v4l2_async_subdev *asd;
int ret;
int i;
/*
动作4
工作
struct rkcif_device
struct device *dev;
struct device_node *of_node; //A associated device tree node 如 节点 rkcif_mipi_lvds
struct device_node *child; //Aa 第一个子节点 如 节点 port
struct device_node *child; // Aa-1 第一个子节点 如 节点 cif_mipi_in: endpoint
struct fwnode_handle fwnode;
struct v4l2_async_notifier notifier;
const struct v4l2_async_notifier_operations *ops ;(init)
+---struct list_head waiting;//等待通知链表
| struct v4l2_async_subdev **subdevs;//subdevs数组 保存 对应的远端关联节点的父节点信息
+-------|//subdevs[n] 将远端目标节点封装为 v4l2_async_subdev 结构 保存在该数组
|enum v4l2_async_match_type match_type = V4L2_ASYNC_MATCH_FWNODE 设备树fwnode匹配方式
|union match
struct fwnode_handle *fwnode;----------------------------->>>>>------------------------相连接的远程节点 mipi_csi2_output 的 父节点port的 fwnode
*/
for (i = 0; i < notifier->num_subdevs; i++) {
//获取 对应的远端关联节点的父节点信息
asd = notifier->subdevs[i];
//挂载 到等待队列
list_add_tail(&asd->list, ¬ifier->waiting);
}
/*
这里是一个循环探索的过程
第一轮:传入参数:
struct rkcif_device
struct v4l2_async_notifier notifier
rkcif_device 设备
1 遍历全局链表 subdev_list ,搜索到当前异步通知器是waiting链表中的子设备信息,即mipi csi设备。说明探索到已挂在的子设备
2 将mipi csi设备 添加到 V4L2 子设备链表中 !!
3 执行 rkcif_device设备的 notifier->ops->bound()函数
4 绑定 mipi csi设备 通知器
struct rkcif_device
struct v4l2_async_notifier notifier ----------+
|
struct csi2_dev |
struct v4l2_async_notifier notifier-----------+
struct v4l2_async_notifier *parent;-------+
第二轮:传入参数:
struct csi2_dev
struct v4l2_async_notifier notifier
mipi cis 设备
1 遍历全局链表 subdev_list ,搜索到当前异步通知器是waiting链表中的子设备信息,即 mipi csi dphy 设备。说明探索到已挂在的子设备
2 将 mipi csi dphy 设备 添加到 V4L2 子设备链表中 !!
3 执行 mipi cis 设备的 notifier->ops->bound()函数
4 绑定 mipi csi dphy 设备 通知器
struct rkcif_device
struct v4l2_async_notifier notifier ----------+
|
struct csi2_dev |
struct v4l2_async_notifier notifier-----------+
struct v4l2_async_notifier *parent;-------+
|
struct mipidphy_priv |
struct v4l2_async_notifier notifier-----------+
struct v4l2_async_notifier *parent;-------+
第三轮: 传入参数
struct mipidphy_priv
struct v4l2_async_notifier notifier
mipi csi dphy 设备
1 遍历全局链表 subdev_list ,搜索到当前异步通知器是waiting链表中的子设备信息,即 sensor 设备。说明探索到已挂在的子设备
2 将 sensor 设备 添加到 V4L2 子设备链表中 !!
3 执行 mipi csi dphy 设备的 notifier->ops->bound()函数
4 绑定 sensor 设备 通知器
struct rkcif_device
struct v4l2_async_notifier notifier ----------+
|
struct csi2_dev |
struct v4l2_async_notifier notifier-----------+
struct v4l2_async_notifier *parent;-------+
|
struct mipidphy_priv |
struct v4l2_async_notifier notifier-----------+
struct v4l2_async_notifier *parent;-------+
|
struct techpoint |
struct v4l2_async_notifier notifier-----------+
struct v4l2_async_notifier *parent;-------+
第四轮:传入参数:
struct techpoint
struct v4l2_async_notifier notifier
sensor 设备
由于sensort 已经是最后一级模块,他没有子设备。直接返回 !!!
*/
ret = v4l2_async_notifier_try_all_subdevs(notifier);
if (ret < 0)
goto err_unbind;
/* 参数1 当前设备异步通知器
* 条件不满足,暂时不进入分析,不满足原因如下
* 1. notifier->parent == NULL
* 2. notifier->v4l2_dev == NULL
所以其他三个subdev设备 独自初始化时 不满足该函数运行条件
只有 rkcif_mipi 能执行该函数
*/
ret = v4l2_async_notifier_try_complete(notifier);
if (ret < 0)
goto err_unbind;
/*
* 以上2个函数可以看出来,v4l2_dev为空时都不会执行
* 将这个notifer挂载到链表notifier_list上
*/
/* Keep also completed notifiers on the list */
list_add(¬ifier->list, ¬ifier_list);
mutex_unlock(&list_lock);
return 0;
err_unbind:
/*
* On failure, unbind all sub-devices registered through this notifier.
*/
v4l2_async_notifier_unbind_all_subdevs(notifier);
err_unlock:
mutex_unlock(&list_lock);
return ret;
}
这里会按照顺序 分别执行各自的bound()函数。
即 rkcif_mipi,mipi csi, mipi csi dphy 三个模块的 bound()函数!!!
首先 先看 rkcif_mipi 模块的 bound()函数
struct rkcif_device
struct v4l2_async_notifier notifier;
const struct v4l2_async_notifier_operations *ops ;(init)
.bound = subdev_notifier_bound,
// V4L4 异步通知操作集
static const struct v4l2_async_notifier_operations subdev_notifier_ops = {
.bound = subdev_notifier_bound,
.complete = subdev_notifier_complete,
};
//已经成功探测到其中一个子设备,只是把子设备 mipi csi的subdev放入cif_dev->sensors的数组中存储
/*
参数1 rkcif_device->v4l2_async_notifier
参数2 相关联的 mipi csi 的 v4l2_subdev
参数3 相关联的 mipi csi 的dts节点
*/
static int subdev_notifier_bound(struct v4l2_async_notifier *notifier,
struct v4l2_subdev *subdev,
struct v4l2_async_subdev *asd)
{
//当前 rkcif_device 设备信息
struct rkcif_device *cif_dev = container_of(notifier,
struct rkcif_device, notifier);
struct rkcif_async_subdev *s_asd = container_of(asd,
struct rkcif_async_subdev, asd);
if (cif_dev->num_sensors == ARRAY_SIZE(cif_dev->sensors)) {
v4l2_err(&cif_dev->v4l2_dev,
"%s: the num of subdev is beyond %d\n",
__func__, cif_dev->num_sensors);
return -EBUSY;
}
//将 相关联的 mipi csi 的 v4l2_subdev 添加到 rkcif_device设备的子sensor[]数组中
cif_dev->sensors[cif_dev->num_sensors].lanes = s_asd->lanes;
cif_dev->sensors[cif_dev->num_sensors].mbus = s_asd->mbus;
cif_dev->sensors[cif_dev->num_sensors].sd = subdev;
++cif_dev->num_sensors;
v4l2_err(subdev, "Async registered subdev\n");
return 0;
}
其实没干啥
只是把子设备 mipi csi的subdev放入cif_dev->sensors的数组中存储
再看看 rkcif_mipi 的complete()
static int subdev_notifier_complete(struct v4l2_async_notifier *notifier)
{
struct rkcif_device *dev;
struct rkcif_sensor_info *sensor;
struct v4l2_subdev *sd;
struct v4l2_device *v4l2_dev = NULL;
int ret, index;
// 通过 rkcif_mipi 通知器地址 得到 rkcif_device 地址
dev = container_of(notifier, struct rkcif_device, notifier);
// 获取 rkcif_mipi设备的 v4l2_device信息(v4l2设备)
v4l2_dev = &dev->v4l2_dev;
...
/*
参数:rkcif_mipi对应的 v4l2设备
*/
ret = rkcif_create_links(dev);
if (ret < 0)
goto unregister_lvds;
...
return ret;
}
/*
参数:rkcif_mipi 对应的 v4l2设备
*/
static int rkcif_create_links(struct rkcif_device *dev)
{
int ret;
u32 flags;
unsigned int s, pad, id, stream_num = 0;
bool mipi_lvds_linked = false;
//stream_num =4
if (dev->chip_id < CHIP_RV1126_CIF) {
if (dev->inf_id == RKCIF_MIPI_LVDS)
stream_num = RKCIF_MAX_STREAM_MIPI;
else
stream_num = RKCIF_SINGLE_STREAM;
} else {
stream_num = RKCIF_MAX_STREAM_MIPI;
}
/* sensor links(or mipi-phy) */
for (s = 0; s < dev->num_sensors; ++s) {
/*
已经知道 mipi csi的subdev 存储在 cif_dev->sensors[] 数组中
*/
struct rkcif_sensor_info *sensor = &dev->sensors[s];
struct rkcif_sensor_info linked_sensor;//用来代表 mipi csi 信息
struct media_entity *source_entity, *sink_entity;
linked_sensor.lanes = sensor->lanes;
//拿到 mipi csi 的 subdev(描述一个V4L2子设备 )
linked_sensor.sd = sensor->sd;
...
//遍历 mipi csi 模块抽象的 五个 端口抽象 四个source,1个link
for (pad = 0; pad < linked_sensor.sd->entity.num_pads; pad++) {
//目标是 四个source
if (linked_sensor.sd->entity.pads[pad].flags &
MEDIA_PAD_FL_SOURCE) {
if (pad == linked_sensor.sd->entity.num_pads) {
dev_err(dev->dev,
"failed to find src pad for %s\n",
linked_sensor.sd->name);
break;
}
...
for (id = 0; id < stream_num; id++) {
//拿到 mipi csi 模块抽象
source_entity = &linked_sensor.sd->entity;
// struct video_device 用于创建和管理V4L2设备的结构
/*
struct rkcif_device
struct rkcif_stream stream[RKCIF_MULTI_STREAMS_NUM]; //理解为四个流,每个流代表一个 video_device 设备
struct rkcif_vdev_node vnode;
struct video_device vdev;//每个流代表一个 video_device 设备
struct media_entity entity; //每个 video_device 设备 的模块抽象
*/
sink_entity = &dev->stream[id].vnode.vdev.entity;
if ((dev->chip_id != CHIP_RK1808_CIF &&
dev->chip_id != CHIP_RV1126_CIF &&
dev->chip_id != CHIP_RV1126_CIF_LITE &&
dev->chip_id != CHIP_RK3568_CIF) ||
(id == pad - 1 && !mipi_lvds_linked))
flags = MEDIA_LNK_FL_ENABLED;
else
flags = 0;
//
ret = media_create_pad_link(source_entity,
pad,
sink_entity,
0,
flags);
}
}
}
}
...
return 0;
}
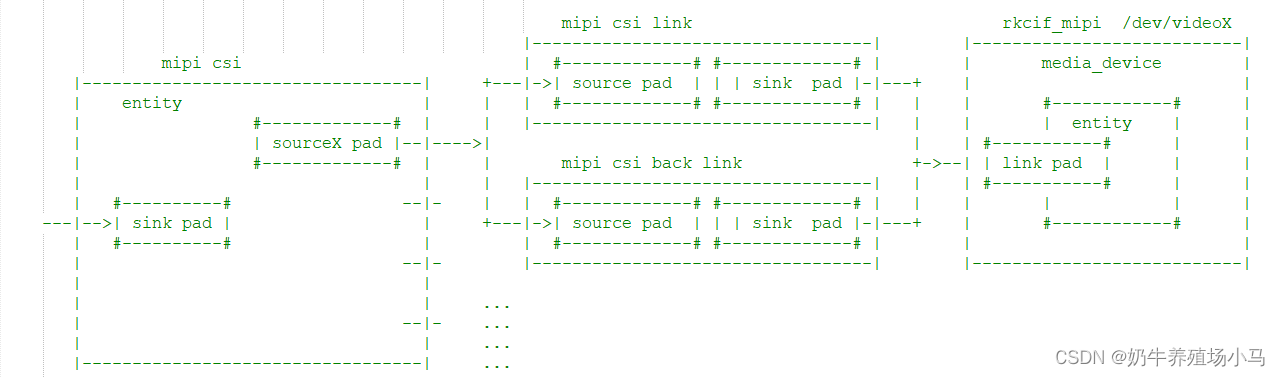
/*
工作
mipi csi link rkcif_mipi /dev/videoX
|----------------------------------| |---------------------------|
mipi csi | #-------------# #-------------# | | media_device |
|----------------------------------| +---|->| source pad | | | sink pad |-|---+ | |
| entity | | | #-------------# #-------------# | | | #------------# |
| #-------------# | | |----------------------------------| | | | entity | |
| | sourceX pad |--|---->| | | #-----------# | |
| #-------------# | | mipi csi link +->--| | link pad | | |
| | | |----------------------------------| | | #-----------# | |
| #----------# --|- | | #-------------# #-------------# | | | | | |
---|-->| sink pad | | +---|->| source pad | | | sink pad |-|---+ | #------------# |
| #----------# | | #-------------# #-------------# | | |
| --|- |----------------------------------| |---------------------------|
| |
| | ...
| --|- ...
| | ...
|----------------------------------| ...
此时
mipi csi 设备抽象 ---- mipi csi 抽象链接 ---- rkcif_mipi设备抽象
---- mipi csi 反向抽象链接 ----
关联 这两个link : link和backlink
*/
int media_create_pad_link(struct media_entity *source, u16 source_pad,
struct media_entity *sink, u16 sink_pad, u32 flags)
{
struct media_link *link;
struct media_link *backlink;
BUG_ON(source == NULL || sink == NULL);
BUG_ON(source_pad >= source->num_pads);
BUG_ON(sink_pad >= sink->num_pads);
/*
参数 子设备 mipi csi 的entity中的 links
创建子设备的 entity 的连接抽象(media_link)
struct media_entity { struct media_link {
struct list_head links; -----------创建绑定---------->struct list_head list;
并返回 media_link
*/
link = media_add_link(&source->links);
if (link == NULL)
return -ENOMEM;
//初始化 子设备的entity中的 连接抽象(media_link)
/*
链接管道 子设备 mipi csi ----- 正向link ----- rkcif_mipi( dev/deviceX)
rkcif_mipi /dev/videoX
|---------------------------|
| media_device |
mipi csi | |
|----------------------------------| mipi csi link | #------------# |
| entity | |----------------------------------| | | entity | |
| #-------------# | | #-------------# #-------------# | | #-----------# | |
| | sourceX pad |--|-----|->| source pad | | | sink pad |-|------->| | link pad | | |
| #-------------# | | #-------------# #-------------# | | #-----------# | |
| | |----------------------------------| | | | |
| #----------# --|- | #------------# |
---|-->| sink pad | | | |
| #----------# | |---------------------------|
| --|-
| |
| |
| --|-
| |
|----------------------------------|
*/
link->source = &source->pads[source_pad];
link->sink = &sink->pads[sink_pad];
link->flags = flags & ~MEDIA_LNK_FL_INTERFACE_LINK;
/* Initialize graph object embedded at the new link
绑定 子设备 mipi csi ----- link ----- 多媒体设备
struct csi2_dev
struct v4l2_subdev sd; 绑定 entity---link
struct media_entity entity; | struct media_link
struct list_head links; ---------> struct list_head list;
struct media_gobj graph_obj;
struct media_device *mdev------+
struct list_head list; -----|--->-+
| |
struct media_gobj graph_obj; 绑定 多媒体设备--link | |
struct media_device *mdev; -----------------------------------+ | 挂载到多媒体设备中的 links 链表
struct list_head links; ------------------<----------------------+
*/
media_gobj_create(source->graph_obj.mdev, MEDIA_GRAPH_LINK,
&link->graph_obj);
//关于反向链接
/*
struct csi2_dev
struct v4l2_subdev sd; 反向link
struct media_entity entity; struct media_link {
struct list_head links;-----创建绑定-----> struct list_head list;
*/
backlink = media_add_link(&sink->links);
if (backlink == NULL) {
__media_entity_remove_link(source, link);
return -ENOMEM;
}
/*
链接管道 子设备 mipi csi ----- 反向link ----- mipi csi phy
rkcif_mipi /dev/videoX
|---------------------------|
| media_device |
mipi csi | |
|----------------------------------| mipi csi back link | #------------# |
| entity | |----------------------------------| | | entity | |
| #-------------# | | #-------------# #-------------# | | #-----------# | |
| | sourceX pad |--|-----|->| source pad | | | sink pad |-|------->| | link pad | | |
| #-------------# | | #-------------# #-------------# | | #-----------# | |
| | |----------------------------------| | | | |
| #----------# --|- | #------------# |
---|-->| sink pad | | | |
| #----------# | |---------------------------|
| --|-
| |
| |
| --|-
| |
|----------------------------------|
*/
backlink->source = &source->pads[source_pad];
backlink->sink = &sink->pads[sink_pad];
backlink->flags = flags;
backlink->is_backlink = true;
/*
绑定 子设备 mipi csi ----- 反向link ----- 多媒体设备
struct csi2_dev
struct v4l2_subdev sd; 绑定 entity---backlink
struct media_entity entity; | struct media_link {
struct list_head links; ---创建绑定---> struct list_head list;
struct media_gobj graph_obj------+
struct list_head list; ---|------+
| |
struct media_gobj graph_obj 绑定 多媒体设备--backlink | |
struct media_device *mdev; --------------------------------------------------+ | 挂载到多媒体设备中的 links 链表
struct list_head links ---------------------------------------------------------+
*/
media_gobj_create(sink->graph_obj.mdev, MEDIA_GRAPH_LINK,
&backlink->graph_obj);
/*
* link和backlink关联起来
*/
link->reverse = backlink;
backlink->reverse = link;
sink->num_backlinks++;
sink->num_links++;
source->num_links++;
return 0;
}
EXPORT_SYMBOL_GPL(media_create_pad_link);






![[附源码]Python计算机毕业设计Django的剧本杀管理系统](https://img-blog.csdnimg.cn/e4f70c9b36134f71a34df59f6c132917.png)
![[附源码]Python计算机毕业设计SSM乐跑(程序+LW)](https://img-blog.csdnimg.cn/711f667aa85e40f4a0ced66cf03bff3f.png)