此前出了目标检测算法改进专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读发表高水平学术期刊中的 SCI论文,并对相应的SCI期刊进行介绍,帮助大家解答疑惑,助力科研论文投稿。解读的系列文章,本人会进行 创新点代码复现,有需要的朋友可关注私信我获取。

一、摘要
为了提高YOLOv 5s(You Only Look Once v5 s)目标检测算法的准确性,提出了一种改进的YOLOv 5s目标检测算法CBAM-YOLOv 5s。卷积块注意模块(CBAM)被纳入YOLOv 5s骨干网络,以提高其特征提取能力。此外,完全交并(CIoU)损失被用作对象边界盒回归损失函数,以加快回归过程的速度。实验在Pascal Visual Object Classes 2007(VOC 2007)数据集和Microsoft Common Objects in Context(COCO 2014)数据集上进行,这些数据集广泛用于对象检测评估。在VOC 2007数据集上的实验结果表明,与原YOLOv 5s算法相比,CBAM-YOLOv 5s算法的查准率、查全率和平均查准率分别提高了4.52%、1.18%和3.09%。在COCO 2014数据集上,与原YOLOv 5s算法相比,CBAM-YOLOv 5s算法的查准率、召回率和mAP分别提高了2.21%、0.88%和1.39%。
二、网络模型及核心创新点
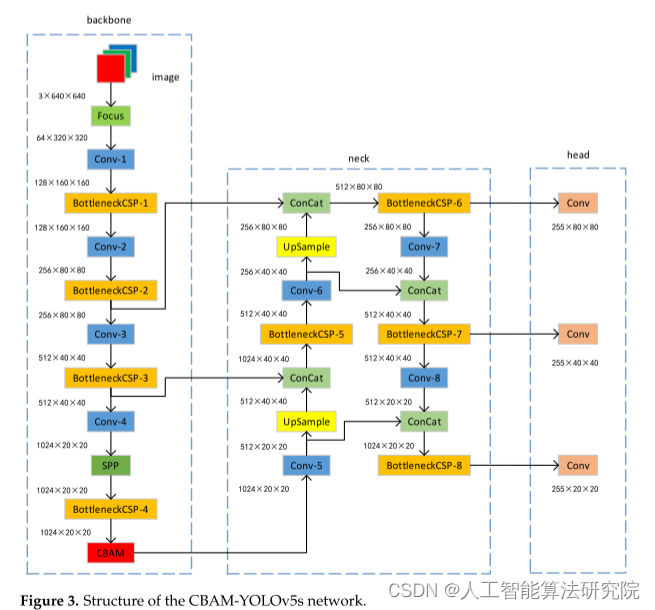
1.卷积块注意模块(CBAM)
2.完全交并(CIoU)
三、数据集
本实验中使用的数据集是Pascal Visual Object Classes 2007(VOC2007)数据集[28]和Microsoft Common Objects in Context(COCO2014)数据集。COCO 2014数据集共有80个类别的123,287张图像。VOC 2007数据集总共包含9963张图像。数据集中包括20个类,如图6所示;这些类别包括飞机、自行车、鸟、船、瓶子、公共汽车、汽车、猫、椅子、牛、餐桌、狗、马、摩托车、人、盆栽植物、羊、沙发、火车和电视监视器类别,并且相关联的XML文件提供输入图像的对象类别和对应的地面实况的坐标。

四、实验效果(部分展示)
1.消融实验
在实验训练过程中,随机梯度下降(SGD)优化算法用于更新模型参数。表3显示了在VOC2007数据集上获得的实验结果。
 通过对实验结果进行对比分析,可以得出本文算法比原算法和带SENet模块的算法具有更好的性能。SENet只包含信道关注度,只能获取信道上的重要特征信息,而CBAM不仅包含信道关注度,还包含空间关注度。它可以在信道和空间两个方面获得重要的特征信息,从而使网络能够更好地学习图像中的重要特征。网络学习的图片特征越多,它就能更好地识别物体,这将使网络的识别准确率更高。
通过对实验结果进行对比分析,可以得出本文算法比原算法和带SENet模块的算法具有更好的性能。SENet只包含信道关注度,只能获取信道上的重要特征信息,而CBAM不仅包含信道关注度,还包含空间关注度。它可以在信道和空间两个方面获得重要的特征信息,从而使网络能够更好地学习图像中的重要特征。网络学习的图片特征越多,它就能更好地识别物体,这将使网络的识别准确率更高。
2.比较实验
为了进一步验证改进算法的有效性,本文在COCO2014数据集上进行了对比实验。实验结果示于表4中。
从表4可以看出,与原YOLOv 5s算法相比,CBAM-YOLOv 5s算法的查准率、召回率和mAP分别提高了2.21%、0.88%和1.39%。基于表3和表4中的实验结果,可以得出结论,改进的CBAM-YOLOv 5s算法在VOC 2007数据集和COCO 2014数据集上优于原始YOLOv 5s算法。
五、实验结论
本文在YOLOv 5s骨干网中引入CBAM,优化YOLOv 5s骨干网的网络结构,并采用CIoU损失作为对象边界盒回归损失函数,加快回归过程的速度。为了验证所提出的算法的性能,进行了广泛的实验上的VOC 2007数据集。实验结果表明,与原YOLOv 5s算法相比,该算法的查准率、查全率和mAP都有显著提高;此外,使用CIOU损失是因为边界盒回归损失函数在收敛方面比GIOU损失快。本文算法在一定程度上解决了原YOLOv 5s算法检测精度不高的问题,但对于目标密集的复杂图像仍存在一定的检测误差和漏检问题。未来的研究将涉及不断优化所提出的算法的网络结构,以进一步提高其检测精度。
注:论文原文出自An Improved YOLOv5s Algorithm for Object Detection with an
Attention Mechanism本文仅用于学术分享,如有侵权,请联系后台作删文处理。
解读的系列文章,本人已进行创新点代码复现,有需要的朋友欢迎关注私信我获取 ❤ 。