考虑一个向量
a
\bold{a}
a对其进行旋转, 旋转用旋转矩阵
R
\bold{R}
R表示, 用朴素的倒数定义进行求导而不是用扰动模型, 我得到了这个过程与结果
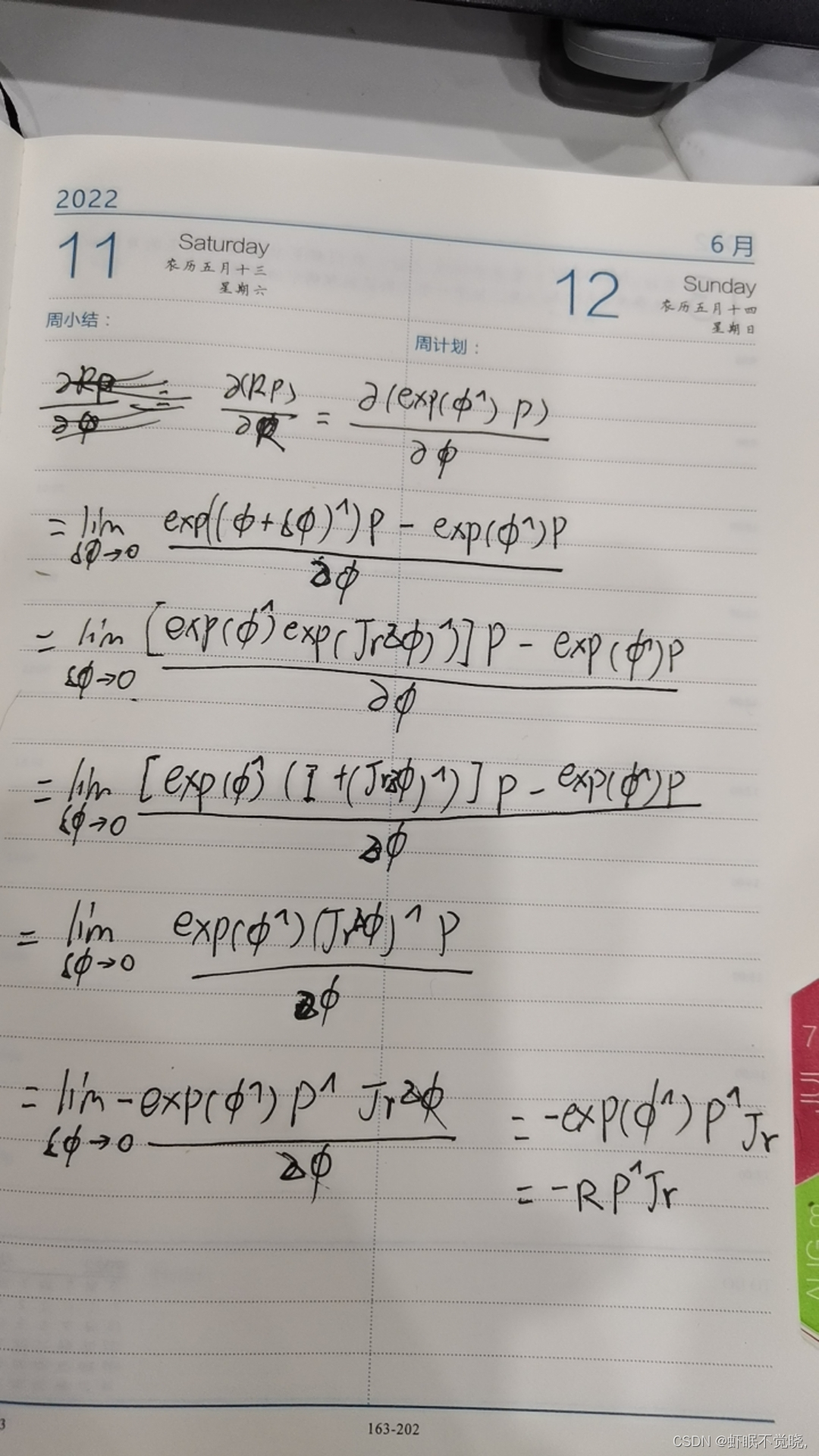
和高博的新书结果
−
R
J
r
a
∧
-\bold{R}\bold{J}_{r}\bold{a}^{\wedge}
−RJra∧结果不一样, 雅克比矩阵位置不同, 是不是他错啦, 希望有人解答
用右雅克比对旋转矩阵进行求导
news2026/2/9 9:07:31
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/490972.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
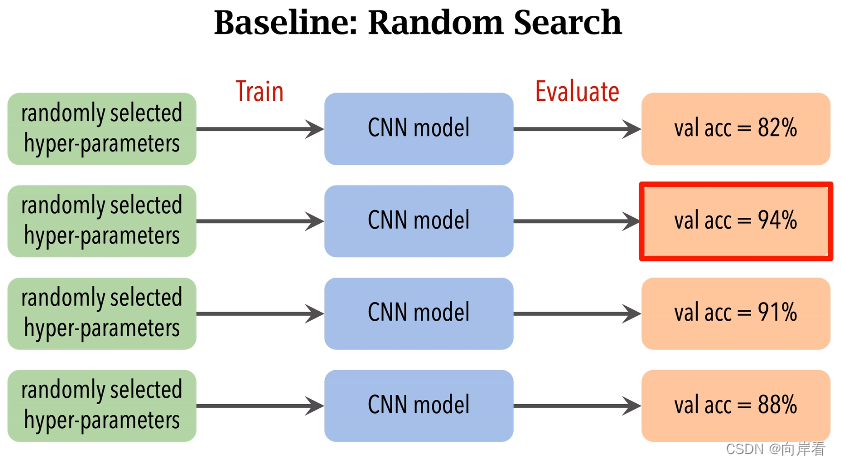
神经网络结构搜索NAS
推荐课程:神经网络结构搜索
感谢博主ShusenWang提供的课程讲解!
目录
1. 为什么要学习神经网络结构搜索NAS?
2. 什么是神经网络结构搜索NAS?
(1)随机搜素Random Search 1. 为什么要学习神经网络结构搜…

位图的简单实现和使用
文章目录 1. 什么是位图2. 位图的简单实现3. 测试位图代码 1. 什么是位图
位图, 是一种非常常见的结构, 它使用每个二进制位来存放一个值的状态, 就类似于 Java 当中 HashSet 存储元素的功能.
在 Java 当中, 可以使用HashSet完成如下操作:
add(T v): 添加一个元素到 HashSet…
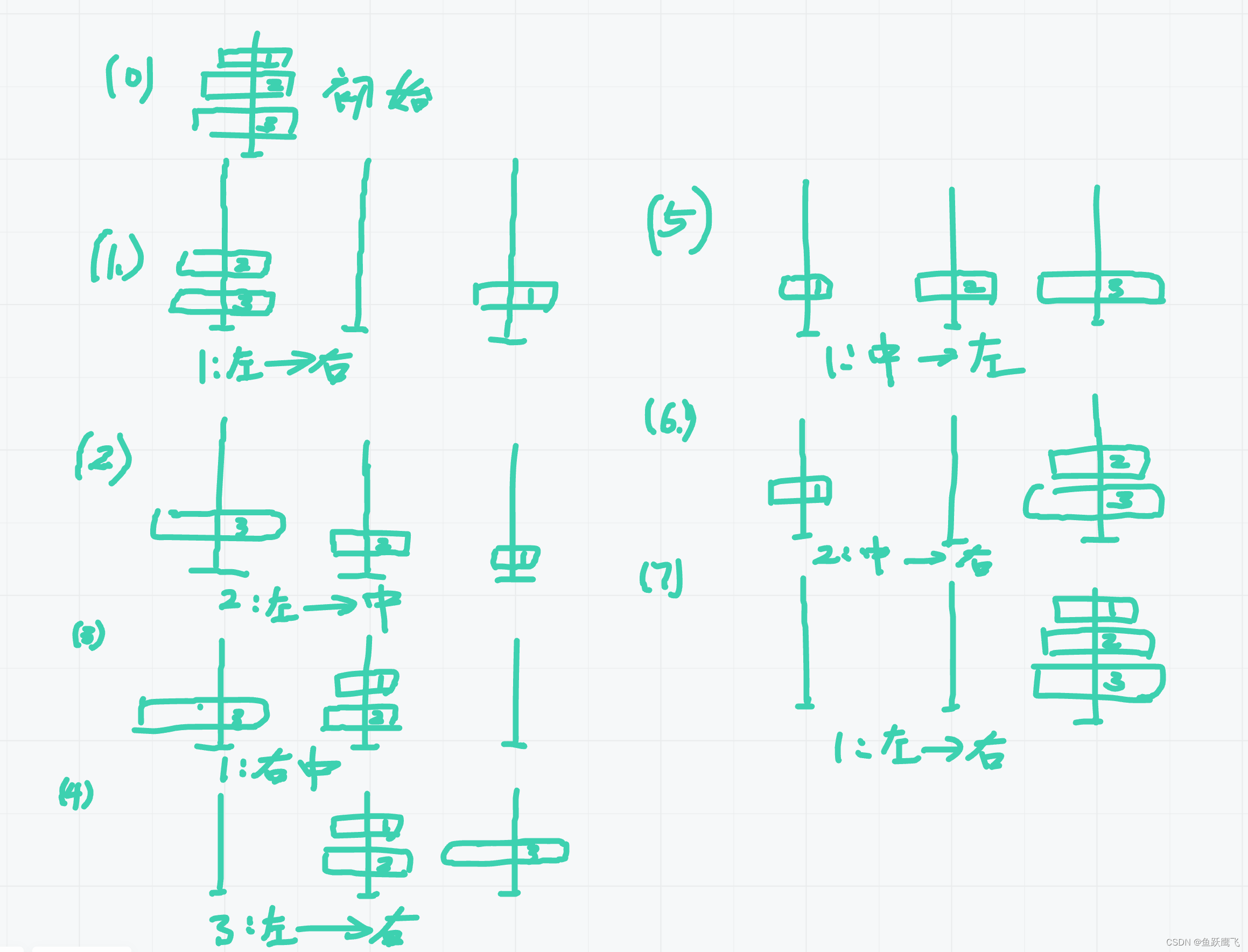
算法:递归启蒙-汉诺塔
基本所有的讲递归的书和视频都会以汉诺塔作为开始,因为它足够经典
汉诺塔问题要求整个挪动的过程中都符合小压大的原则,就是如果同一个柱子上有超过1个的话,那必须下面是最大的,上面依次变小,不能出现大盘压小盘的情况…
Element Plus的Pagination 组件用法
5.2 Pagination 组件
分页组件通常与表格组件一同使用,在数据量很大的时候,通常不会在表格中一次性显示所有的数据,因为如果所有数据都展示在一个页面,数据量庞大,容易造成浏览器崩溃,就算数据可以完全展…
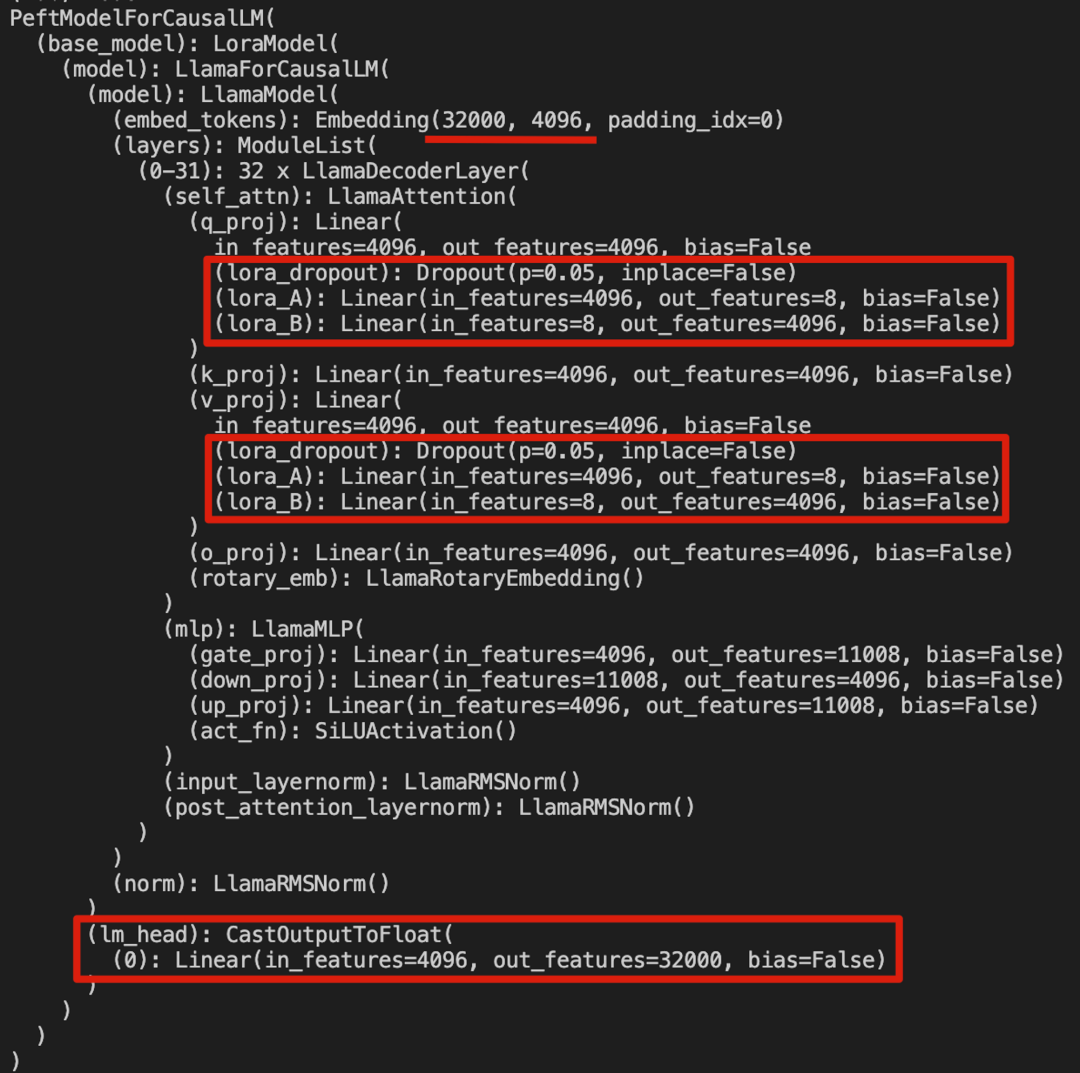
【CV2NLP】Chinese-Vicuna 中文小羊驼
学习一个短语!
gain proficiency in 熟练掌握
(用我最爱的文心一言造个句子) 最近羊驼家族百花齐放,赶紧学习一下 ChatBot 的背后细节。Chinese-Vicuna 中文小羊驼是基于 Vicuna 模型使用中文数据 LORA 方案来微调的一种中文对…
数值分析-牛顿-柯特斯公式的概念、推导与应用
目录
一、引言
二、牛顿-柯特斯公式的基本概念
三、牛顿-柯特斯公式的推导
四、牛顿-柯特斯公式的应用
五、牛顿-柯特斯公式的优缺点
六、总结 一、引言
数值分析是数学中的一个重要分支,它研究如何利用数值方法来解决实际问题。在数值分析中,牛顿…
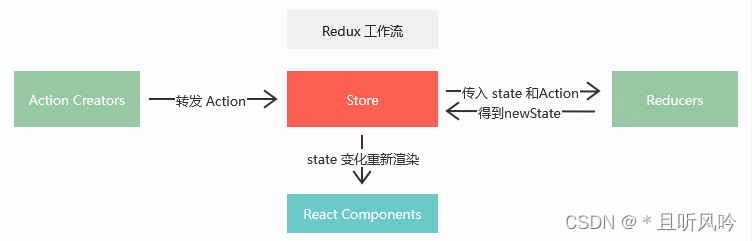
Redux 学习系列(一) —— 基础概念入门篇
简介
Redux 是一个可预测的 JavaScript 应用状态管理容器,也可以说是一个应用数据流框架。
作用
Redux 主要是用作应用状态的管理。它抽离所有组件的状态,构造一个中心化的单独常量状态树(对象)来保存这一整个应用的状态。这棵…
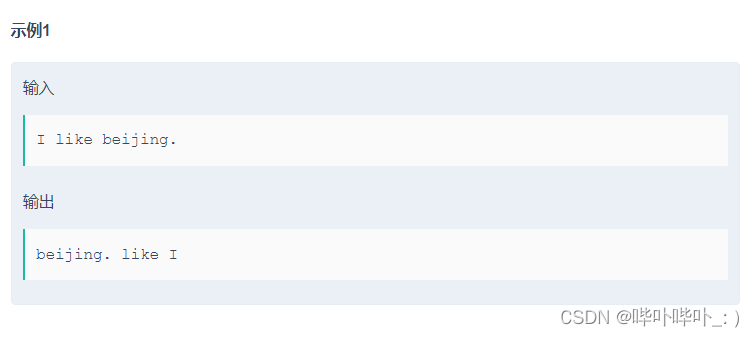
Java经典笔试题—day02
Java经典笔试题—day02 🔎选择题🔎编程题🥝排序子序列🥝倒置字符串 🔎结尾 🔎选择题
(1)A 派生出子类 B , B 派生出子类 C ,并且在 java 源代码有如下声明:
A a0new A(…
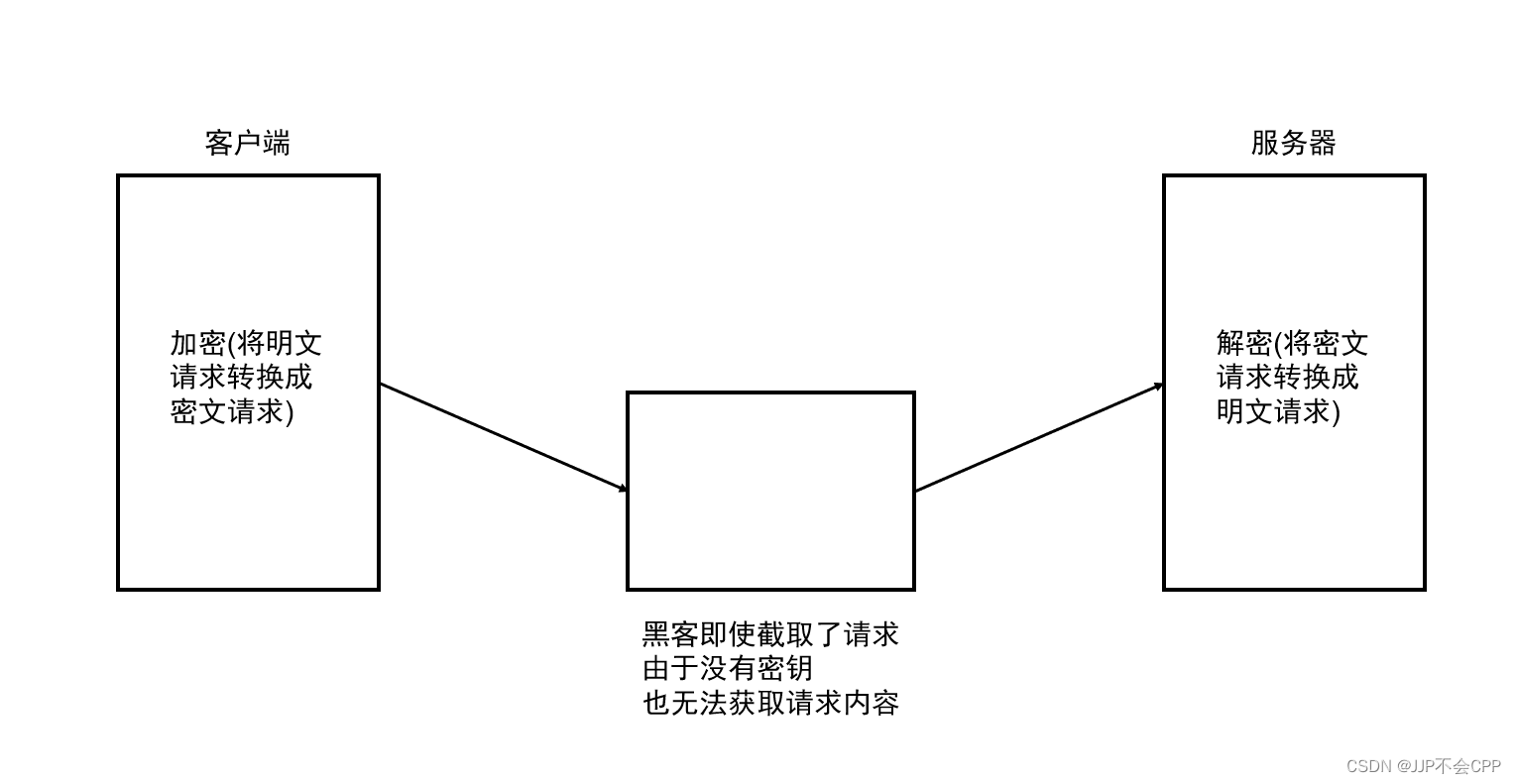
【数据库】面试高频问题汇总及详细解答
【C语言部分】面试高频问题汇总及详细解答 【操作系统(Linux)】面试高频问题汇总及详细解答 【计算机网络】面试高频问题汇总及详细解答 本文目录 1. SQL1.1 介绍一下数据库分页1.2 介绍一下SQL中的聚合函数1.3 表跟表是怎么关联的1.4 说一说你对外连接的了解1.5 说说SQL中怎么…
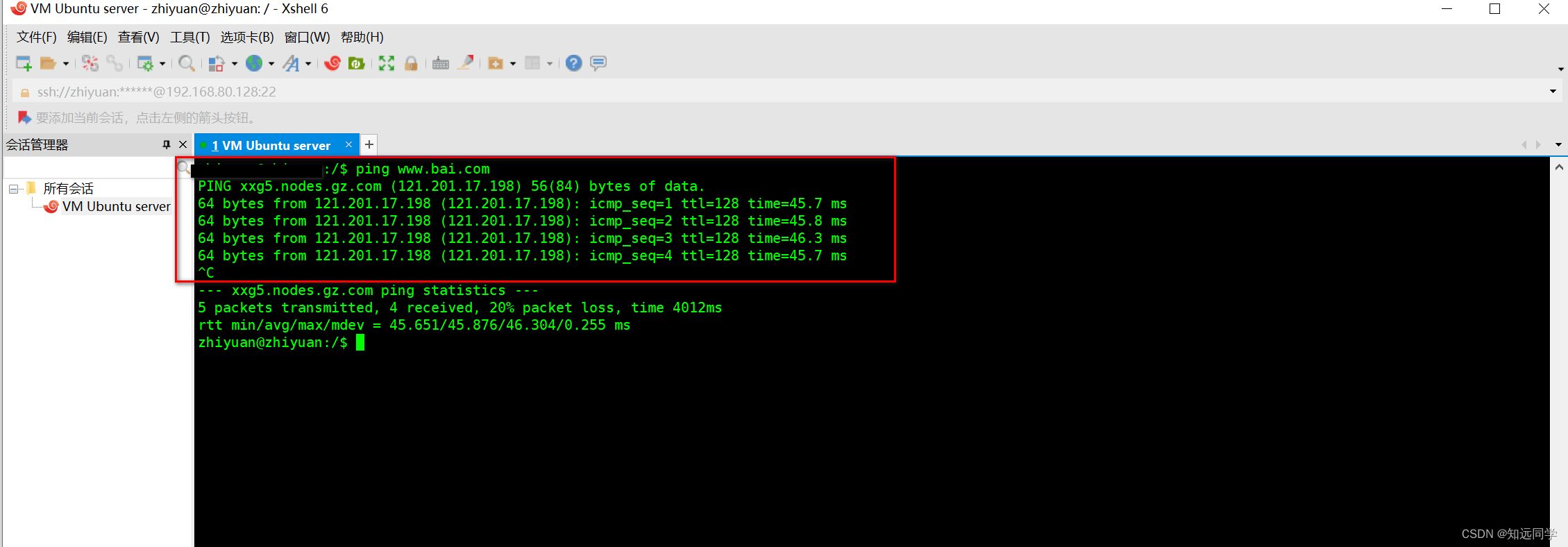
VM虚拟机安装Ubuntu server 22.04网络问题
在使用vm虚拟机安装ubuntu server 22.04的时候会遇到一些网络问题,例如虚拟机内的Ubuntu不能上网,ping www.baidu.com不通,主机使用远程工具不能建立远程连接,Ubuntu ping本地主机不通,本地主机ping虚拟机也不通的问题…
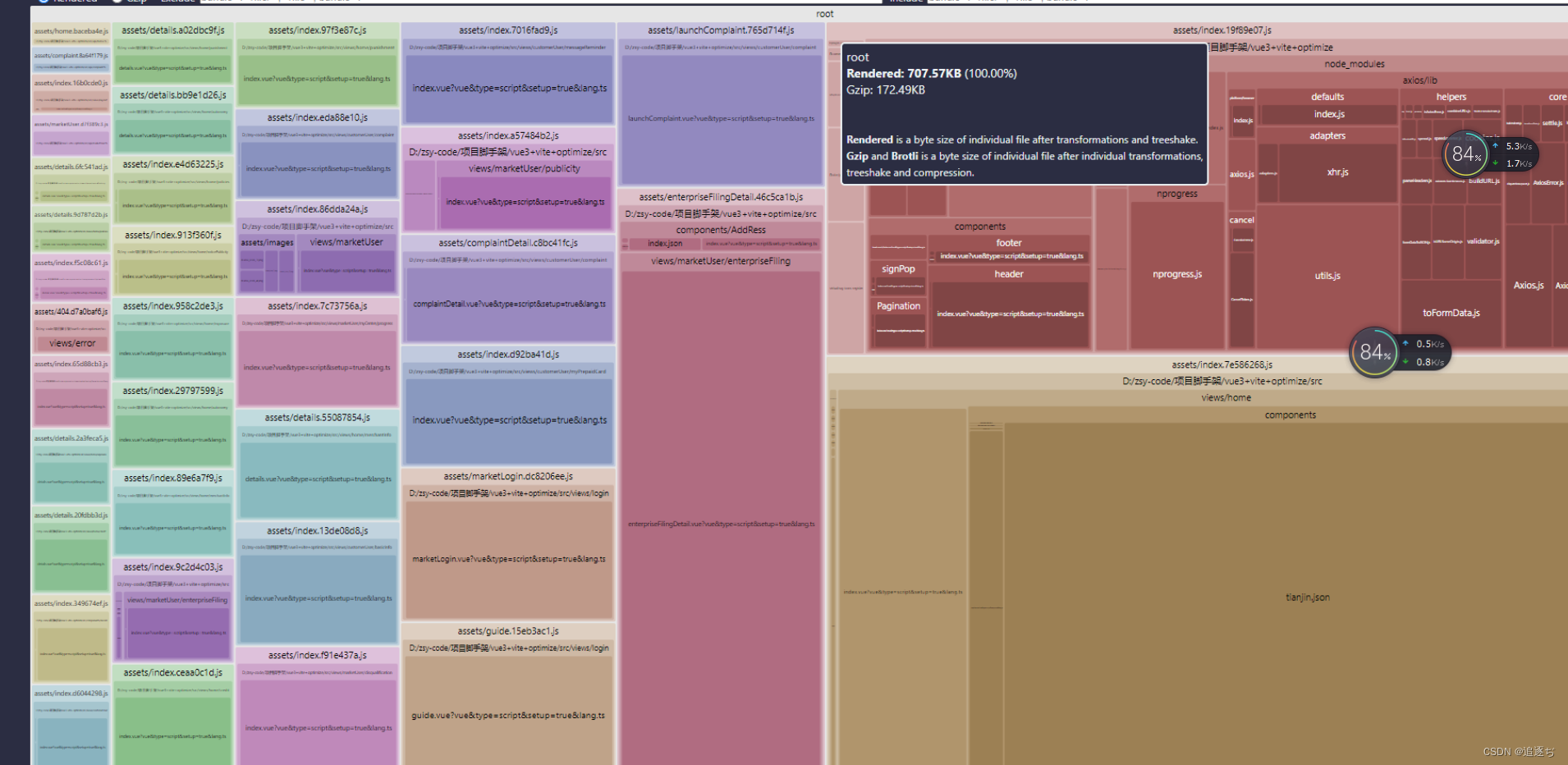
vue3+vite项目优化。
最近开发的一个vue3vitets项目,build后发现体积过大,所以针对于项目体积进行一次优化。
一: 使用rollup-plugin-visualizer 可视化分析包
npm i rollup-plugin-visualizer -S
在vite.config.js中引入 在 plugins里面 然后执行npm run build就自动打开…

最新开源Chatgpt人工智能对话源码系统如何搭建?含详细安装教程分享和源码
人工智能对话系统市场需求正在不断增长。随着人们对智能化、自动化服务的需求不断提高,人工智能对话系统成为越来越多企业和组织的首选解决方案,可以有效提升用户体验、降低成本、提高效率。
一、Chatgpt人工智能对话源码系统定义
ChatGPT是一种基于深…

流量挂机赚钱项目Traffmonetizer
利用闲置电脑/服务器/安卓手机/树莓派来赚点电费
简介
Traffmonetizer是一个来自欧洲的流量挂机平台,类似Peer2profit,满10刀可提现(Paypal、BTC、Payoneer),注册好像就送5刀,Traffmonetizer不怎么占用CPU和内存以及流量&#x…
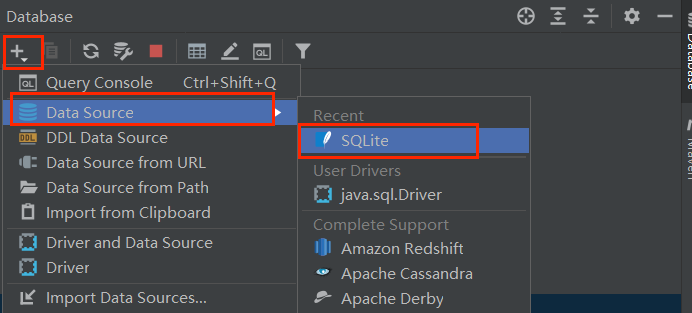
【五一创作】嵌入式Sqlite数据库【基本语法、Sqlite-JDBC、嵌入到Java程序】
目录 前言
基本介绍
Sqlite 对比 MySQL
字段类型
语法
创建表
插入数据
更新数据
查询数据
删除数据
查看建表语句
Sqlite-JDBC
嵌入到Java程序 前言 最近在用JavaFX做一个桌面软件需要用到数据库,但MySQL这种数据库明显只能本地访问,把软…

双金属复合圆管层间高温接触热阻测试方法的分析和选择
摘要:双金属复合圆管因其优越的特性在越来越多的领域得到广泛应用,而其层间接触热阻是这种圆管作为换热管时的重要性能指标。本文针对这种双金属复合圆管层间接触热阻的测试需求,分析和对比了现有用于接触热阻测试的各种稳态和瞬态方法&#…
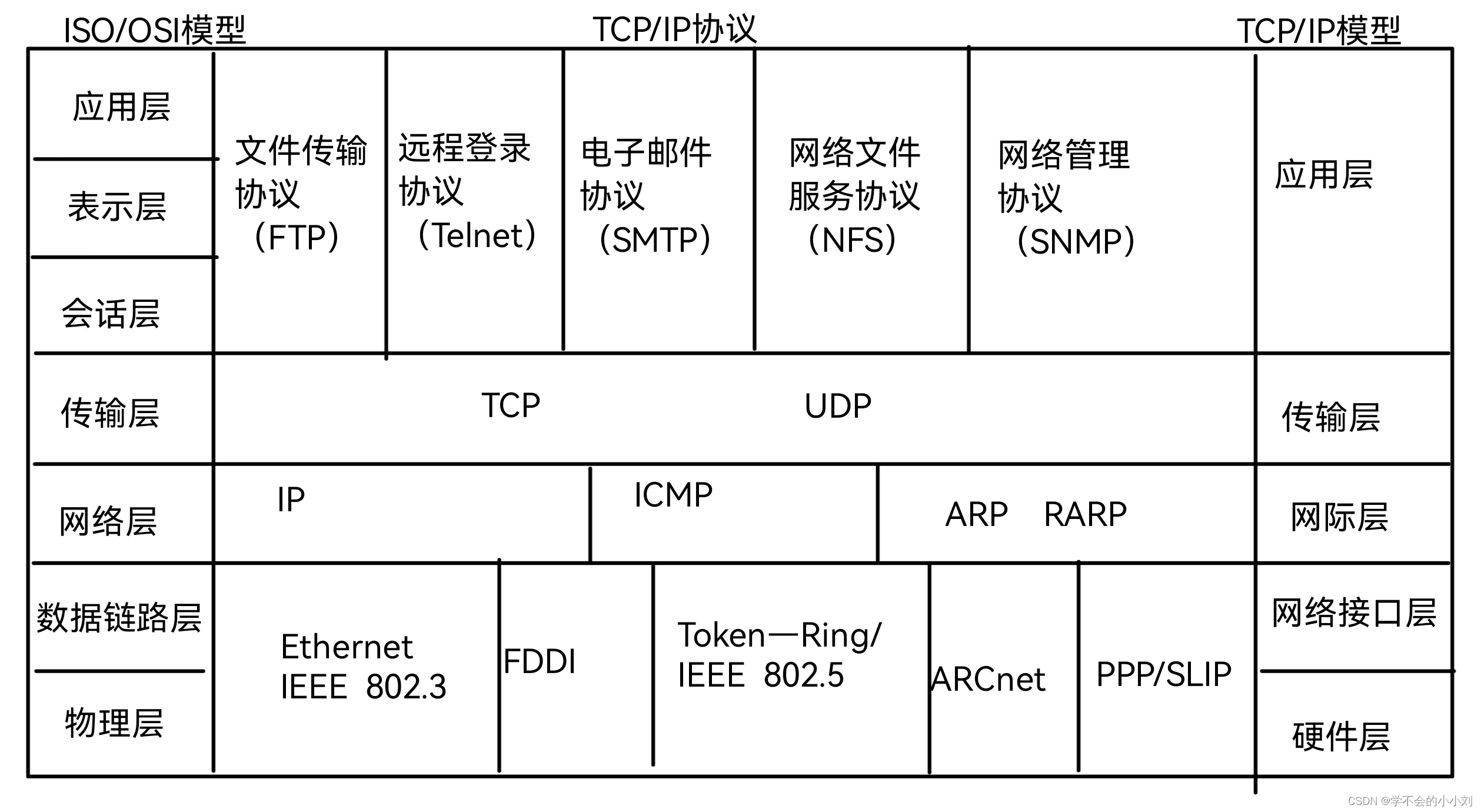
网络应用基础 ——(2023新星计划文章一)
一,网络的概念
1.1网络及其带来的好处
(1)计算机网络是指通过通信设备和通信线路将多台计算机连接起来,以便实现资源共享、信息传递和协同工作的技术和系统。计算机网络是现代信息技术的重要组成部分,已经深入到我们…

代码随想录算法训练营第三十一天 | 贪心1,想不到怎么找局部最优就做不出来
贪心算法理论基础
代码随想录 (programmercarl.com)
贪心算法理论基础!_哔哩哔哩_bilibili 贪心的本质是选择每一阶段的局部最优,从而达到全局最优。 例如,有一堆钞票,你可以拿走十张,如果想达到最大的金额ÿ…