1.LQR Question Background
之前写过连续系统的黎卡提方程Riccati推导,但是考虑到实际工程落地使用的是离散系统,于是又进行了离散黎卡提方程Riccati的公式推导。
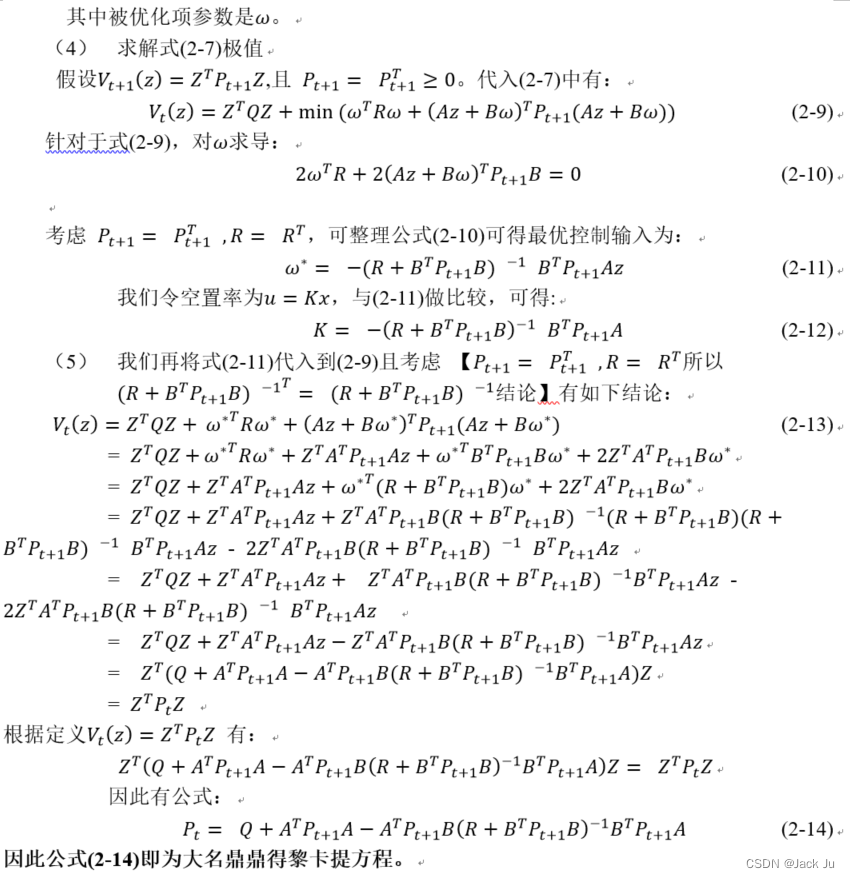
2.Proof of Riccati Equation Formula for Discrete Systems
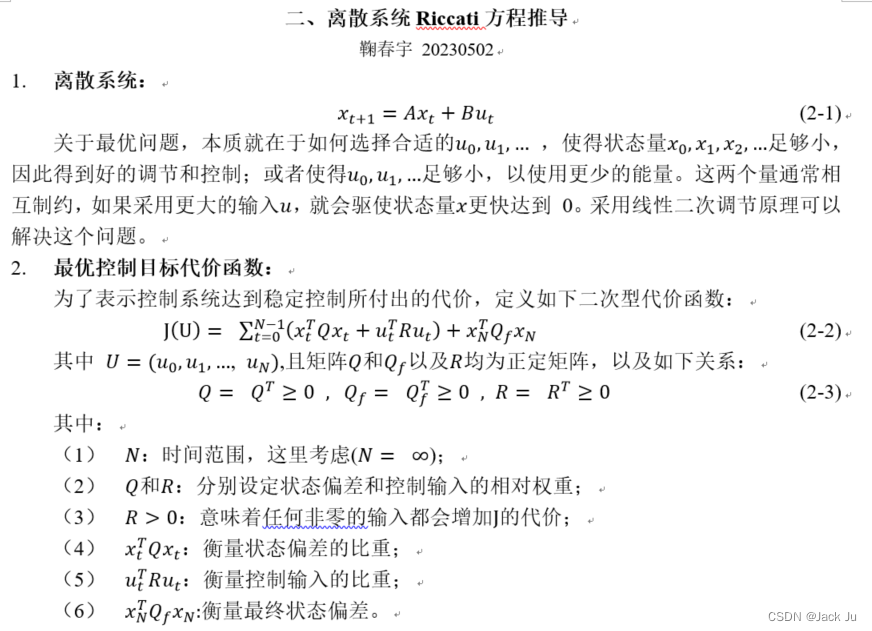
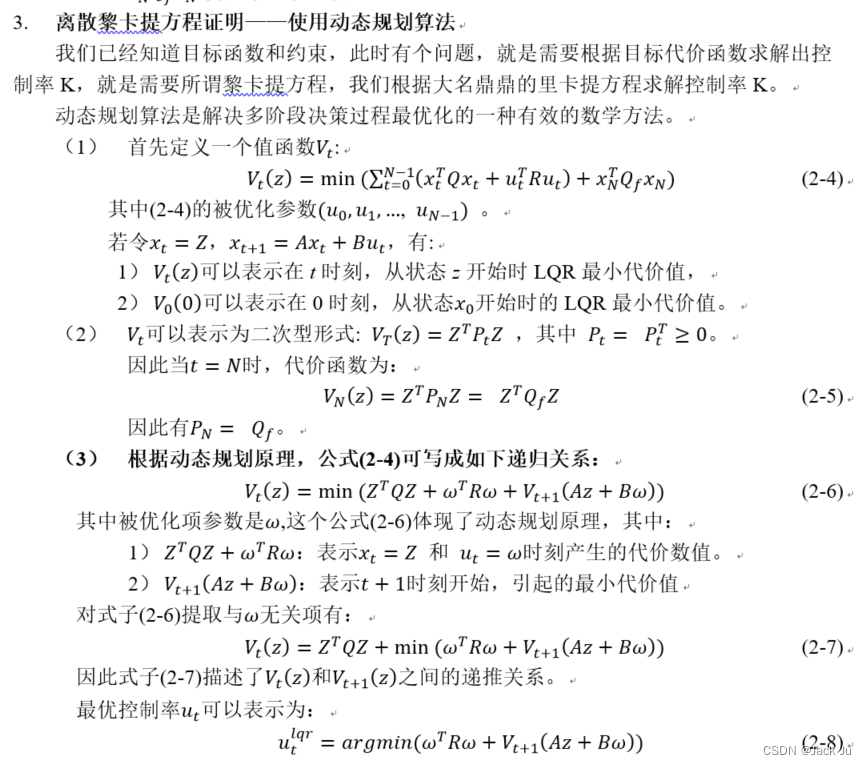
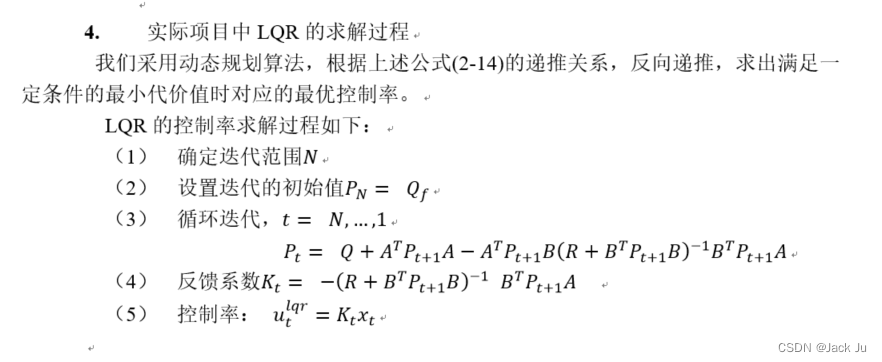
工程化落地,就是使用公式(2-14)实时计算控制率K,进而得到最优的控制输入,达到最有控制的效果,需要注意的是Q和R矩阵的选取。
Q、R就是需要设计的半正定矩阵和正定矩阵。考虑根据实车的情况去标定此参数,从理论和工程层面去理解,如果增大Q、减小R,则此时控制系统响应速度比较快速(比较剧烈),直观反映方向盘打得又快幅度又大。如果增大R减小Q,则此时控制系统的响应速度慢,方向盘打得比较慢(比较温柔)。
3.My Related Works
- 自动驾驶——最优控制算法里卡提方程推导【连续系统】
- 自动驾驶-LQR工程实现(调研)
- 自动驾驶-最优控制方法LQR的C语言工程实现【附Github源码链接】
- 自动驾驶-动力学模型-状态空间法A矩阵----c语言实现【附Github源码链接】
4.Referance
1.基础算法 - LQR - 离散时间有限边界
20230502
鞠春宇