目录
- 1.4.1 通讯管理:ModBus通信发送非整型数据的方法
- 1.4.2 通讯管理:使用Modbus TCP通讯协议与流程交互
1.4.1 通讯管理:ModBus通信发送非整型数据的方法
描述
环境:VM4.0.0
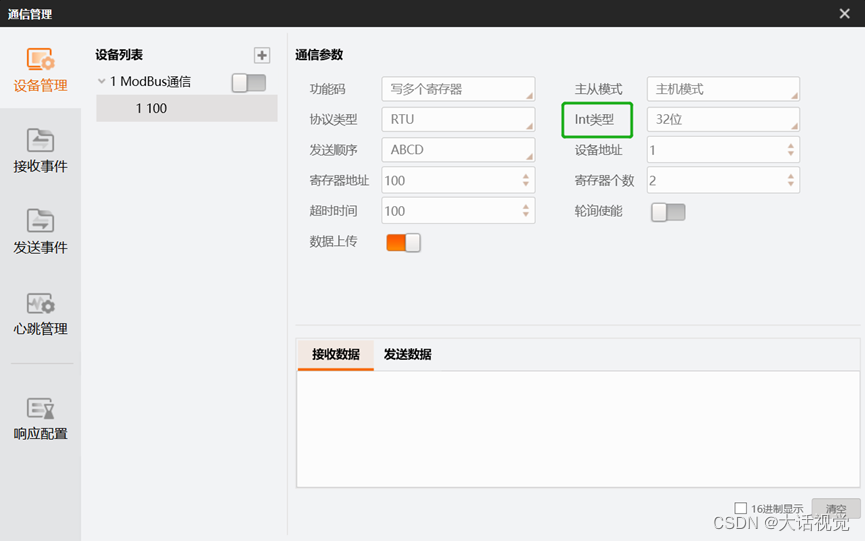
现象:Modbus通信发送数据只能为Int类型,如下图所示:
解答
-
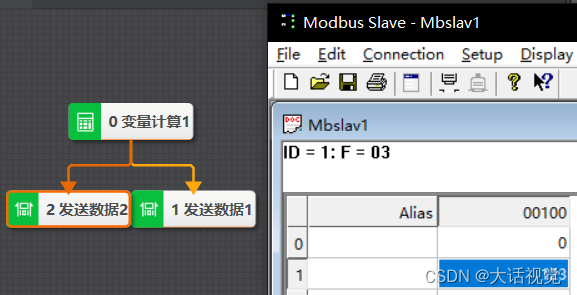
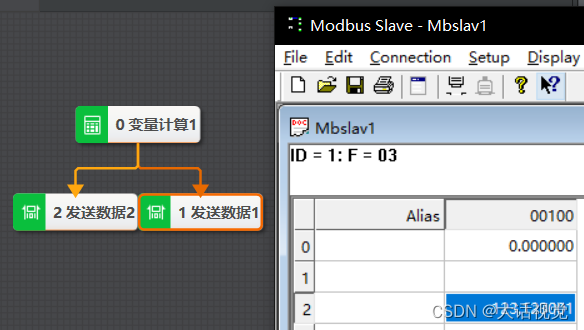
可以发送Int和Float数据,如下图所示:
-
通信设备配置如下:


-
发送事件配置如下:


问题根因
- 通信管理界面显示有问题,显示为Int类型存在一定误导;
- 可以发送Int与Float类型,一般Float类型乘以1000后都可以转化为Int类型。
1.4.2 通讯管理:使用Modbus TCP通讯协议与流程交互
描述
环境:VM4.0.0
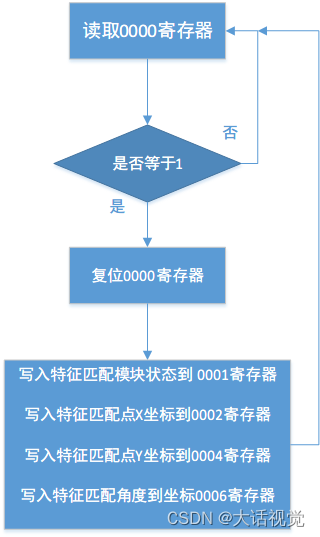
问题:使用Modbus TCP 通讯协议与视觉通讯,当地址为0000的保持型寄存器(4x寄存器)变为1时,触发视觉流程执行一次,同时视觉将地址为0000的寄存器复位(也即写为0),视觉流程执行完成后,将结果数据:特征匹配状态、特征匹配点X、特征匹配点Y、特征角度分别写入到地址为0001,0002,0004,0006的保持型寄存器中。
解答
VM4.0相比VM3.X最大的改进就是新增了网关功能,能够满足视觉和绝大多数上位机,机器人,PLC通过用户自定义协议通讯。这个问题主要涉及4个知识点。
- 全局模块中通讯设备的创建
- 通讯接收事件与全局触发的关系
- 通讯发送事件的使用
- 发送整数和浮点数到Modbus寄存器
首先第一步:创建通讯设备,在工具栏中点通讯管理图标,进入通讯管理界面,图标如下图黄色箭头所示:

进入通讯管理界面后,创建一个Modbus通讯设备如下图所示:

注意目标IP,填的是PLC的IP地址,在本例中由于没有连接实际的PLC,是以Modbus仿真设备来模拟,所以IP地址填127.0.0.1,目标端口要填502,因为Modbus TCP 协议默认端口就是502。
第二步添加触发流程运行一次的寄存器地址,注意轮询使能要打开,设置如下图所示:
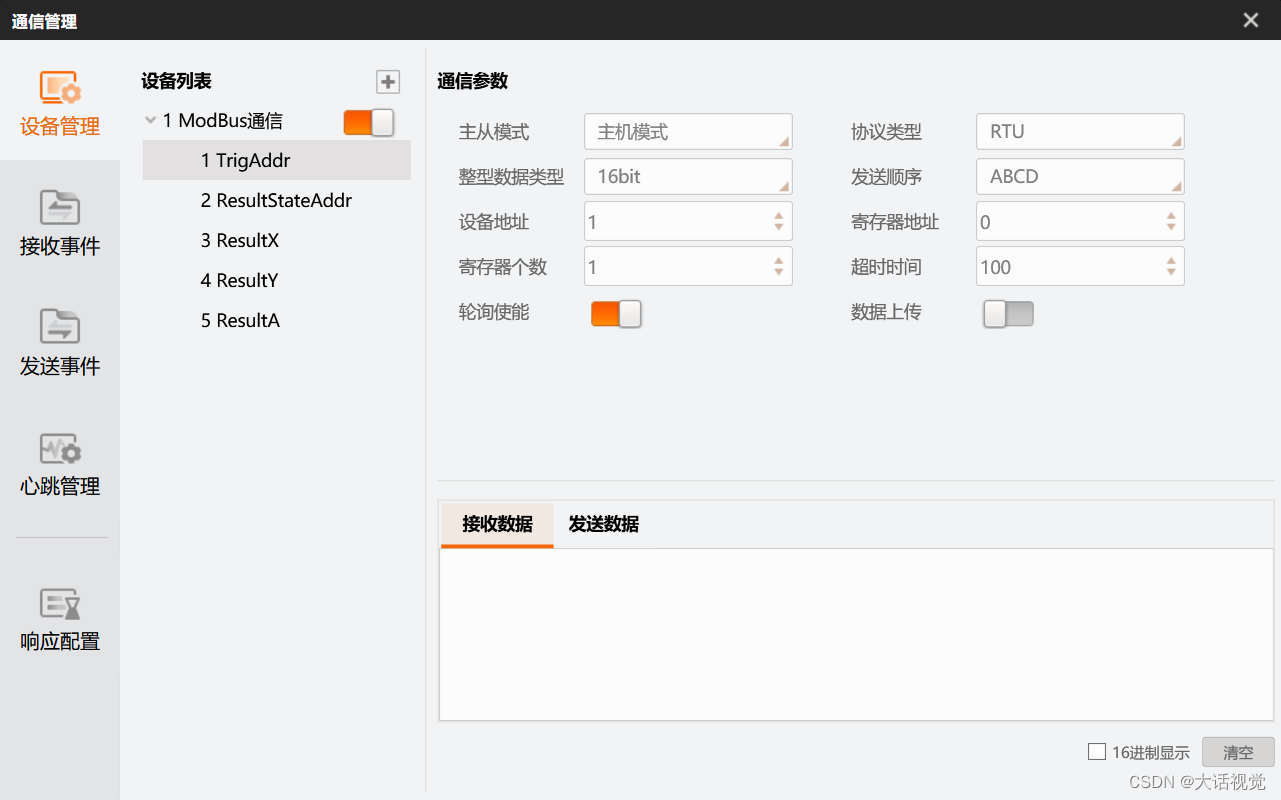
这里要注意地址的数据类型,寄存器个数,发送顺序。发送顺序和PLC类型有关,有的PLC使用大端模式,有的PLC使用小端模式(所谓大端模式,小端模式也就是数据的高低字节顺序不同,大端是指数据的高字节保存在内存的低地址中,而数据的低字节保存在内存的高地址中,小端模式恰恰相反)。
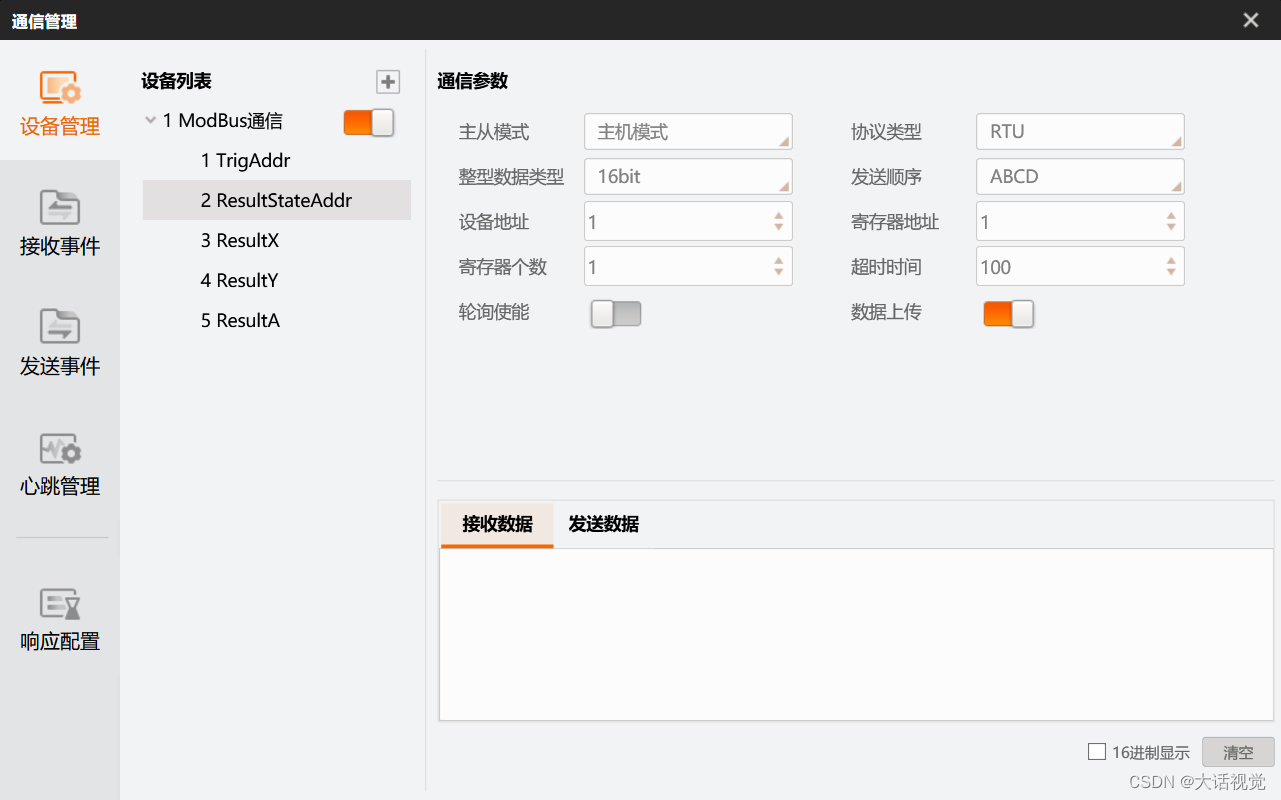
添加特征匹配模块状态状态寄存器地址,由于这个是写入寄存器,轮询不必打开,如下图所示:
添加特征匹配坐标X存放地址,由于这个是写入寄存器,轮询不必打开,如下图所示:

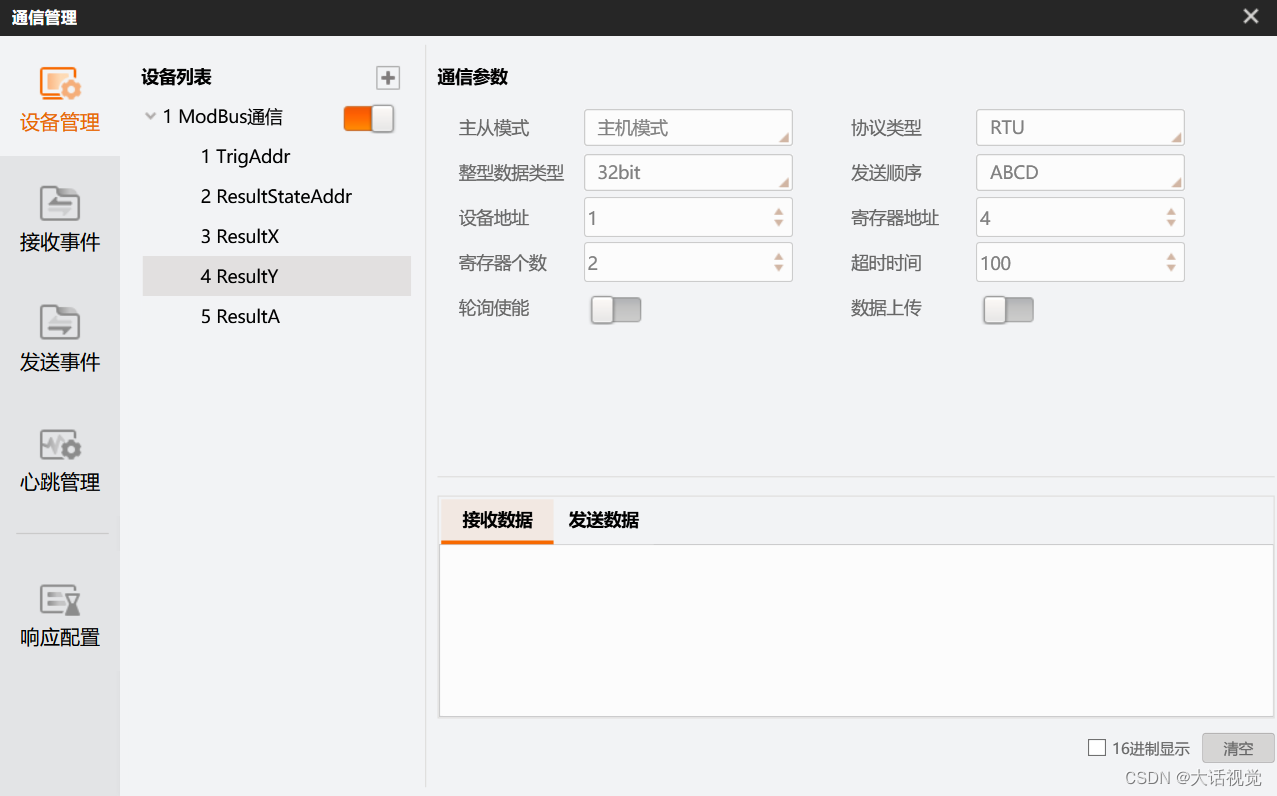
添加特征匹配坐标Y存放地址,由于这个是写入寄存器,轮询不必打开,如下图所示:
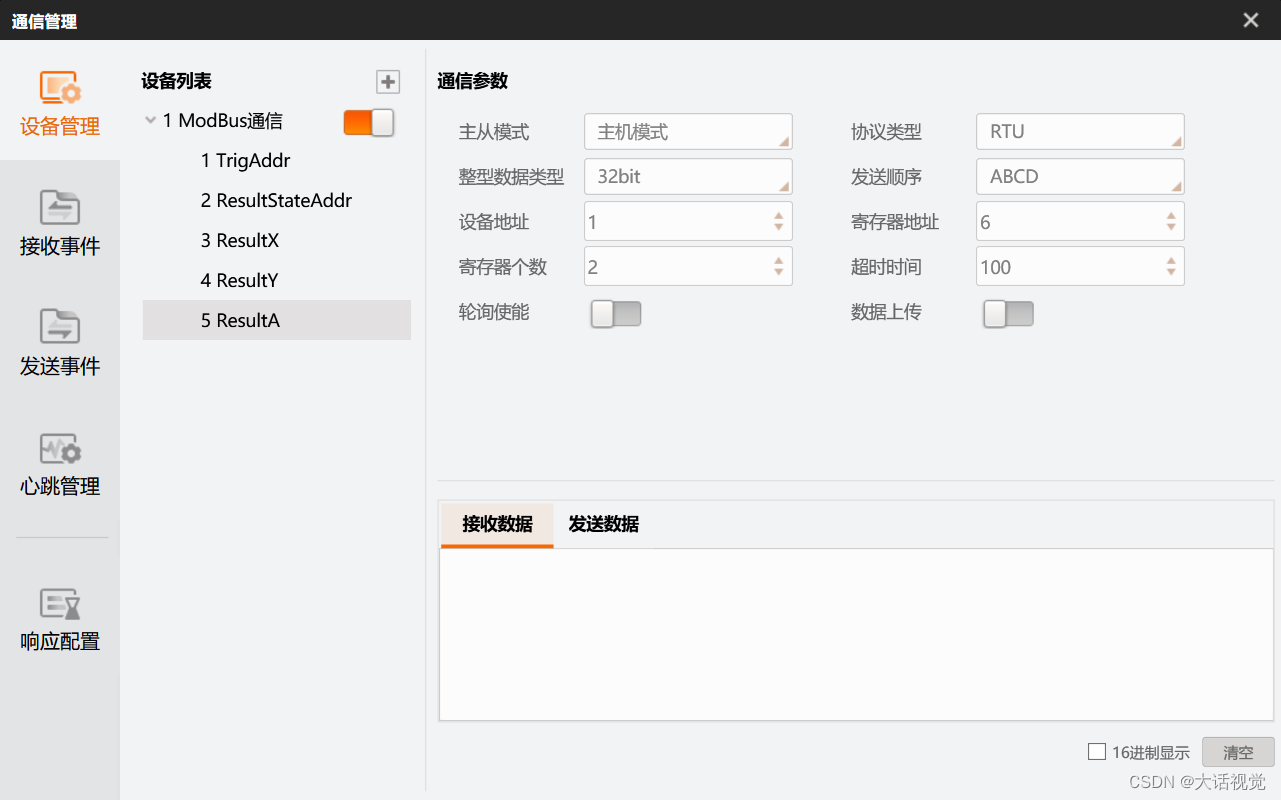
添加特征匹配角度存放地址,由于这个是写入寄存器,轮询不必打开,如下图所示:
第三步,定义接收事件,如下图所示:
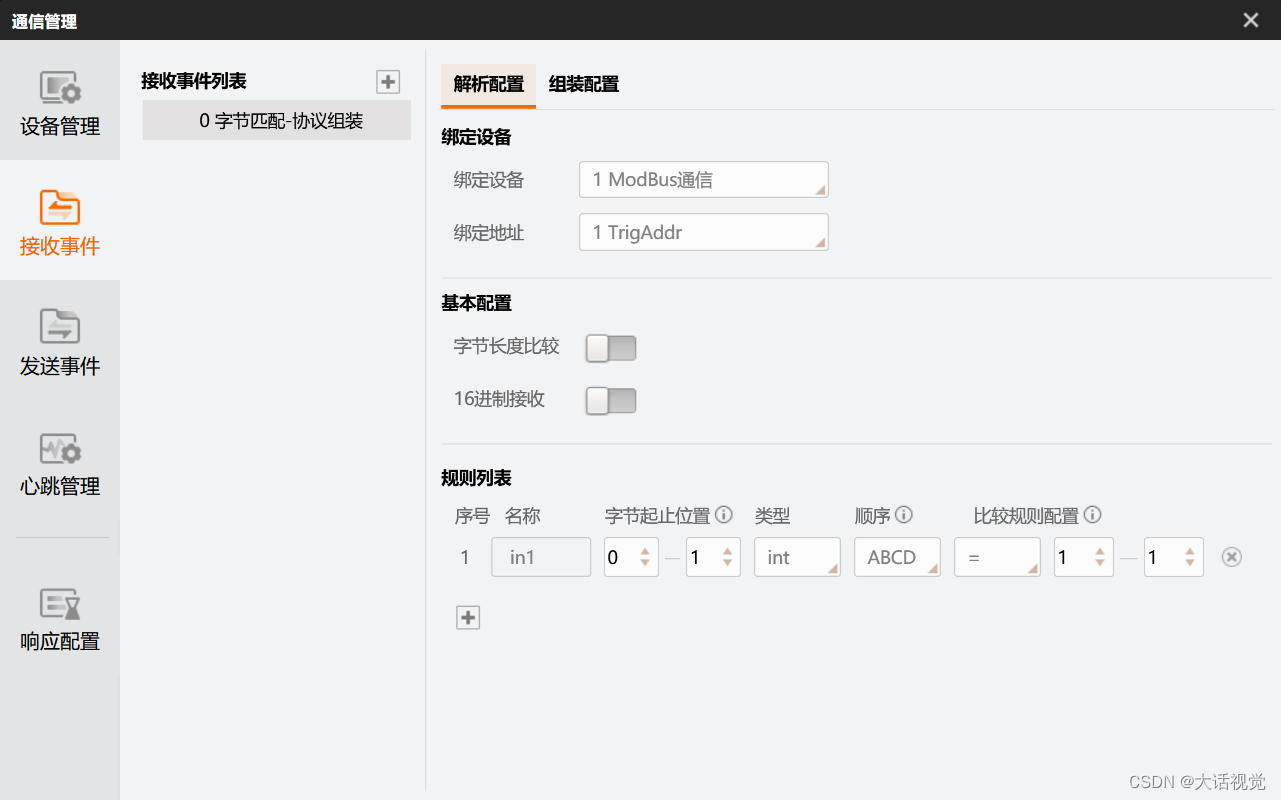
在接收事件中,绑定地址下拉选择之前添加的触发寄存器地址。
在规则列表中,定义规则,如上图所示。
第四步,配置全局触发,在工具栏中点全局触发图标,如下图黄色箭头所示图标:
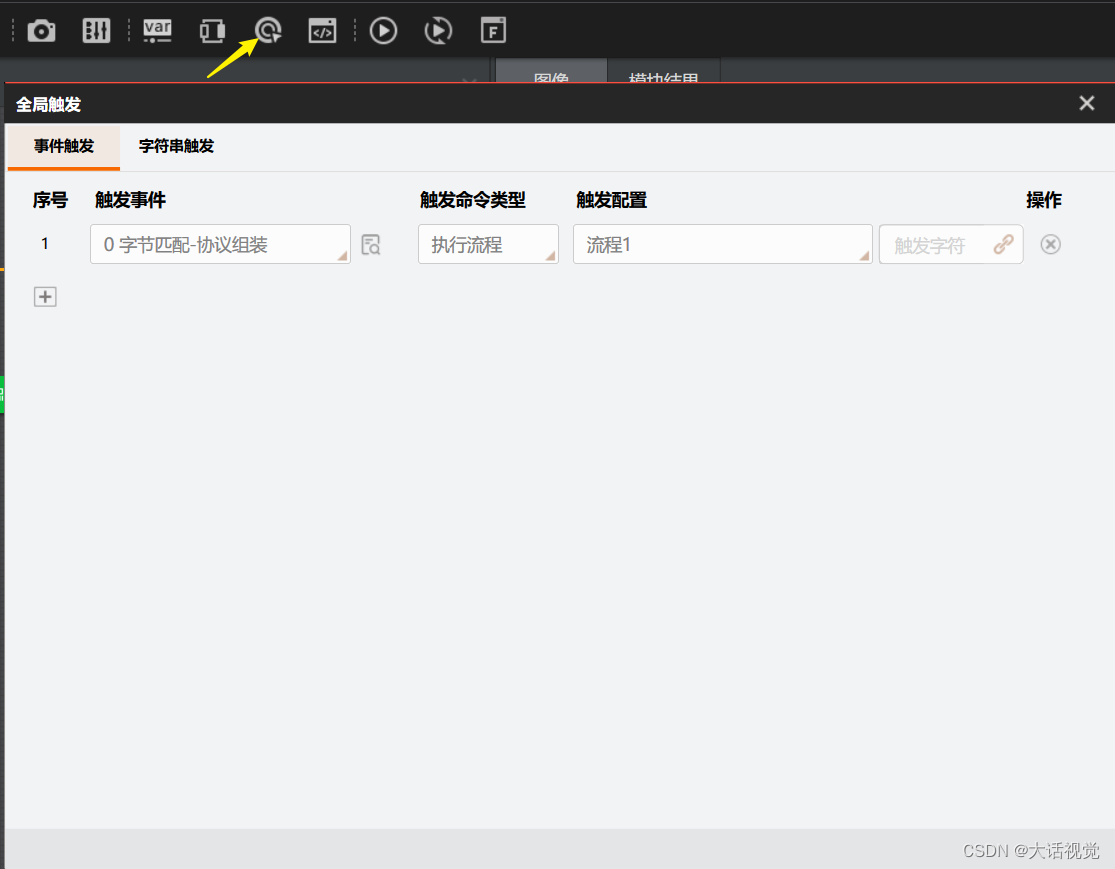
点击黄色箭头所示图标进入全局触发设置,选择事件触发Tab页,在触发事件中下拉选择上一步配置好的接收事件,触发命令类型选择执行流程,触发配置选择流程1,触发字符无需填写。
第五步,定义发送事件,如下图所示:
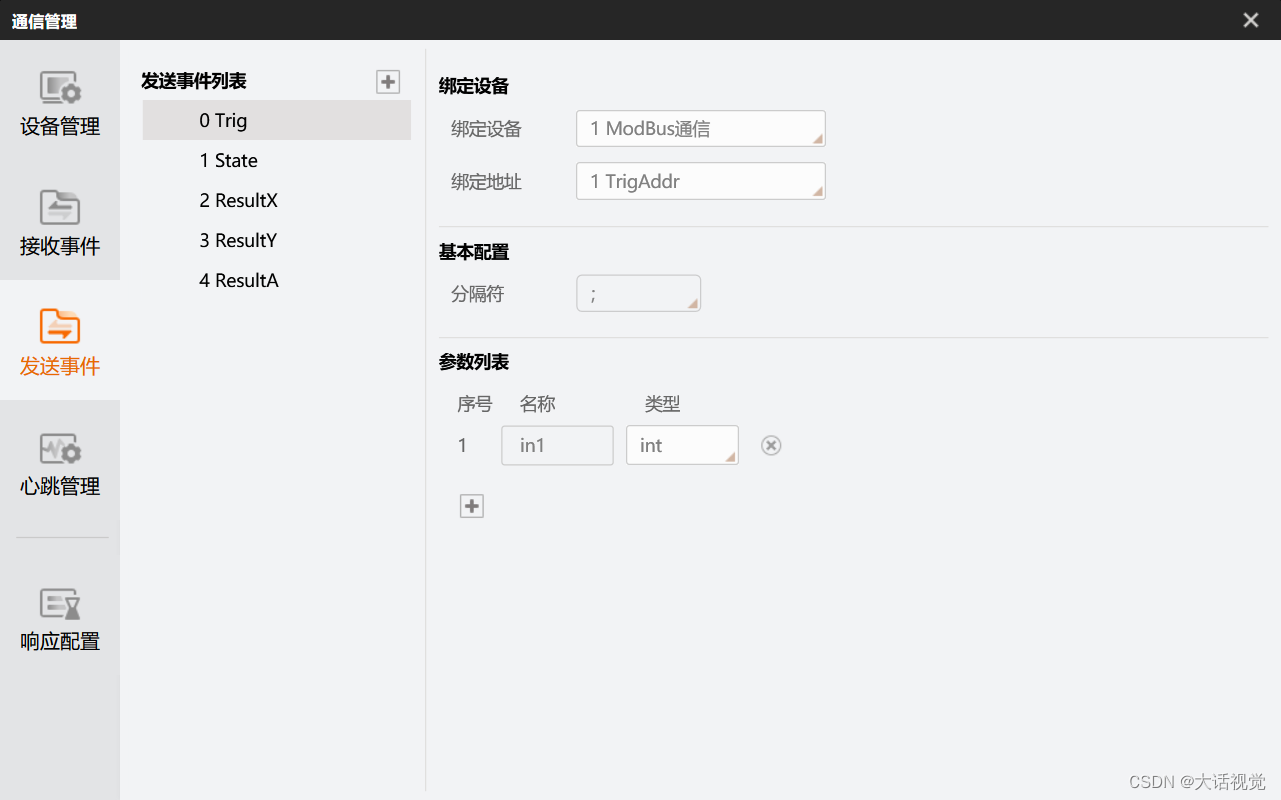
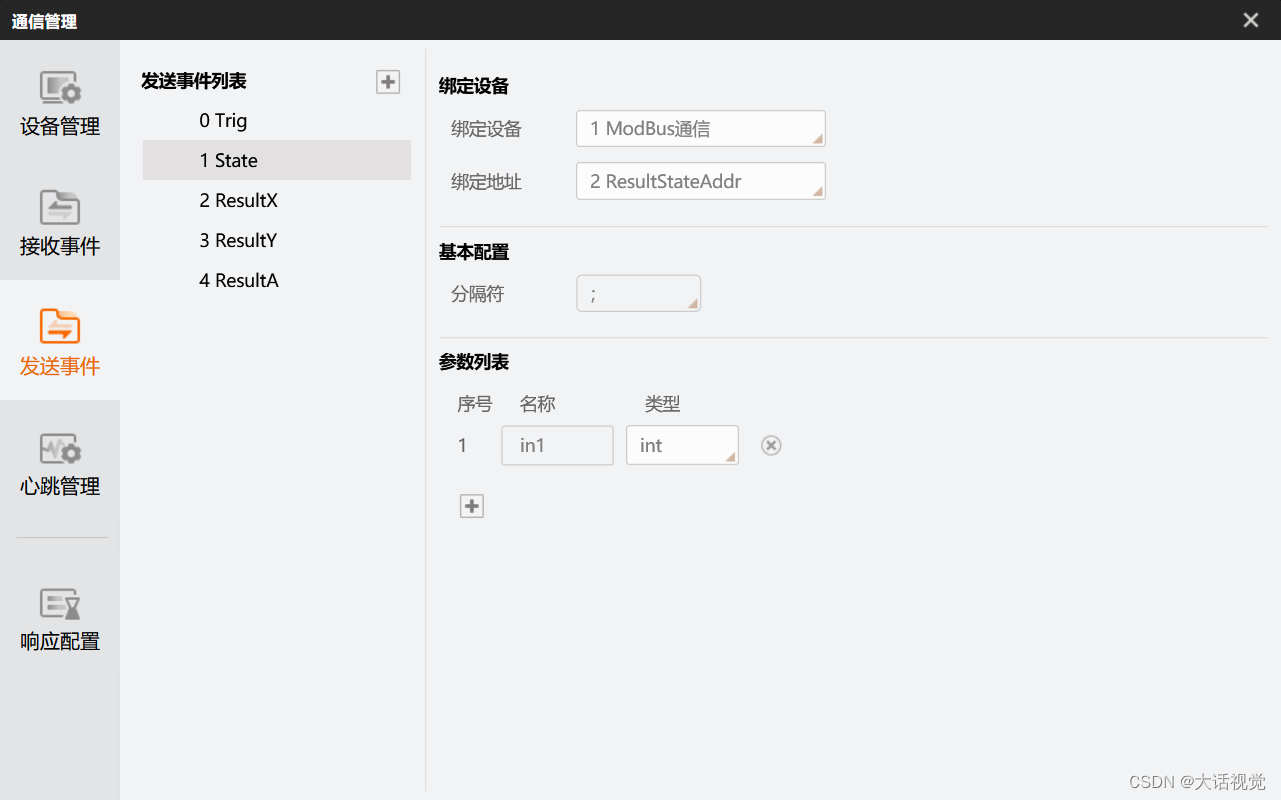
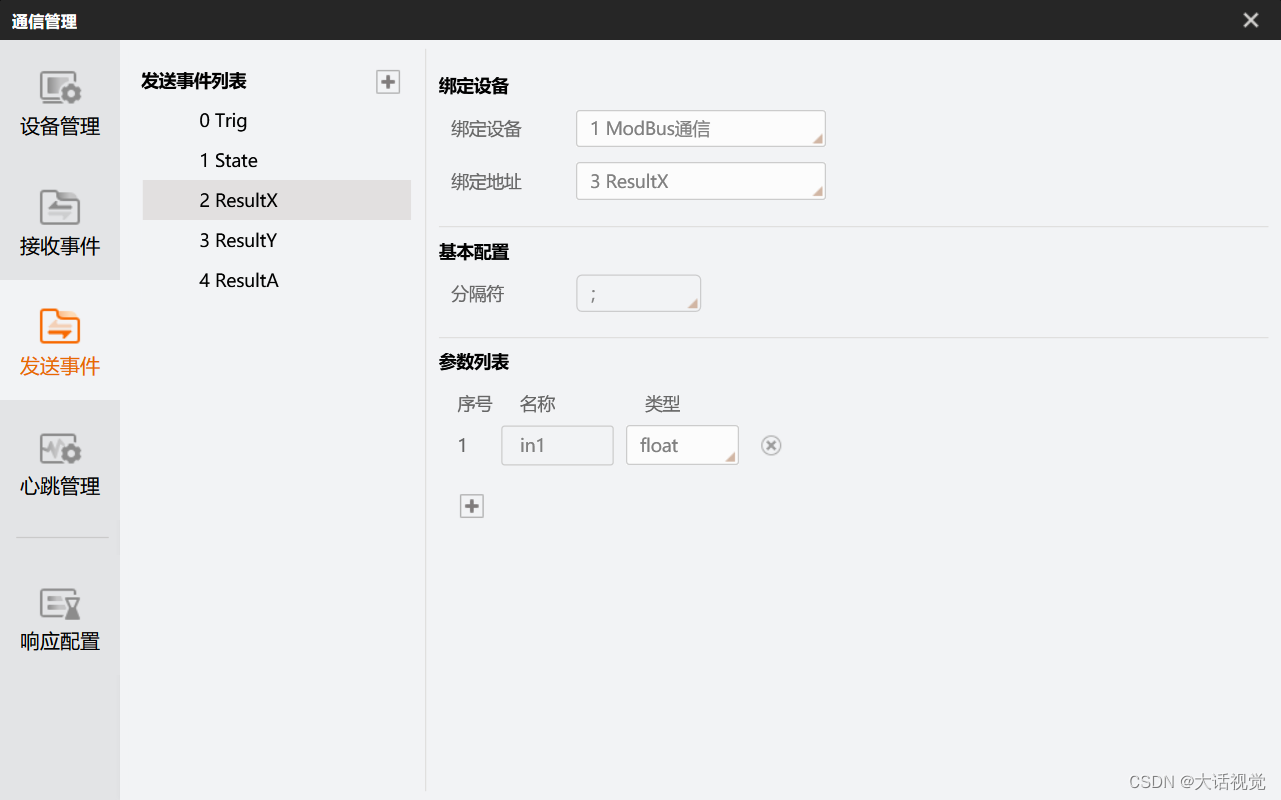
发送事件中配置好需要发送的数据,上图中配置好了触发数据(注意选择正确的绑定地址,绑定地址在前面添加通讯设备时已经创建)接着配置特征匹配状态,如下图所示:
配置特征点X坐标数据,如下图所示:
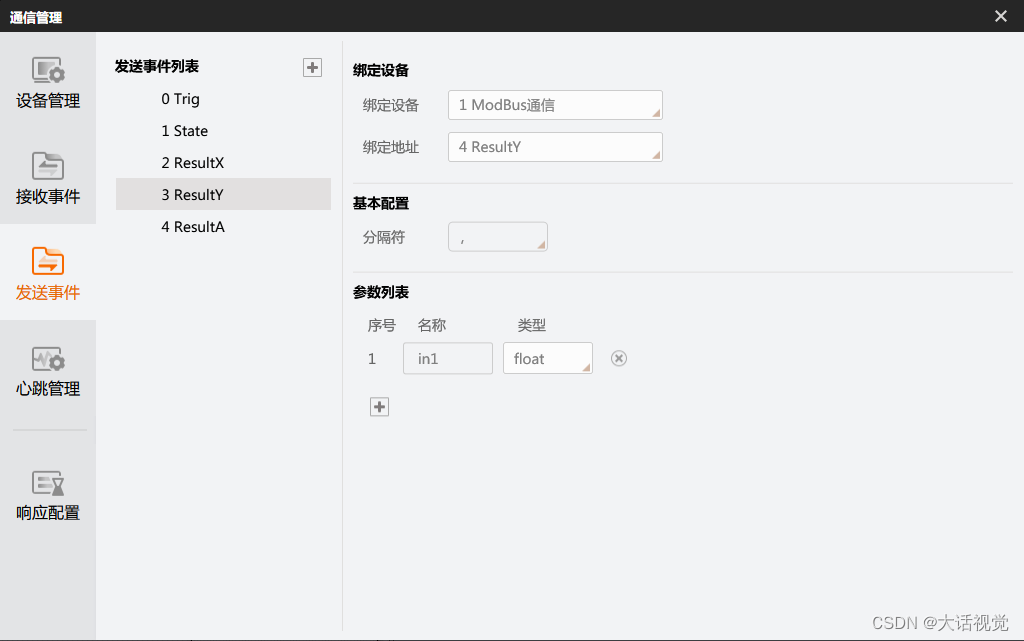
配置特征点Y坐标数据,如下图所示:
配置发送角度,如下图所示: 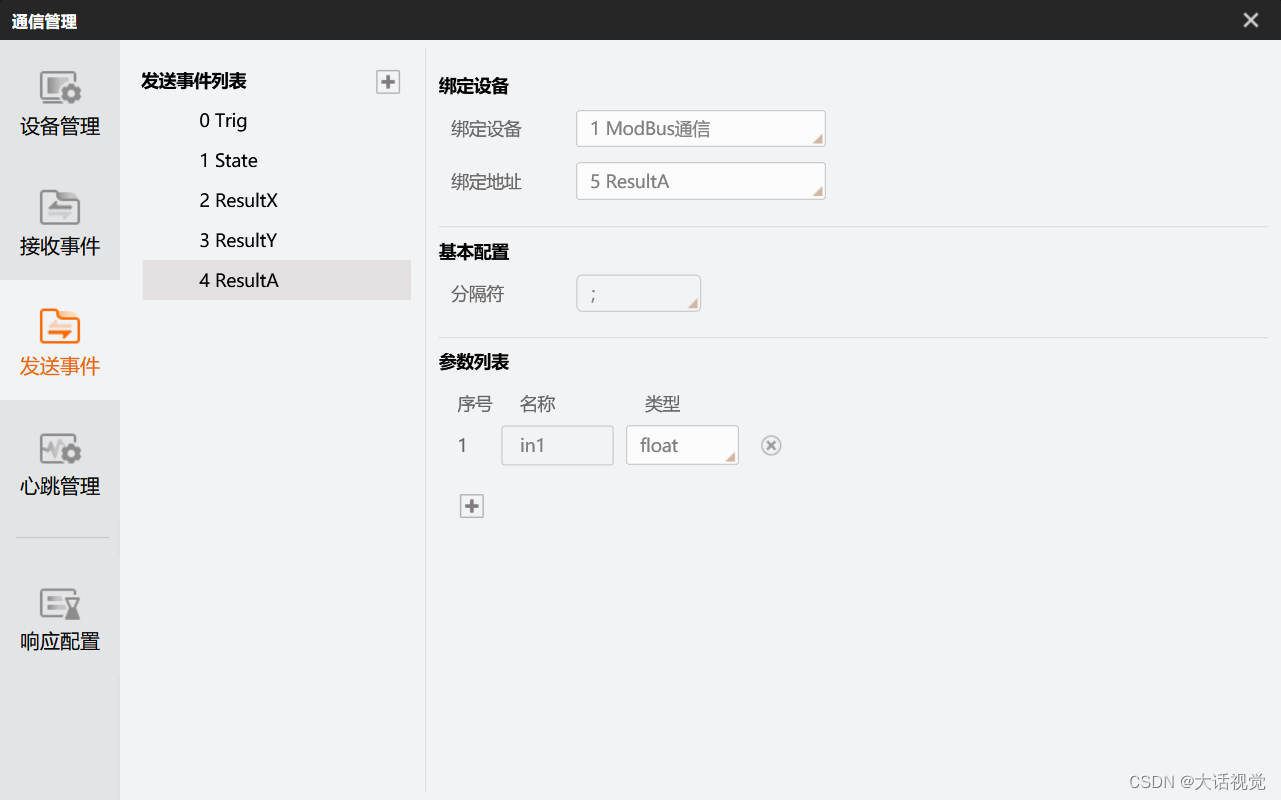
第六步,在流程中配置发送数据模块,在流程编辑页面添加数据发送模块,如下图所示:
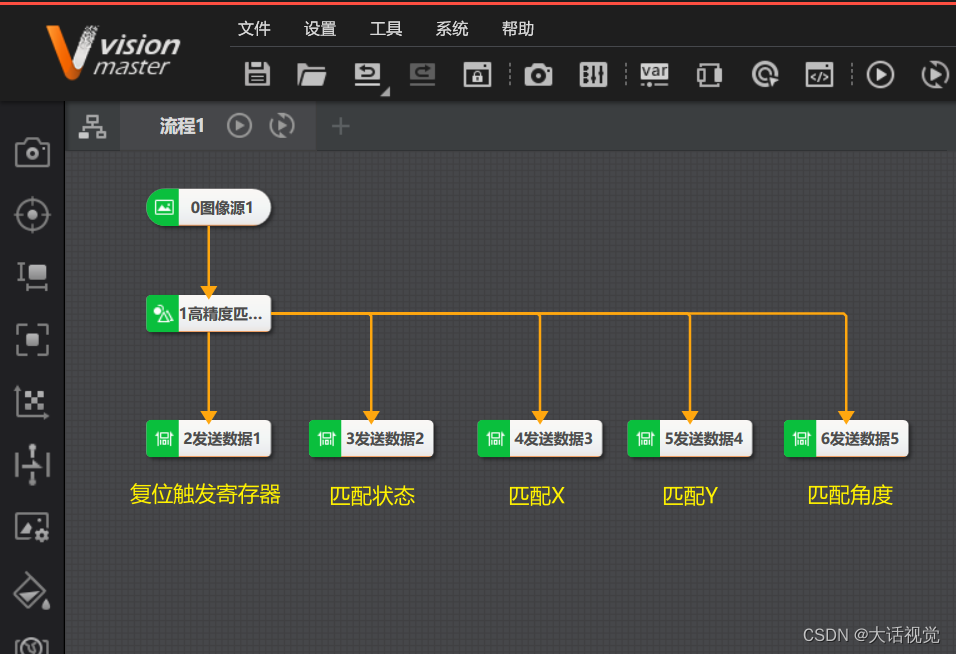
如图中所示的那样,这里配置了5个数据发送模块,之所以要配置5个数据发送模块,是因为单个数据发送模块,发送非字符串类型且每一项数据类型又不相同是做不到的,其中复位寄存器,匹配状态数据类型是整数类型,而匹配点X,匹配点Y,匹配角度是浮点数类型,因此,这里只能用5个数据发送模块来实现。以上图中,发送数据1为例,需要发送0到寄存器0000,所以配置如下图所示:

由于输出数据,订阅的值不可以是常量,所以这里选择订阅一个全局变量,这个全局变量的值为0。
其他4个发送数据模块的配置,也同样配置,主要是发送事件中下来选择正确的地址即可。匹配状态的数据发送配置如下图所示:

坐标X的数据发送配置,坐标Y的数据发送,如下图所示:

匹配坐标Y的数据发送,如下图所示:

匹配角度的数据发送,如下图所示:

至此为止,所有配置全部完成了,其实需要配置的步骤并不多,这里之所以把详细的每一步都贴图出来,目的就是为了让阅读本文的初级用户,按照本文的操作步骤一步一步来,也能解决该问题。
问题根因
- 不了解接收事件怎么用
- 不了解发送事件怎么用
- 发送非字符串类型的多个组合数据怎么操作
- 不了解全局触发工具怎么用